matlab课程设计格式模板.docx
《matlab课程设计格式模板.docx》由会员分享,可在线阅读,更多相关《matlab课程设计格式模板.docx(11页珍藏版)》请在冰豆网上搜索。
matlab课程设计格式模板
第一章绪论
MATLAB由一系列工具组成。
这些工具方便用户使用MATLAB的函数和文件,其中许多工具采用的是图形用户界面。
包括MATLAB桌面和命令窗口、历史命令窗口、编辑器和调试器、路径搜索和用于用户浏览帮助、工作空间、文件的浏览器。
随着MATLAB的商业化以及软件本身的不断升级,MATLAB的用户界面也越来越精致,更加接近Windows的标准界面,人机交互性更强,操作更简单。
而且新版本的MATLAB提供了完整的联机查询、帮助系统,极大的方便了用户的使用。
简单的编程环境提供了比较完备的调试系统,程序不必经过编译就可以直接运行,而且能够及时地报告出现的错误及进行出错原因分析。
第二章理论计算设计及结果
2.1确定原系统数学模型
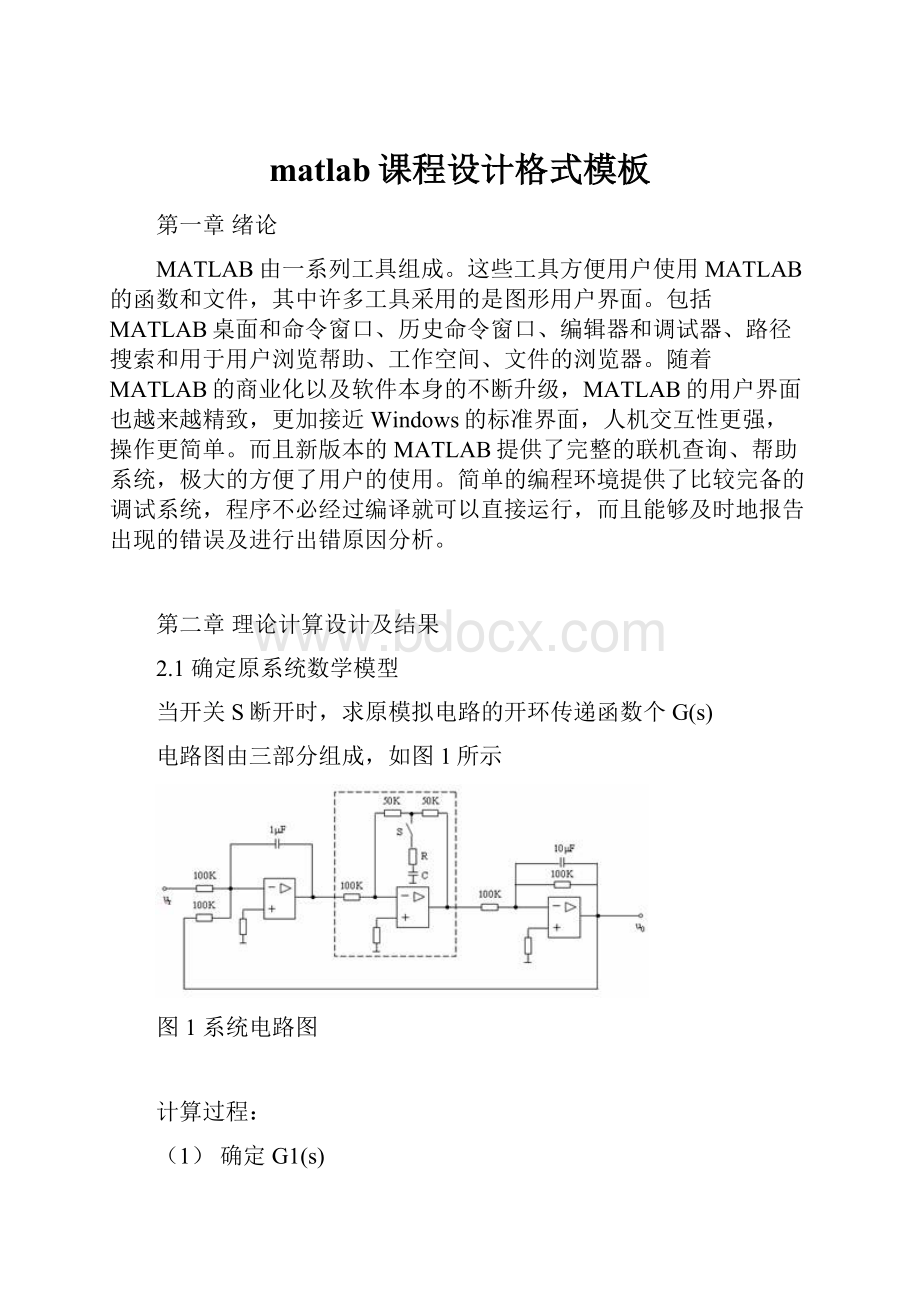
当开关S断开时,求原模拟电路的开环传递函数个G(s)
电路图由三部分组成,如图1所示
图1系统电路图
计算过程:
(1)确定G1(s)
=
R=100K
C=1uF
所以G1(s)=
=
(2)
=
R1=100K,R2=50K,R3=50K
所以G2(s)=
=1
(3)
=
R4=100K
=
+
R5=100K
C=10uF=10-2
所以G3(s)=
=
G(s)=G1(s)G2(s)G3(s),所以G(s)=
2.2确定原系统性能:
c、(c)
开环传递函数A(ωc)=10/ωc2√ωc2+1=1原系统达到幅值穿越频率时A(ω)=1A(ωc)=10/ωc2√ωc2+1=1经计算由:
ωc=3.1
校正前系统的相位裕量为γ=180。
+φ(ωc)=180。
-90。
-arctan(ωc)
将ωc=3.1代入式中得γ=17.9。
。
2.3确定校正装置传递函数Gc(s),并验算设计结果
设超前校正装置的传递函数为:
,>1
若校正后系统的截止频率c=m,原系统在c处的对数幅值为L(c),则:
由此得:
=3.94
由,
得时间常数T为:
将a=3.94,ωm=4.4带入得T=0.11447
再将a=3.94,T=0.11447带入超前校正装置传递函数中得
=
第三章matlab仿真设计
利用Matlab进行仿真设计(校正),就是借助MATLAB相关语句进行上述运算,完成以下任务:
确定校正装置;
绘制校正前、后、校正装置对数频率特性;
确定校正后性能指标。
从而达到利用Matlab辅助分析设计的目的
单位反馈线性系统开环传递函数为:
要求系统在单位斜坡输入信号作用时,开环截止频率c≥4.4弧度/秒,相位裕量≥450,幅值裕量h≥10dB,利用Matlab进行串联超前校正。
1、绘制原系统对数频率特性,并求原系统幅值穿越频率wcp(c))、相位穿越频率wcg、相位裕量Pm[即(c)]、幅值裕量Gm
num=[10];
den=[1,1,0];
G=tf(num,den);%求原系统传递函数
bode(G);%绘制原系统对数频率特性
margin(G);%求原系统相位裕度、幅值裕度、截止频率
[Gm,Pm,wcg,wcp]=margin(G);
grid;%绘制网格线
原系统伯德图如图2所示,其截止频率、相位裕量、幅值裕量由
图中可见
图2校正前系统伯德图
2、求校正装置Gc(s)(即Gc)传递函数
L=20*log10(10/(4.4*sqrt(4.4^2+1)));%求原系统在c=4.4处的对数幅值L
a=10^(-L/10);
wc=4.4;
T=1/(wc*sqrt(a));
numc=[a*T,1];
denc=[T,1];
Gc=tf(numc,denc);
3、求校正后系统传递函数G(s)(即Ga)
numa=conv(num,numc);
dena=conv(den,denc);
Ga=tf(numa,dena);
4、求校正后系统对数频率特性,并与原系统及校正装置频率特性进行比较
w=logspace(-1,2);
bode(Ga);
holdon;
bode(G,’:
’,w);
holdon;
bode(Gc,’-.’);
grid;
校正前后伯德图如图3所示,校正装置参数a=3.9417,T=0.11447,校正装置传递函数为
图3校正前、后、校正装置伯德图
5、求校正后系统截止频率wcp、相位裕量Pm、幅值裕量Gm,程序如下:
bode(Ga);
margin(Ga);
[Gm,Pm,wcp]=margin(Ga);
grid;
校正后系统的伯德图如图4所示,在图中可见其截止频率、相位裕量、幅值裕量,校正后的各项指标都达要求。
图4
第四章Simulink仿真分析
4.1原系统单位阶跃响应
原系统仿真模型如图5所示
图5
系统运行后,其输出阶跃响应如图6所示
图6
4.2校正后系统单位阶跃响应
校正后系统仿真模型如图7所示
图7
系统运行后,其输出阶跃响应如图8所示
图8
4.3校正前后系统阶跃响应的比较
仿真模型如图9所示。
图9
系统运行后,器输出阶跃响应如图10所示。
图10
第五章确定有源超前校正网络参数R、C值
确定校正装置传递函数Gc(s),并验算设计结果:
原得到超前校正前系统传递函数为Gc(s)=
=
校正后系统传递函数G(s)=
其相位裕量γ’=180。
+φ(ωc’)=180。
+(arctan0.456*4.4-90。
-arctan4.4-arctan0.11447*4.4)=49.8。
>45。
幅值裕量h=∞,系统的性能完全满足。
又有a=1+
R2=50K,R3=50K,a=3.94所以代入求得R=8.5KΩ;
又因为C=T/RT=0.11447,R=8.5KΩ代入得C=13.46uF。
五、校正装置的作用
在确定了合理性能指标以后,就可以进行系统的初步设计,着手选择系统的执行元件测量元件和放大器等,这些是构成控制器的基本元件,它们连同被控对象,组成控制系统的基本部分。
被控对象和控制装置的基本元部件确定以后,就可将系统组装起来。
那么,这是得系统是否能够全面符合性能指标的要求呢?
实践证明,一般不是很理想的,这就需要在系统联式之前进行认真的分析计算。
假使性能不佳,满足不了性能指标的要求,就要在容许范围内调整基本元件的某些特性和参数(最容易改变的是放大器的增益)。
如果经过这样的调整仍然达不到性能指标的要求,就得在原系统的基础上采取另外一些措施,即对系统加以“校正”。
所谓校正,就是给系统附加一些具有某种典型环节特性的点网络,模拟运算部件及测量装置等,靠这些环节的配置来有效地改善整个系统的性能,借以达到要求的指标。
由此可见,要改善系统的性能,有两个途径,一条是调整参数,另一条就是增加校正环节。
按照校正装置在系统在系统中的链接方式,控制系统校正方式可分为串联校正,反馈校正,前馈校正和符合校正四种。
总结
本次课程设计我们用到了Matlab软件,并且学会了如何使用它,对我们以后的学习和工作是有很大帮助的。
这次课程设计用到了很多方面的知识,有些知识只有在用到时才知道它的重要性,通过这次课程设计使我知道了学习要学的透彻,以及要经常地复习,这样才能最快的完成学习任务。
做完本次课程设计,使我对自动控制技术有了更深刻的了解,以前在课本上有很多不明白的问题,在完成课程设计的时候有了很多的思路,帮助我记忆了知识,理论是一方面,实践看来也很重要,以后自己应该加强实践的训练。
通过这次实践,找到了自己的不足,在以后的学习和生活中尽量的完善自己,认真复习和加强自己的实践能力,对每件事情都应尽可能的做到最好。
致谢:
在这次课程设计中我学到了很多关于自动控制的知识,更重要的是学会了相关软件的使用方法,在此真诚感谢老师的悉心指导与帮助。
 升级会员
升级会员 