我所认识的应力应变关系.docx
《我所认识的应力应变关系.docx》由会员分享,可在线阅读,更多相关《我所认识的应力应变关系.docx(12页珍藏版)》请在冰豆网上搜索。
我所认识的应力应变关系
我所认识的应力应变关系
应力应变都是物体受到外界载荷产生的响应。
物体由于受到外界载荷后,在物体内部各部分之间要产生互相之间的力的作用,由于受到力的作用就会产生相应的变形;或者由于变形引起相应的力的作用。
则一定材料的物体其产生的应力和应变也必然存在一定的关系。
一应力-应变关系
影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量只有一个不为零,六个应变分量只有一个自由变化,应力应变关系图1-1。
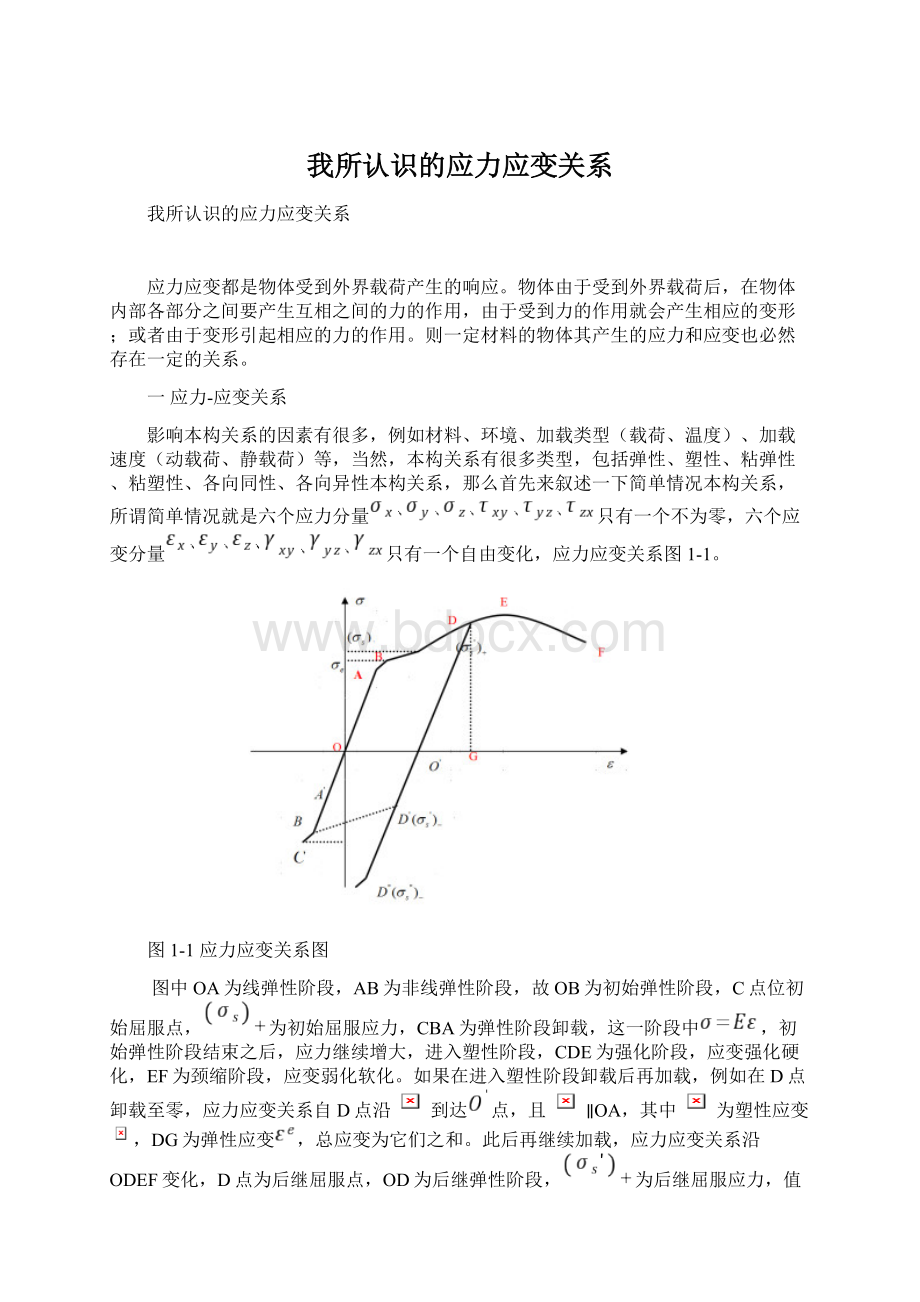
图1-1应力应变关系图
图中OA为线弹性阶段,AB为非线弹性阶段,故OB为初始弹性阶段,C点位初始屈服点,为初始屈服应力,CBA为弹性阶段卸载,这一阶段中,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE为强化阶段,应变强化硬化,EF为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D点卸载至零,应力应变关系自D点沿到达点,且∥OA,其中为塑性应变,DG为弹性应变,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF变化,D点为后继屈服点,OD为后继弹性阶段,为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段,,而在强化阶段,,称为Bauschinger效应。
从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:
弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
因为通常情况下物体不仅仅处于简单应力状态,那么复杂应力状态下应力应变关系又如何呢?
如果我们将材料性质理想化即假设材料是连续的、均匀的、各向同性的,忽略T、t的影响,忽略净水压力对塑性变形的影响,可以将应力应变关系归结为不同的类型,包括理想线弹性模型、理想刚塑性模型、线性强化刚塑性模型、理想弹塑性模型、线性强化弹塑性模型、幂强化模型、等向强化模型、随动强化模型。
各种材料的应力应变关系图如下图所示:
理想线弹性模型理想刚塑性模型
线性强化刚塑性模型理想弹塑性模型
线性强化弹塑性模型幂强化模型
一.线性弹性体
1.线性弹性体本构方程的一般形式
在单向应力状态下,理想弹性材料的应力和应变之间的关系很简单,即,即胡克定律。
如果在三维应力状态下,应力应变之间仍然满足类似的一一对应的关系,则称这类弹性体为线弹性体。
对线弹性体,把单向应力状态下得胡克定律推广到三维应力状态下。
其一般形式为:
(2-1)
式(2-1)可简写为
(2-2)
由于应力张量和应变张量的对称性,弹性张量具有对称性:
、,从弹性应变能密度函数的概念出发,可以证明上述36个常数中,实际上独立的弹性常数只有21个,即。
满足广义胡克定律的线弹性体称为各向异性弹性体,各向异性弹性体是线弹性体的最一般情况。
2.各向同性弹性体的本构方程
各向同性弹性体在弹性状态下,主应力方向与主应变方向重合容易证明。
在主应变空间里,由于应变主轴与应力主轴重合,各向同性弹性体体内任意一点的应力和应变之间满足:
(2-3)
对的影响与对以及对的影响是相同的,即有;和对的影响相同,即,同理有和等,则可统一写为:
(2-4)
所以在主应变空间里,各向同性弹性体独立的弹性常数只有2个。
在任意的坐标系中,同样可以证明弹性体独立的弹性参数只有2个。
3.弹性应变能密度函数
弹性体受外力作用后,不可避免地要产生变形,同时外力的势能也要产生变化。
根据热力学的观点,外力所做的功,一部分将转化为弹性体的动能,一部分将转化为内能;同时,在物体变形过程中,它的温度也将发生变化,或者从外界吸收热量,或者向外界发散热量。
分析弹性体内任一有限部分∑的外力功和内能的变化关系,设弹性体内取出部分Σ的闭合表面为S,它所包围的体积为V。
以δW表示外力由于微小位移增量在取出部分Σ上所作的功,δU表示在该微小变形过程中取出部分Σ的内能增量,δK表示动能增量,δQ表示热量的变化(表示为功的单位),根据热力学第一定律,则有
δW=δK+δU-δQ(2-5)
假设弹性体的变形过程是绝热的,即假设在变形过程中系统没有热量的得失。
再假设弹性体在外力作用下的变形过程是一个缓慢的过程,在这个过程中,荷载施加得足够慢,弹性体随时处于平衡状态,而且动能变化可以忽略不计(这样的加载过程称为准静态加载过程),则根据上式表示的热力学第一定律,外力在变形过程中所做的功将全部转化为内能储存在弹性体内部。
这种贮存在弹性体内部的能量是因变形而获得的,称之为弹性变形能或弹性应变能。
由于弹性变形是一个没有能量耗散的可逆过程,所以,卸载后,弹性应变能将全部释放出来。
以X,Y,Z表示单位体积的外力,,,表示作用在弹性体内取出部分Σ表面上单位面积的内力。
对上述的准静态加载过程,认为弹性体在外力作用下始终处于平衡状态。
外力所做的功W包含两个部分:
一部分是体力X,Y,Z所做的功;另一部分是面力,,所做的功,它们分别为
(2-6)
(2-7)
则:
(2-8)
外力由于微小位移增量在取出部分Σ上所做的功表示为:
(2-9)
将平衡微分方程和静力边界条件代入上式,利用散度定理可得:
(2-10)
因为,所以内能增量为:
(2-11)
定义函数,使之满足格林公式:
(2-12)
把它代入(2-11)有:
(2-13)
表示单位体积的弹性应变能,称之为弹性应变能密度函数(或弹性应变比能函),简称应变能。
对(2-12)取积分,得
(2-14)
假如的具体函数形式能够确定的话,弹性体的应力与应变之间的关系也就完全确定了。
这可表明,弹性应变能密度函数是弹性材料本构关系的另一种表达形式。
假设对有二阶以上的连续偏导数,有式(2-12)可得
(2-15)
式(2-15)为广义格林公式。
将式(2-2)代入广义格林公式得:
(2-16)
即各向异性弹性体独立的弹性常数只有21个。
三.屈服条件
研究材料的塑性特性时,首先要弄清楚材料什么时候进入塑性变形阶段,即什么时候达到屈服。
固体在载荷作用下,最初处于弹性状态,随着载荷逐步增加至一定程度使固体内应力较大的部位出现塑性变形,固体由初始弹性状态进入塑性状态的过程就是初始屈服。
需要找到确定材料初始弹性状态的界限的准则,这个准则就称为初始屈服条件,简称屈服条件。
1.屈服函数与屈服曲面
在简单应力状态下,如前面所述的应力应变关系曲线可知,当固体内部应力达到初始屈服极限时将产生初始屈服。
在复杂应力状态下,一般屈服条件可以表示为应力分量、应变分量、时间t和温度T的函数,它可写成:
(3-1)
不考虑时间效应和接近常温的情况下,时间t和温度T对塑性状态没什么影响,在初始屈服之前,应力和应变之间具有一一对应关系,所以应变分量可以用应力分量表示,因此屈服条件就仅仅是应力分量的函数了,它可表示为:
(3-2)
以应力张量的六个分量为坐标轴,就建立起一个六维应力空间,屈服函数表示应力空间中的一个曲面,即屈服曲面(简称屈服面)。
当应力点位于该曲面之内时(即),材料处于弹性状态;当应力点位于此曲面上时(即),材料由初始弹性开始屈服;如果应力进一步增加,材料进入塑性状态。
假设:
1)材料是初始各向同性的。
屈服函数与坐标的选取无关,它可写成应力张量不变量的函数
(3-3)
或写成主应力的函数
(3-4)
2)平均应力(静水应力)不影响塑性状态。
屈服函数只应与应力偏量的不变量有关,即
(3-5)
或者写成只是应力偏量主值的函数
(3-6)
这个假设对金属材料成立,但对于一些非金属材料,如混凝土、岩石等则不成立。
通过第一个假设,屈服面由六维空间中的一个超曲面简化为三维主应力空间中的一个曲面;通过第二个假设,屈服面简化为一条曲线。
在主应力空间中,固体一点的应力状态可以用一个矢量来描述(图3-5),矢量可写为:
(3-7)
分解成为偏量部分与球量部分有:
(3-8)
有上述第二个假定,与材料的塑性状态无关。
从几何上看与轴的夹角相等,且正交于过原点的一个平面,这个平面的方程为:
(3-9)
这个平面平均应力等于0,习惯称之为平面。
根据第二个假定,在主应力空间中,屈服面必定是一个垂直与平面的等截面的柱面,它的母线与矢量平行。
屈服面是一个等截面的柱面,它在任意垂直与的平面上的投影曲线都是一样的,研究这个柱面的特征,只要研究它在平面上的投影曲线即可,这条投影曲线称为屈服曲线。
图3-5主应力里面的屈服面图3-6π平面的上的屈服曲线
2.常用屈服条件
(1)Tresca屈服条件
1864年,法国人Tresca做了一系列的金属挤压试验来研究屈服条件。
根据实验,他提出假设:
当最大剪应力达到某一极限值时,材料发生屈服。
这个条件称为Tresca屈服条件,也称为最大剪应力条件。
(3-10)
是和屈服有关的材料常数,可由单向拉伸实验或纯剪切实验确定。
(2)Mises屈服条件
Tresca屈服条件在平面上的几何图形是一个正六边形,它的六个顶点是由试验得到的,但是连接这六个点得直线却是假设的,而且Tresca正六边形的角点也给问题的数学处理带来了不便。
在1913年,Mises提出采用一个圆来连接Tresca正六边形的六个顶点可能更加合理,它可以避免由于屈服曲线不光滑而造成的数学困难。
Mises提出的屈服条件为:
(3-11)
其中,C也是和材料性质有关的一个常数。
它可通过实验确定。
若做简单拉伸实验,则材料屈服时有,所以:
(3-12)
若做纯剪实验,则材料屈服时有,所以
(3-13)
对大多数材料,实验证明Mises屈服条件比Tresca屈服条件更接近实验结果。
四.加载条件加载和卸载准则
1.理想塑性材料加载和卸载
由于理想塑性材料的加载面和屈服面总是保持一致,所以,加载函数和屈服函数可以统一表示为:
它们均与塑性变形的大小和加载历史无关。
于是,在荷载改变的过程中,如果应力点保持在屈服面上,即df=0,此时塑性变形可以任意增长,就称为加载。
当应力点从屈服面上退回屈服面内,即df<0,就表示变形状态从塑性变为弹性,此时不产生新的塑性变形,称为卸载。
理想塑性材料的上述加载和卸载准则,可以用数学形式表示为
(弹性状态)
(加载)
(卸载)
2.强化材料加载、卸载
即(加载)
即(中性变载)
即(卸载)
五.塑性本构关系
各种描述塑性变形规律的理论大致可以分为两大类,即增量理论和全量理论。
增量理论建立了塑性状态下塑性应变增量与应力及应力增量之间的关系,属于这类理论的主要有:
Levy-Mises理论和Prandtl-Reuss理论。
全量理论则建立了塑性状态下应力全量与应变全量之间的关系,属于这类理论的主要有:
1924年Hencky提出的不考虑弹性变形和材料强化的理论;1938年Nadai提出的考虑有限变形和材料强化,但总变形中仍不计弹性变形的理论;1943年依留申提出的考虑弹性变形和材料强化的理论。
1.增量理论
两个常用的增量理论:
Levy-Mises理论和Prandtl-Reuss理论。
a.Levy-Mises理论:
Levy在1871年提出假设,即应变张量各分量与相应的应力偏量各分量成比例(VonMises在1913年又独立地提出)。
数学形式表示为:
(4-1)
式中的比例系数取决于质点位置和载荷水平。
最后可推得
(4-2)
其中为应变增量强度,
(4-3)
适用于理想刚塑性材料,即不考虑弹性变形
b.Prandtl-
 升级会员
升级会员 