第9课程序设计智能风扇教学案.docx
《第9课程序设计智能风扇教学案.docx》由会员分享,可在线阅读,更多相关《第9课程序设计智能风扇教学案.docx(18页珍藏版)》请在冰豆网上搜索。
第9课程序设计智能风扇教学案
第9课程序设计——智能风扇教学案
一、提出问题
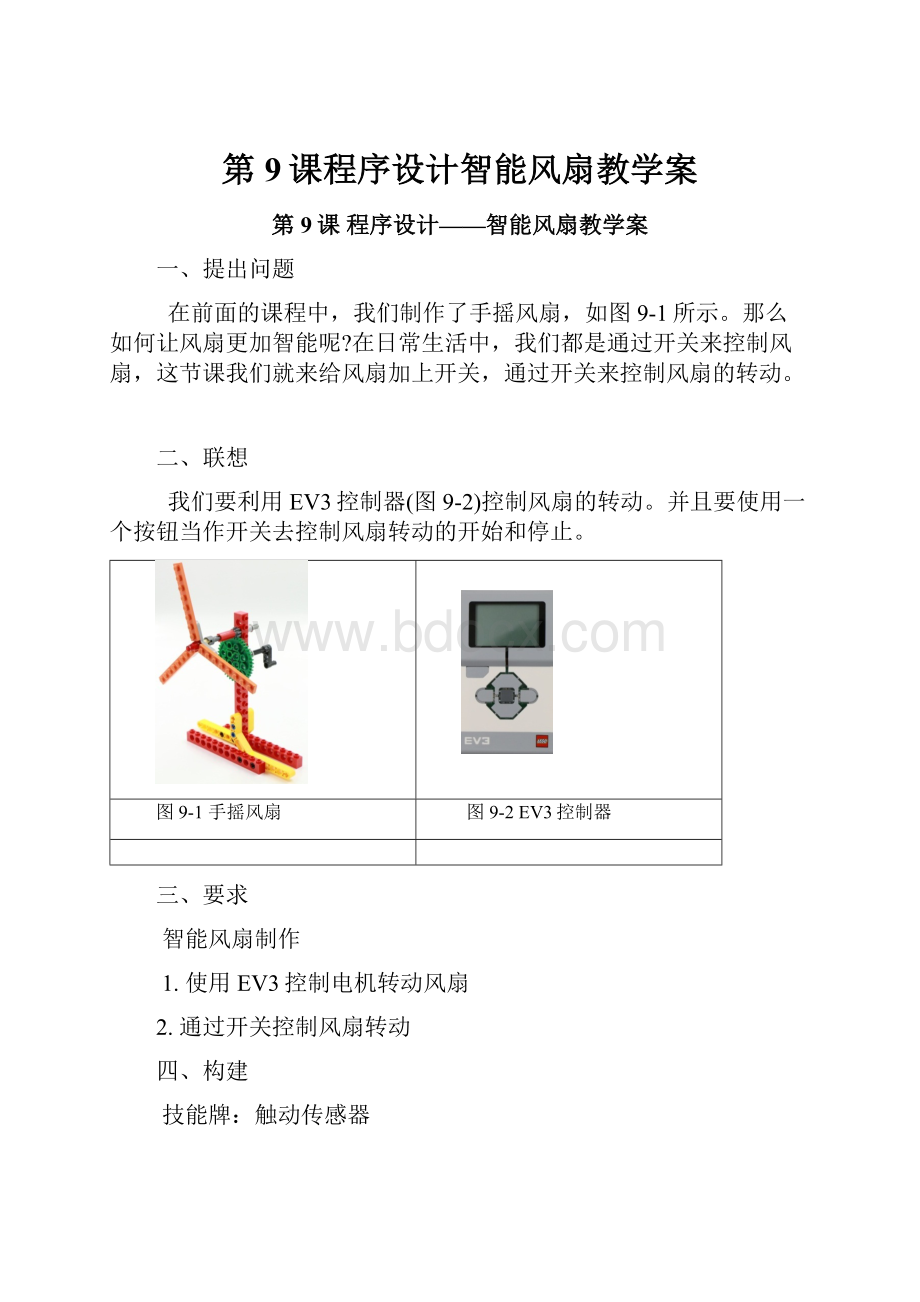
在前面的课程中,我们制作了手摇风扇,如图9-1所示。
那么如何让风扇更加智能呢?
在日常生活中,我们都是通过开关来控制风扇,这节课我们就来给风扇加上开关,通过开关来控制风扇的转动。
二、联想
我们要利用EV3控制器(图9-2)控制风扇的转动。
并且要使用一个按钮当作开关去控制风扇转动的开始和停止。
图9-1手摇风扇
图9-2EV3控制器
三、要求
智能风扇制作
1.使用EV3控制电机转动风扇
2.通过开关控制风扇转动
四、构建
技能牌:
触动传感器
触动传感器相当于是机器人的手,当触动传感器的红色触点被按下或松开的时候,这些事件都可以被机器人所感知,如图9-3所示。
乐高触动传感器有三种状态:
按压、松开和碰撞。
图9-3触动传感器
按压:
当触点被按下后,触动记数加1。
松开:
当触点松开后,触动记数加1。
碰撞:
当触点按下,然后松开后,触动记数加1。
智能风扇的安装
1.电机的选择
电机选择乐高的中型电机,又称为高速电机,如图9-4所示。
它的转速在每分钟250转。
但是中型电机的扭矩相对较小。
图9-4乐高中型电机
2.电机的安装
将风扇的手柄去掉,把电机直接安装在这个位置。
这时会发现风扇会往电机这一侧倾斜,为了调整好重心,在另一侧安装一个黑色的配重块。
这样使风扇能够平稳地立在桌面上,如图9-5所示。
图9-5中型电机控制风扇转动
3.安装触动与EV3控制器
电机通过数据线连接在输出口A,触动传感器通过数据线连接在输入口1,如图9-6所示。
图9-6EV3控制风扇转动
五、算法与程序
算法:
当第一次按下触动传感器时,风扇转动;再次按下触动传感器时,风扇停止。
程序:
1.选择“等待”模块,并选择“触动传感器”的“比较”选项,端口选择1,状态选择“1”按压,如图9-7所示。
图9-7等待触动被按压
2.控制中型电机转动
中型电机的设置为“开启”模式,如图9-8所示。
图9-8中型电机模块设置“开启”模式
3.完整程序
再次按下触动按钮使风扇停止,因此再放入一个触动等待模块,并停止电机,如图9-9所示。
图9-9触动按钮控制风扇转动和停止
注意:
一定要把程序放入循环语句中,否则只会运行一次。
六、优化与改进
刚才的程序在运行的时候大家有没有发现问题呢?
当我们长时间按触动后,松开的时候电机可能不会转动,这是为什么呢?
由于EV3控制器采集一次触动状态的时间非常短,由于程序中的两个触动等待模块都是等待“按下”的状态,因此,当我们在长按触动时,控制器已经采集了很多次“按下”的状态,这样电机还没有转动,就已经执行了后面停止电机的程序。
我们需要改进一下程序,让我们的程序不再出现这样的情况,在触动传感器的状态中有一种状态是“碰撞”,它的意思是触动传感器按下然后松开算为碰撞一次。
我们利用这个“碰撞”状态就可以解决我们刚才的问题,程序修改如图9-10所示。
图9-10触动状态改为2“碰撞”
七、实践与讨论
请你说说触动传感器中的“按压”,“松开”和“碰撞”有什么区别?
_____________________________________________________________
________________________________________________________________
八、拓展
避障小车
触动传感器除了用做开关以外,还有一个重要的用途就是避障,将传感器安装在机器人小车的前面,当触动传感器接触到前方障碍物的时候,机器人就可以感知前方有障碍物并进行躲避或绕行。
1.构建:
触动传感器的安装要注意两个问题:
第一个问题是触动传感器前面的红色触点很小,这样在碰撞障碍物的时候有可能碰不到,这是个很严重的问题,会影响到机器人的运行。
因此,我们要制作一个辅助的接触面,来增大接触面积,让触动传感器的接触点更容易接触到障碍物。
第二个问题是触动传感器安装到机器人小车上要非常牢固,由于触动传感器会与障碍物进行碰撞,传感器一旦在碰撞中掉落,那么机器人就会四处乱撞了。
1)增大触动传感器的接触面积。
用乐高积木搭建辅助接触面,并且要牢固的安装到触动传感器上,如图9-11和图9-12所示。
图9-11触动传感器侧面
图9-12触动传感器正面
2)将触动传感器安装在机器人的最前面,要能够保证当碰到障碍物的时候,触动传感器是最先接触到的,如图9-13所示。
图9-13触动传感器固定到小车前面
算法与程序
算法:
当机器人小车没有碰到障碍物时一直前进,当碰到障碍物后后退,并向左转向,然后继续前进。
程序:
避障小车的程序,如图9-14所示。
图9-14避障小车程序
九、作业
请利用触动传感器做一辆线控小车,使用三个触动传感器控制小车行
走,一个控制向左走,一个控制向右走,还有一个控制向前走。
提示:
可以用多任务程序结构,在程序中可以并行连接多条程序,这些程序可以并行运行,并行程序的连接如图9-15所示。
图9-15并行程序连接提示
第9课
智能风扇
1.乐高中型电机
2.轴销直角连通器
3.轴销转接件
4.轴销连接件连接到马达上
5.乐高铅块
6.乐高铅块固定在风扇底部
7.十字轴和轴套
8.十字轴固定到中型电机下方
9.三孔连接件连接红色长销
10.智能控制的风扇制作完成
避障小车搭建图
1.乐高触动传感器
2.长销与十字轴固定到传感器上
3.圆梁与黑色圆梁连接
4.连接直角圆梁
5.制作一个对称的积木件
6.积木件固定到触动传感器上
7.触动的前视图
8.直角圆梁
9.直角圆梁与长销连接
10.三孔圆梁
11.三孔圆梁固定到直角圆梁上
12.两孔圆梁
13.两孔圆梁与直角圆梁连接
14.制作一个对称的直角圆梁并连接
15.十字轴
16.十字轴与直角圆梁连接
17.黑色十字长轴
18.黑色十字长轴将直角圆梁与触动传感器连接
19.连接后触动传感器的正面图
20.两个轴销转接器
21.轴销转接器与触动传感器的底部连接
22.两个蓝色长销
23.蓝色长销固定在小车前面
24.触动传感器与蓝色长销连接,完成小车制作
 升级会员
升级会员 