几个开环及闭环自动控制系统的例子.docx
《几个开环及闭环自动控制系统的例子.docx》由会员分享,可在线阅读,更多相关《几个开环及闭环自动控制系统的例子.docx(32页珍藏版)》请在冰豆网上搜索。
几个开环及闭环自动控制系统的例子
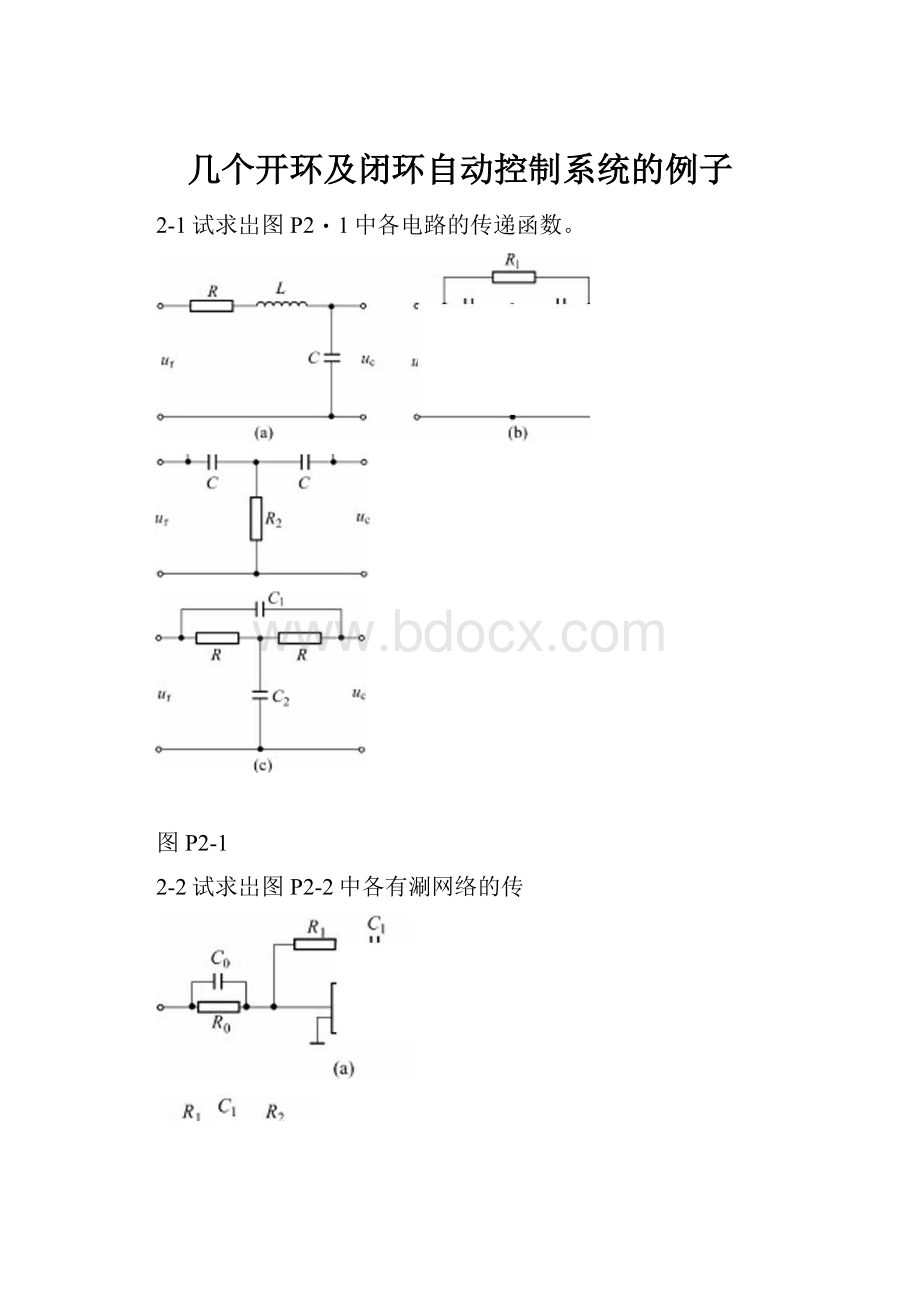
2-1试求岀图P2・1中各电路的传递函数。
图P2-1
2-2试求岀图P2-2中各有涮网络的传
R]C]
(b)
图P2-2
2-3求图P2-3所示各別械运动系统的传递函数。
(1)求图(a)的啤=xa
(3)求图(c)的翔=?
X[($丿
(2)求图(b)的
Xg°
⑷求图山的帑
(n>
(b)
S)
图P2-3
2-4图P2-4»示力一齿轮传动柄构。
设此机构无间隙、无变形,求折算到传动轴上曲等效转动慎量、等0000^)=ggo
图P2-4图P2-5
2-5图P2-5H)示力一龌场技制的頁逍电动机。
设工作时电枢电浹不变,控制电压加在励磁绕组上,输出为电机角值務,求传递函数W(s)=£^。
讣)
2-6图P2-6所示力一用作笊大器wss发电机,原电innii定转速运行。
试埔定传遐函数鵲"($),OOOOOSOB.
2-7已知一系貌由如下方样组组成,试绘制系统方框图,并求出闭坏传递函数。
x!
(S)=X,.($网(s)_州($)[%($)-%($)]X「($)X2(5)=VV2(5)[X,(5)-IV6(5)X3(5)]
X3(S)=[X2(S)-XC(s)W5(5)]w3(5)
Xr(5)=VV4(5)X3(5)
2-8试分别化简图P2-7ff图P2・80j示的结构图,并求出相应的传連函数。
图P2-7
图P2-8
2-9求咖图P2-9所示系躱的传递因数%(s)=翔,W2(s)=#^。
图P2-9
2-10求如图P2-10示系统的传递函数。
2-11求图P2-110(示系我的冈环传递函数。
图P2-11
图P2-12
2-13
酉出图P2-13所示结构图的信号逍图,用IS逊公式求传递函数:
w,(5)=
X,s)
W2(5)=
Xg
N(Q°
画出图P2-14所示系躱的信号潦图,并分别求出两个系説的传递函数
2-14
X」s)Xc2(s)
x:
i(s)x:
2“)
图P2-14
3-1一单位反锁控制系统的开坏传递函数为*0
求:
(1)系就的单位阶跃咆应及动态特It指标6%、t、ts.h;
(2)输人量人(t)=t时,系统的揄岀响应;
(2)输人量x‘(t)为单位脉冲函数时,系统的输岀响应。
3-2一单位反彊控制系筑的开环传递函数为Wk(s)=—L,具单位阶趺响应曲裁咖图
P3-1所示,图中»Xm=1.25,tm=1.5so试關定系竦参8K.Bt(Bo
图P3-1
3-3—单位反饋控罚系统的开环传递函数为*k(s)=乔釜)。
已知系统的xUt)=1(t),误差时间函数力旳)=1.4广5_0.4广3加,求系就的皿尼比g、自然按葫角頓率©、系躱的开环传递因数和闭坏传递函数、系统的息态误差。
3-4已知单位反儼控制系统的开坏传递函数为wK(s)=J^—9试选择《及t值以满足下列S(ZJ+1)
指标。
当X((t)=t时,系给的稳态误差e(X)wo.02;
当xf(t)=1(t)wf系统的8%^30%,ts(5%)wo.3s。
3-5已知卑位反彊控制系就的闲坏传递因数力W,$)=―爼——,试酉岀以轴力常$・+2^n54-d>-
数、g为变w,系就特征方杈直的根在s夏平面上的分布ikito
3-6一系统的动态结构图咖图P3-2所示,求在不同的Kk值下(例如,Kk=1、K尸3、Kk=7)系
统的冈坏檢点、单位阶跃响应、动态指标及稳态误差。
•5($)
图P3-2
3-7一用坏反馈控制系筑的动态结构图咖图P3-3®示。
(1)求当5%w20%、ts(5%)=1.8sW,系貌的参数K.Eifflo
(2)求上述系貌的位置误差系数人、速度误差系数《、加速度误差系数匕及其《|应的穩态淚差。
图P3-3
3-8一系统的动态结构因如图P3-4所示。
求
(1)八=0山2=0・1时,系貌的5%、0(5%)
(2)Fj=0.1,r2=0时,系鋭的5%、匚(5%)
(3)比较上述两种校正情况下的暂态11能指标及隐态11能。
图P3-4
3-9如图P3-5所示系统,图中的为阔节对象的传递函数,肥(小为调节器的传递函
数。
如果阚节对象为叫(S)=(斤“魚M,T,>T2,系统要求的指标为:
位置稳态误差
力零,调节时冋最矯,超调量5%W4.3%,冋下述三种囲节器中哪一种能满足上述指标?
M参数应具备什么条件?
三种碉节器为
(a)叱.($)=心;(b)(c)叭(s)=©((;;:
:
。
图P3-5
3-10有闭坏系貌的特征方f?
氏如下,试用劳斯判据列斷系蔬的穩定11,并说明特征根在复
平面上的分布。
(1)534-2052+454-50=0
(2)53+20524-45+100=0
(3)丿+2?
+6壬+8$+8=0
(4)2$'+54-15$'+25疋+2$-7=0
(5)卫+32+9〃+18?
+22宀12$+12=0
3-11卑位反馈系魏的开环传递函数为
叫($)=
心(0・5$+1)
5(54-1)(0.5524-S4-1)
试爾定使系统稳定的K托XBo
3-12已知系筑的结构图如图P3・6所示,试用劳斯刑槪埔定使糸统稳定的怜值X围。
图P3-6
3-13如果采用SP3-7W示系就,冋『取何値时,系统方能棣定?
3-14设单位反彊系统的开坏传递函数力%($)=讪+()33;1+()]67,)'要来闭坏特征根的实部均小干一1,求K值应取的X围。
图P3-7
3-15设有一单位反债系统,如果其开坏传递因數为
(1)%($)=
10
$(・$+4乂5$+1)
⑵呗)=
10(s+0・l)
y2(s+4)(5£+l)
求输人量为心(,)=『和心(”=2+4/+5八时系统的稳态误差。
3-16有一单位反彊系统,系貌的开坏传递函数为\臥)=也。
求当输人量ft^r(/)=-/2和s2
xr(t)=sinter时,控闕系统的穩态误差。
3・17有一单位反彊糸蔬,其开环传递函数为叫(計=矣兰,求系统的朋态娱差系数;并求5(55-1)
当输人量为心")=1+“$2时,梯态误差的时间函数e(f)0
3-18一系统的结构图如因P3-8所示,并设怙)="1+G),昭($)心当扰动
ss(l^T2s)
量分别以从心)=+、占作用于系统时,求系统的折动橡态误差。
A.V(v)
叭“)
+
M:
(v)
g(?
)
图P3-8
3-19一夏合控制系统的结构图如图P3-9H)示,其中k】=2K3=1,T2=0.25s,K2=2o
(1)求输入量分别Jlx,.(/)=!
,A7(O=f,A-r0=lz2H,系统的稳态娱差;
(2)求系统的单位阶趺响应,g«5%,Gfflo
图P3-9图P3-10
3-20一夏合控制系统如因P3-10所示,图Wc(s)=as2+bs,%($)=血十。
】;:
()卄)如果系统由1型提高为3里系统,求a值及b值。
4-1求下列各开坏传递函数所对应的负反馈系统的ffiinao
(1)WK(s)=
K(+3)
(5+1)(5+2)
(2)WK(s)=
K/s+5)
s(s+3)(s+2)
(3)WK(s)=
KJy+3)
(5+1)(5+5)(5+10)
4-2求下列各开坏传递函数所对应的负反馈系统的根扎违。
(1)叭(s)=
K(+2)
+2s+3
⑵咖f+2)(—2)
WK(s)=
K/s+2)
s(s+3)(52+2$+2)
(4)
叭(S)=K—'~11
人5(5-l)(52+4$+16)
(5)
叭($)=
KJO」s+l)
5(5+1)(0.255+l)2
4-3已知单位负反鎮系统的开坏传递函数为
林($)=
K
s(Ts+l)(.y2+2s+2)
求当K=4时,以T为参变量的根IUo
4-4已知单位负反彊系就的开坏传递函数为
WK(s)=^^-
T(S+1)
求当K=1B,JU为参变量的根IUo
4
4-5巳知单位负反彊系鋭的开坏传递函散为
林⑴=
人(5+16)(52+25+2)
试用根轨违法确定使fflJFl导根点的皿尼比^=0.5和自然角盹率^r=2W^Bo
4-6巳si单位正反慎系统的开坏传递函散为
a
WK(5)=r
人(5+1)(5-1)(5+4)2
试绘制貝根
4-7设系统开环传递函数为
KJs+l)
s'(s+2)(s+4)
试绘制糸统在负反彊与正反彊两种侑况下的SUUo
4-8设单位负反彊系説的开坏传递因数力
K(s+1)
"(O.ls+l)
如果要求系貌的一对共犯主导根的讯尼系数为0.75f用8HU法确定
(1)串»H1E迟后坏节,设々=15。
(2)串联松也弓|前坏节,设©=15。
4-9巳知单位负反愎系统的开坏传递函数为
a
w(巧=2
5(5+4)(5+20)
设要求^>12(l/s).J%<25%.ts<0.75,试确定串联引前校正装置的传递函数,并
绘制校正前、后的系统根软违。
4-10设单位负反鎮系统的开坏传递函数为
叭(沪
sG+4)($+5)
要求校正后>30(1/5).J导根点皿尼比=0.707,试求串联迟后校正装置的传递函数。
4-11巳知负反償系统的开坏传递函数为
叭(°=
K
5(25+1)
要使系统闭环壬导柿戊的皿尼比纟=0・5、自然振蒲角颉率®=5、/:
v>50(1/5)W,求串
曲迟后一引前校正装置的传递函数,并绘制校正痢、后的系
5-1巳知单位反憬系统的开环传递函数为
叭(5)=
10
5+1
当系统的给定借号为
(1)xrl(t)=sin(/+30°)
(2)xr2(t)=2cos(2r-45°)
(3)xr3(t)=sin(/+30°)-2cos⑵一45°)
W.求系统的总态输出。
5-2绘岀下列各传递函数对应的幅相颜率特性。
(1)W(s)=Ks-n(K=10,N=1、2)
(2)W(5)=
10
0・ls±l
⑶W(s)=Kr"(K=10,N=l、2)
⑷W(5)=10(0.15±l)
W(s)=
4
s(s+2)
W(s)=
4
(5+1)(5+2)
W(s)=
s+3
5+20
W(s)=$+°・2
5(5+0.02)
(9)W(s)=Ts2+2^Ts+\@=0.707)
“、25(0.25+1)
(10)W($)=__1
r+2s+l
5-3绘出习題5・2各传递函数对应的对数頫率特性。
5-4绘岀下列系躱的开坏传邂因数的幅柑顺率待性和对数颉率特性。
(1)WK(s)=
(1>7;>T2>T3>0)
K(7>+1)
s(T{s+\)(T2s+\)
500
S(S2+5+100)
-0.2a
(3)WK(s)=
5-5用奈氏梯定圳据判斷下列反喷糸锐的隐定性,各系筑开坏传递函数如下
(1)叭")=
(r3>Tl+T2)
K©+1)
s(T}s+1)(T25+1)
(3)(5)=
100(0・01s+l)
s($-l)
(2)叫(s)=
10
s(s-l)(0・2s+l)
5-6设系説的开坏幅柑頻率将性如图P5“所示,写出开坏传递函数的形式,判斷用坏系统是否稳定。
图屮P力开坏传递函数右半平面的根点数。
(c)P=]
(d)2型系统
(h)P=2
图P5-1
5-7巳知最小相位系躱开环对数幅航特性如图P5・2。
(1)写出其传递函数
(2)绘出jfilfl的对数相頻特性
图P5-2
5-8已知系统开坏传递函数分别为
(1)WK(s)=
K5(0.255+1)(0.065+1)
(2)WK(s)=
75(0.25+1)
疋(0・025$+1)(0・006$+1)
试绘制渋徳图,求用位裕量及用益裕量,并WKifflJF系统的IB定性。
5-9设卑位反馈系竦的开坏传递函数为
叭G)=
2
5(0.15+1)(0.55+1)
当输入信号©«)为5rad/s的正弦信号时,
求系统梅态误差。
5-10已知单位反饋系统的开坏传递函数,试绘制系竦的冈环頻率特tt,it算系统的诰板颉
率及遭振瑋ffio
(1)WK(S)=
16
s(s+2)
(2)WK(s)=
60(0.55+1)
5(55+1)
5-11单位反at系躱的开环传递函数为
WKG)=
5(0.087^+1)
试用颉喷fD时域关系求系竦的趙讯量》%及调节时间匚
5-12巳知单系统的开坏传递函数为
10
5(0.15+1)(0.015+1)
作尼氏图,并求出皓捺哗值和稳定裕量。
5-13如图P5-3Hj示力0里单位反锁系统的开环懾相航率特性,求该系就的皿尼比纟和自然
振蓿角頻率。
图P5-3
6・1设一单位反锻系统其开坏传递因数力
4K
s(s+2)
若便系缆的II态速度娱差系数人=20.厂,柑位裕量不小于50%增益裕量不小干10dB,试确定系统的串联校正装置。
6-2设一单位反彊系统,貝开坏传递函数为
叭“)=
52(0.25+l)
求系就的稳态加速度误差系数心=10^2和榊位於量不小于35。
时的串取校正装置。
6-3设一单位反饋系统,貝开坏传递函数为
叫($)=亠
s~
要求校正后的开坏頻率特11曲线与M=4dB的等M風松切。
幼点频率®,=3,,并目在高频
目。
>200具有铢敎止・3特性,试确定校正装置。
6・4设一单位反彊系躱,貝开坏传递函数为
叫")=$(0.2$+必0.5$+1)
要求具有松位裕量等于45。
及增益裕量等于6dB的性能指标,试分别采用串联引前校正和串
联迟后校正两种方法,孀定枚正装置。
6-5设一胡动系躱,貝开环传i!
函数为
叫(s)=
K
$(0・5$+1)
如要求系竦的速度稳态误差为10%,Mp<1.5,试彌定串联校正装置的参数。
6・6设一单位反债系统,其开坏传递因数力
林($)=
A5(0.15+1X0.001665+1)
要求校正后系统的松位裕量%。
)=40。
±2。
,憎益裕量等于10dB,穿越颉率coc>\rad/s.目开坏增益保持不变,试惭定串联迟后校正装置。
6-7采用反锁校正后的系躱结构如图6・1所示,貝中H(S)为校正芸置,
图6—1
%(s)为校正对象。
要求系统满足下列指标:
梯态位置误差J(s)=O;稳态速度误差
q(s)=0.5%;/(^)>45°0试确定反彊校正装置的参数,并求等效开环传递因数。
%(s)=200
10
(0.015+1X0.15+1)
6-8-系统的结构图如题6・7,要求系统的稳态連度误差系数人=200,超调量》%<20%,闕节时间tx<2s,试确定反馈校正装置的参数,并绘制校正前、后的波徳图,写出校正后的等效开坏传递函数。
7-1一故大装置的非线性特11示于图7-1,求其描述函数。
7-2图7・2为变朋大系数非线性特性,帝具描述因数。
图7-1图7-2
7-3求图7-3»示非线性环节的描述函数。
7・4图7-4给岀几个非线性特性,分别写岀貝基准描述函数公式,并在貝平面上大致画出其基准描述因数的负倒数特性。
——c
-一d
图7-3
图7-4
7-5判斷图7・5两示各系统是否梯定?
一丄与KW(jco)的交点是梯定工作点还是不
稳定工作虑?
图7-5
7-6图7-6W示力地电器控制系竦的结构图,其Stt®分的传递函数为
W(5)=
G+1)(0.5$+1)(0」$+1)
试孀定自持振葫的頫率和瓯
7・7图7-7示为一非我11系筑,用描述因数法分折其稳定性。
图7-6
图7-7
7-8求下列方程的奇点,并倫定奇戌类里。
(1)x-(l-x2)x+x=0
(2)x-(0.5-3x2)i+x+x2=0
7-9利用等料线建酉出下列方程的相平面图
(1)x+\x\+x=0
(2)x+x+\x\=0
7-10系筑示干图7・8,设系统原始条件是静止狀态,试绘制fflttilo貝系锐输人为
(1)Xr{t)=A.A>ee
(2)xr(t)=A+Bt,A>ee
7-11图7・9为变熄益非裁性控制系统结构图,耳中K=l,k=0.2,e°=l,并目参数
満足如下关系
1t1
—;=<1<
2>]KT2/kKT
试绘制输人量为
(1)Xr{t)=A,A>ee
(2)xr(t)=A+Bt,A>ee
W,tte-e为坐标的
图7-8
(a)
(b)
图7-9
信息学院年研究生入学试题启沏控罠原理试題(B卷)答案
一、1.(10分)
(3分)
(3分)
(1分)
/0(5)=/1(5)
所以叫)/(处注)(3分)_凡
2.(10分)令Xf)=0
(5分)
枠)=坐=(严+怦吟一巴少比艸-艸)(5分)\7N(s)\4I-"1+W;冬函1+叫%1匕
二、(15分)
10
(3分)
s(s+l)_10
1+-^(0.5s+1)—"+6s+1°s(s+\y7
^=710=3.16,(2分)=6n§三0.95(2分)
=l-3.2e^sin(0.987/+18.19°)(5分)
系统根为^2=Z6±V36-4()
在左半平面,
所以系貌稳定
(3分)
三、(15分)
WK(F+2s+2)
1力=3,«2・3=°
加=2,乙.2=—1土丿
7?
-777=1(2分)
2浙进线1条兀(1分)
3人射用%=1&)。
+工极0-工00
=180。
+(135。
+135。
+135°)-90°=360°+135。
=135°
同理%=—135。
(2分)
4与虚轴交点,特方$3+k〃+2K$+2=0(1分)
53
1
2K
K
2
s1
2K2-2
K
2
2K_2=0_k=1(2分)
K/+2=0
5=±5/2J(2分)
所以当K>1时系貌稳定,临界状态下的震葫颛率为°=血(1分)
-135°
9(4分)
四、(15分)
Wk=
1(斥+1)(亦一1)
0(^?
)=-arctgcoT-7T+arctgcor(2分)
K
北(问)=/・丁八/・——
(丿诃+1)(砂_1)
_K(何_1)(胁+1)
一(1+^y(-i)・(i+/T)
K(jcoT-1)(j7yr+l)
-(l+6y2T2)(l+6y2r2)
__K(l+/2");Ke(T-2)
=(l+^2)(l+e%2)r(l+")(l+e2F)
PvO,0看丁与卩之间关系
3=0P(e)=_K,0佃)=0
e=8P{co)=o,=o
①当T>tN,P<0,<2>O
—K
(3分)
系貌不稳,右M有两根(1分)
临界稳定(1分)
③当r—K
(3分)
稳定(1分)
五、(20分)
□)=(03)严_八丿(O.O1S+1)(O.1$+1)f±+1Yj_+1lioA100
MB八厶(6?
)
(5分)
(3分)
100(0.255+1)
r(0.015+l)
(2)PA/=180°+)=180°-180°-arctgO.O\coe+arct^.25coe
AM=
所UPM=arctg0.25x25-arctgO.Oix25=80.9°-14°=66.9°(5分)
(3)GM=s(2分)兀、①(10分)
(1)与初始状态有关(2分)
(2)与输人幅憤有关(2分)
(3)能产生自激震葫(2分)
设IN为Asincot
KnAsincot.
Q所以尸
q=arcsin—(4分)
A
②(5分)
 升级会员
升级会员 