机器人视觉系统算法.docx
《机器人视觉系统算法.docx》由会员分享,可在线阅读,更多相关《机器人视觉系统算法.docx(6页珍藏版)》请在冰豆网上搜索。
机器人视觉系统算法
■视觉是人类获取信息强有力而又最有效的手段,它不仅是指对光信号的感受,而且包括对视觉信息的获取、传输、处理、存储与理解的全过程。
■双目立体视觉方法,该方法模拟人眼立体成像的过程,用两个有一定间距、成一定角度的CCD相机同时摄取场景的图象,根据光学三角形原理来获得物体表面空间点的三维坐标
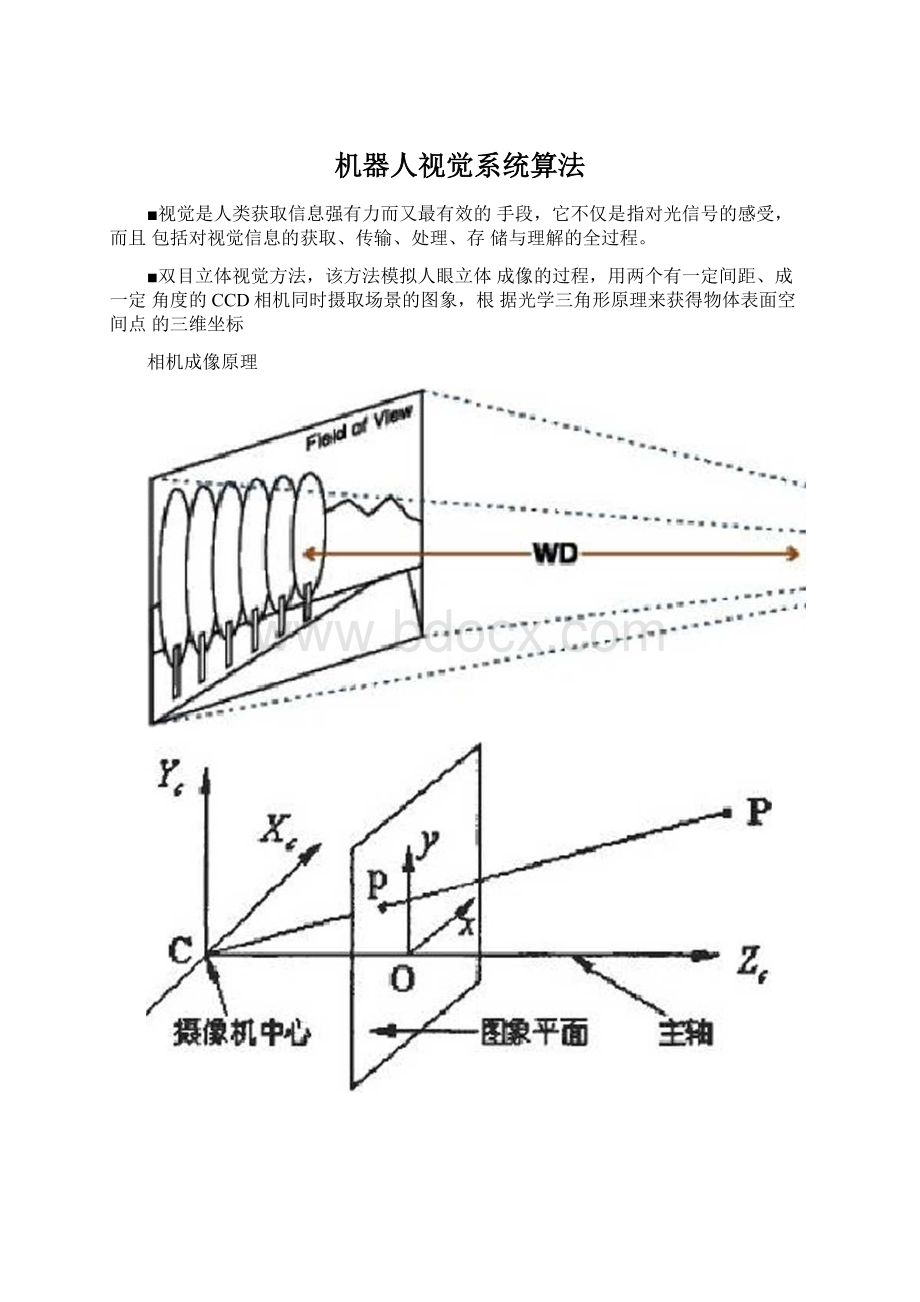
相机成像原理
双目立体视觉方法:
P
d
则由相似三角形得:
B~~la+lb+a
B+1&+ci
a
B—/+£+QI
_ab_1a
a+J
——1
B+1匕十aB+1&+a
图像坐标系、摄像机坐标系、世界坐标系:
■图像坐标系和摄像机坐标系的关系:
■摄像机采集的图像输入计算机,每幅数字图像在计算机内为MXN数组,M行N列的图像中的每一个元素(称为象素)的数值即是该图像点的亮度(或称灰度)。
在图像上定义直角坐标系“u-0-v,每一象素的坐标(u,v)分别是该象素在数组中的列数和行数,所以,(U,V)是以象素为单位的图像坐标系坐标。
o
0
y
X
dx0-如必
•・
u
y
S3
0dy
V
1
・■
001
■■
1
■<
世界坐标系和摄像机坐标系关系:
■■u
'1/dx
fga/dy
Zc
V
=
0
1
0
p
0
axsuQ
=ov0
001
vo
1
0"
0
0
0
0
0
d
图像处理流程图:
图像背景去除、平滑、滤波、去噪等处理
基于阈值、象素、区域增长、边缘检测等方法
基于Hough变换、儿何属性、最小-•乘法等
提取出拟合圆心、面积等特征参数,确定中心点
圆心x
圆心Y
半径R
圆心X
園心Y
半径R
中%T节<廿
中%T节<廿
采集装置
釆摘现场
7
V
釆集图像
采集图像
图像预处理
图像预处理
t
t
特征提取
特征提取
块
识;别I模
1立体匹
I配模块
I
"査满足纟洽
!
空间定I位模块
三维空间定位
计算机系统
左摄像机右摄像机
 升级会员
升级会员 