附录3常用测量公式.docx
《附录3常用测量公式.docx》由会员分享,可在线阅读,更多相关《附录3常用测量公式.docx(10页珍藏版)》请在冰豆网上搜索。
附录3常用测量公式
附录3:
常用测量公式
直觇:
仪器架在已知高程点上,测量该点与末知高程点之间的高差称为直觇。
反觇:
仪器架末知在高程点上,测量该点与已知高程点之间的高差称为反觇。
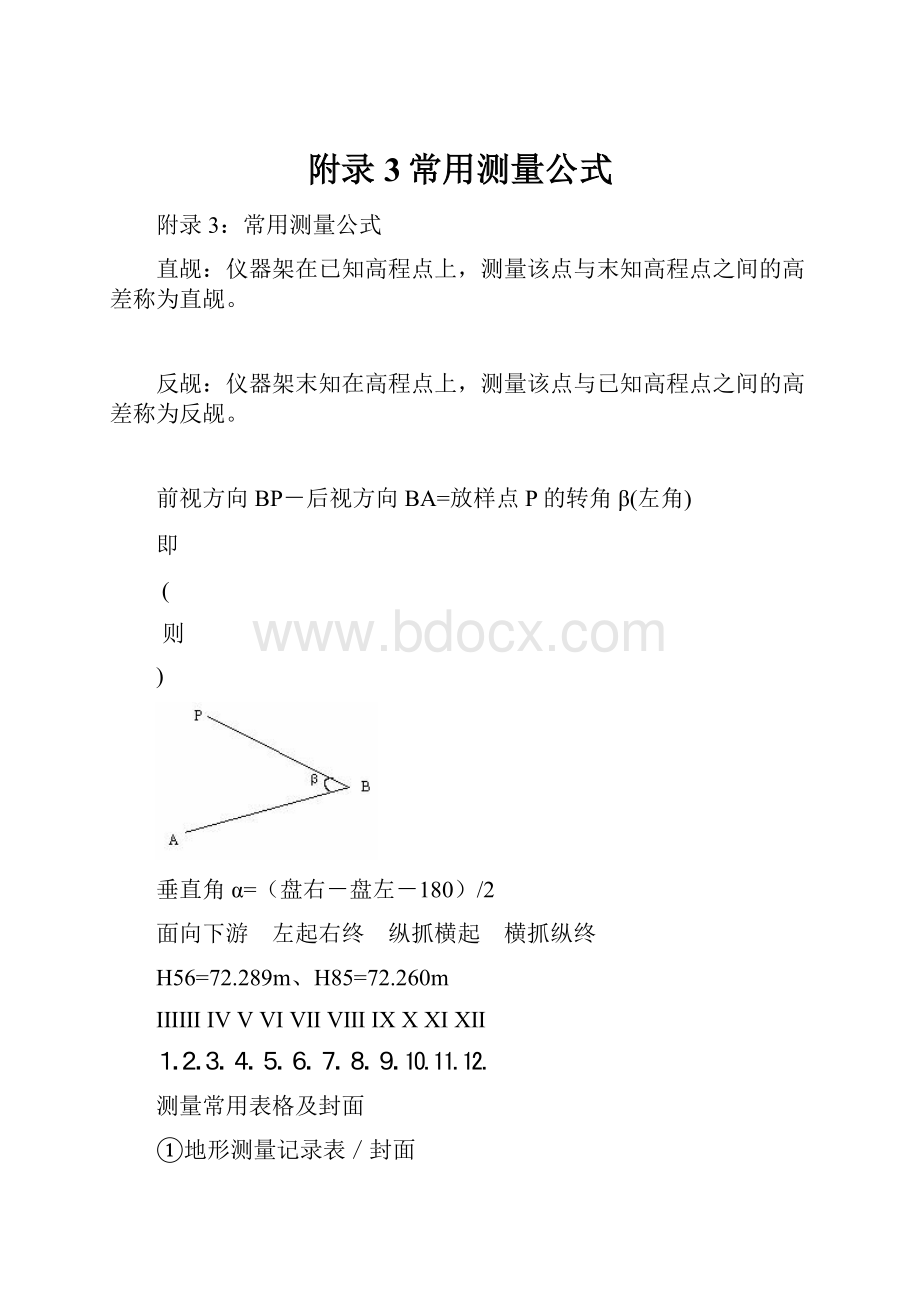
前视方向BP-后视方向BA=放样点P的转角β(左角)
即
(
则
)
垂直角α=(盘右-盘左-180)/2
面向下游 左起右终 纵抓横起 横抓纵终
H56=72.289m、H85=72.260m
ⅠⅡⅢⅣⅤⅥⅦⅧⅨⅩⅪⅫ
⒈⒉⒊⒋⒌⒍⒎⒏⒐⒑⒒⒓
测量常用表格及封面
①地形测量记录表/封面
②剖面累距表/封面
③坐标计算表/测量成果表/封面
④视差导线观测记录表
工程地质常用图幅大小
A0 A1 A2 A3 A4
1189 841 594 420 297
园周长C=2πR 园弧长L=nπR/180
其中:
n为园心角,R为半径
坐标值换算如图:
(X0,Y0)为施工坐标原点在国家坐标系统中的坐标,(X`,Y`)与(X,Y)分别为P点的施工坐标和国家坐标。
p
α为两坐标系X轴的夹角。
α以X轴为准,顺时针为正,逆时针为负。
α=αAB-α'AB
P点的国家坐标为:
X=X0+X'cosα-Y'sinα
Y=Y0+X'sinα+Y'cosα
P点的施工坐标为:
X'=(Y-Y0)sinα+(X-X0)cosα
Y'=(Y-Y0)cosα-(X-X0)sinα
其中:
α、X0、Y0为两坐标系的转换常数。
X0=XA-X'Acosα+Y'Asinα
X0=XB-X'Bcosα+Y'Bsinα
Y0=YA-X'Asinα-Y'Acosα
Y0=YB-X'Bsinα-Y'Bcosα
算例:
已知,XA=306376.666 YA=635897.054
XB=303058.640 YB=637621.976
X'A=306336.430 Y'A=635848.260
X'B=303062.279 Y'B=637655.0773
求两坐标系的转换常数α、X0、Y0
αAB=tg-1(ΔYAB/ΔXAB)=tg-1(yB-yA)/(xB-xA)
=tg-1(1724.922/-3318.206)
=152°31′54.1″
α'AB=tg-1(ΔY'AB/ΔX'AB)=151°06′29.5″
α=αAB-α'AB=1°25′24.6″
X0=XA-X'Acosα+Y'Asinα
或X0=XB-X'Bcosα+Y'Bsinα=15930.650
Y0=YA-X'Asinα-Y'Acosα
或Y0=YB-X'Bsinα-Y'Bcosα=-7365.046
现已知X'Y'求XY
编号 X' Y'
1 306165.89 636196.18
2 306209.66 636238.86
3 306189.89 636138.10
4 306235.62 636183.14
X=X0+X'cosα-Y'sinα
Y=Y0+X'sinα+Y'cosα
编号 X Y
1 306197.54 636240.63
2 306240.23 636284.38
3 306222.97 636183.16
4 306267.57 636229.33
附录4:
单一附合导线内业平差计算
当计算的fβ在容许值范围内,将其反号,平均分配;
图根导线的
转折角改正数
转折角的残余误差优先分配给短边的邻角。
闭合导线的
闭合导线的
全长闭合差
生长相对闭合差
K≤1/2000
坐标增量的残余误差优先分配给长边。
CASICfx4500P计算器实用程序-第六部分
[作者:
蔡江 出处:
四川水勘院 点击数:
122 更新时间:
2004-8-5 文章录入:
admin]
减小字体
增大字体
点号
观测角
坐标方位角
边长
纵坐标X
横坐标Y
M
γ=2804943.6
1270722.2
A
210203.4
25267.832
69220.780
2485900.7
198.616
B
1911700.0
25196.638
69035.380
2601552.1
169.596
C
561238.7
25167.992
68868.229
1362822.3
122.116
D
1091947.3
25079.475
68952.333
564801.0
130.396
E
1620948.3
25132.951
69071.272
475705.8
201.331
A
25267.832
69220.780
备
注
A=5
fβ=+42.7″fx=-0.155fy=-0.015
∑D=822.005 K=1/5200
检校:
αMA=αEA-γ
程序19——直线交点坐标计算
文件名
14
直线交点坐标计算
74步
L1
A"X0"C"Y0":
Pol(X-A,Y-C:
M=W:
D"X1"E"Y1"F"X2"G"Y2"Pol(F-D,
G-E:
(AtgnM-DtamW+E-C)/(tanM-tanW▲C+tanM(Ans-A
说明:
①程序14用以计算直线交点坐标;
②程序先输入直线上任意两点坐标,然后计算直线相交点P的坐标。
算例如下:
程序20——极坐标法放样计算
文件名
15
极坐标法放样计算
74步
L1
A"X"C"Y"D"X"E"Y":
Pol(D-A,E-C:
B=W:
ProgA:
M=B:
Pol(X-A,Y-
C▲B=W:
ProgA:
N=B:
B=N-M:
ProgA:
ProgC
说明:
①程序14用以计算直线交点坐标;
②程序先输入测站点坐标,再输入后视点坐标及前视点坐标,最后显示转折角及距离。
算例如下:
公式文件进行数学计算
公式文件格式:
title=后方交会重心公式
;点A、B、C顺时针编号,A点坐标
Xa=
Ya=
Xb=
Yb=
Xc=
Yc=
;a(α)为BC边所对的内角,∠BPC
dms(a)=
;b(β)为AC边所对的内角,∠APC
dms(b)=
;c(γ)为AB边所对的内角,∠APB
dms(c)=
D2x=(xa-xc)*(yb-ya)-(ya-yc)*(xb-xa)
ctga=1/tang(a)
ctgb=1/tang(b)
ctgc=1/tang(c)
p1=(-D2x)/((xa-xc)*(xb-xa)+(ya-yc)*(yb-ya)+D2x*ctga)
p2=(-D2x)/((xb-xa)*(xc-xb)+(yb-ya)*(yc-yb)+D2x*ctgb)
p3=(-D2x)/((xa-xc)*(xc-xb)+(ya-yc)*(yc-yb)+D2x*ctgc)
;后交点P的坐标
Xp=(p1*xa+p2*xb+p3*xc)/(p1+p2+p3)
Yp=(p1*ya+p2*yb+p3*yc)/(p1+p2+p3)
成果文件格式(论坛上显示可能有问题,请拷贝到记事本中查看效果):
测量计算书
≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌≌
┌───────────────────────────────┬──────────┐
│ 公式及已知数据 │ 计算结果 │
├───────────────────────────────┼──────────┤
│※点A、B、C顺时针编号,A点坐标 │ │
├───────────────────────────────┼──────────┤
│Xa=5316.19 │ Xa=5316.190 │
├───────────────────────────────┼──────────┤
│Ya=6992.37 │ Ya=6992.370 │
├───────────────────────────────┼──────────┤
│※B点坐标 │ │
├───────────────────────────────┼──────────┤
│Xb=5511.12 │ Xb=5511.120 │
├───────────────────────────────┼──────────┤
│Yb=7615.91 │ Yb=7615.910 │
├───────────────────────────────┼──────────┤
│※C点坐标 │ │
├───────────────────────────────┼──────────┤
│Xc=5031.33 │ Xc=5031.330 │
├───────────────────────────────┼──────────┤
│Yc=7344.96 │ Yc=7344.960 │
├───────────────────────────────┼──────────┤
│※a(α)为BC边所对的内角,∠BPC │ │
├───────────────────────────────┼──────────┤
│a=108+42÷60+24÷3600 │ a=108-42-24.0 │
├───────────────────────────────┼──────────┤
│※b(β)为AC边所对的内角,∠APC │ │
├───────────────────────────────┼──────────┤
│b=114+36÷60+36÷3600 │ b=114-36-36.0 │
├───────────────────────────────┼──────────┤
│※c(γ)为AB边所对的内角,∠APB │ │
├───────────────────────────────┼──────────┤
│c=136+41÷60 │ c=136-41-0.0 │
├───────────────────────────────┼──────────┤
│※计算公式 │ │
├───────────────────────────────┼──────────┤
│D2x=(xa-xc)×(yb-ya)-(ya-yc)×(xb-xa) │ D2x=246351.973 │
├───────────────────────────────┼──────────┤
│ctga=1÷tang(a) │ ctga=-0.339 │
├───────────────────────────────┼──────────┤
│ctgb=1÷tang(b) │ ctgb=-0.458 │
├───────────────────────────────┼──────────┤
│ctgc=1÷tang(c) │ ctgc=-1.061 │
├───────────────────────────────┼──────────┤
│p1=(-D2x)÷((xa-xc)×(xb-xa)+(ya-yc)×(yb-ya)+D2x×ctga) │ p1=0.994 │
├───────────────────────────────┼──────────┤
│p2=(-D2x)÷((xb-xa)×(xc-xb)+(yb-ya)×(yc-yb)+D2x×ctgb) │ p2=0.656 │
├───────────────────────────────┼──────────┤
│p3=(-D2x)÷((xa-xc)×(xc-xb)+(ya-yc)×(yc-yb)+D2x×ctgc) │ p3=0.815 │
├───────────────────────────────┼──────────┤
│※后交点P的坐标 │ │
├───────────────────────────────┼──────────┤
│※ │ │
├───────────────────────────────┼──────────┤
│Xp=(p1×xa+p2×xb+p3×xc)÷(p1+p2+p3) │ Xp=5273.963 │
└───────────────────────────────┴──────────┘
Page:
1
┌───────────────────────────────┬──────────┐
│Yp=(p1×ya+p2×yb+p3×yc)÷(p1+p2+p3) │ Yp=7274.886 │
├───────────────────────────────┼──────────┤
│ │ │
└───────────────────────────────┴──────────┘
Page:
2
Precision:
3 decimal(s)
Date:
2000-10-11
 升级会员
升级会员 