课程设计说明书牛头刨床.docx
《课程设计说明书牛头刨床.docx》由会员分享,可在线阅读,更多相关《课程设计说明书牛头刨床.docx(15页珍藏版)》请在冰豆网上搜索。
课程设计说明书牛头刨床
课程设计说明书—牛头刨床
1.机构简介
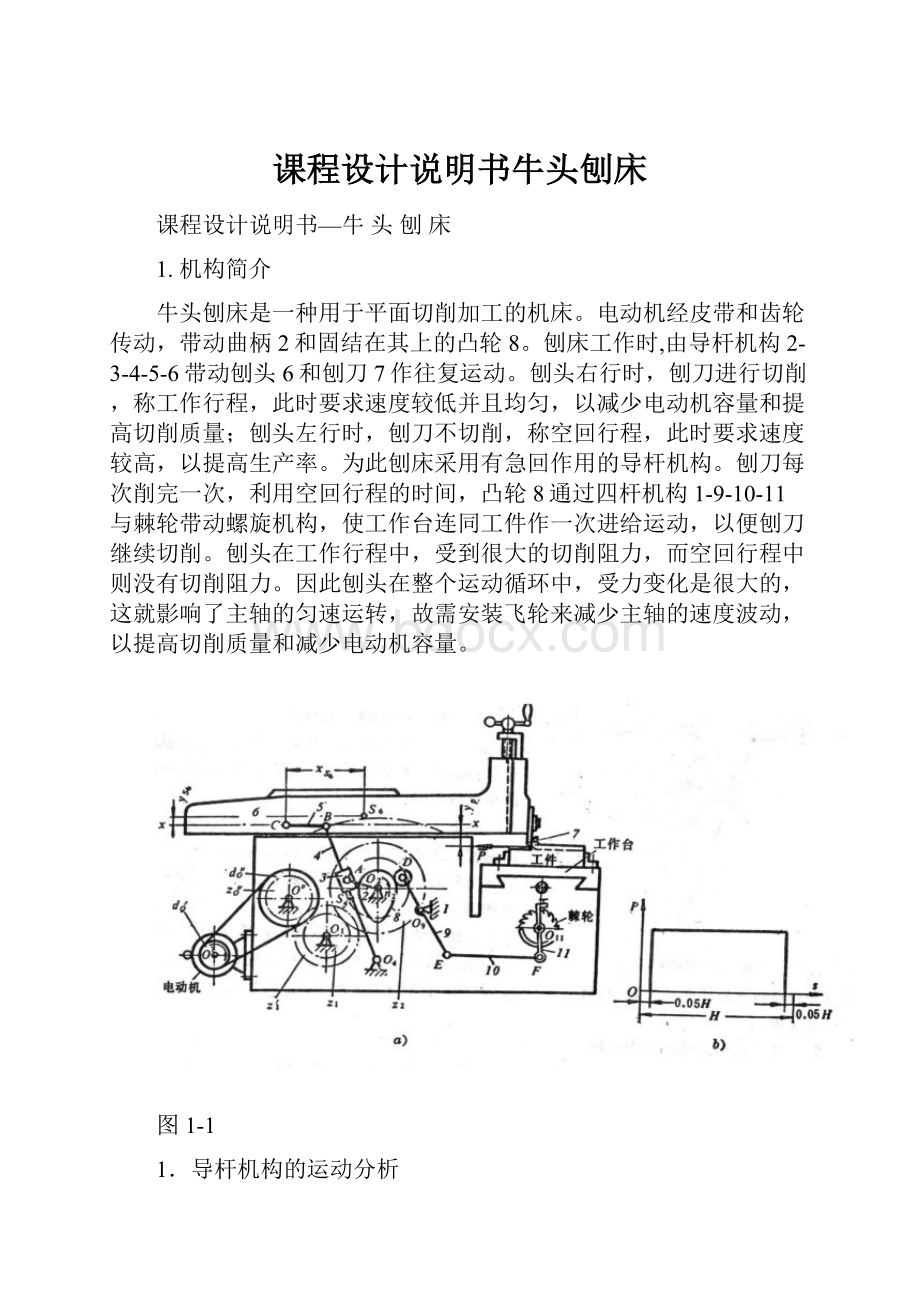
牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。
图1-1
1.导杆机构的运动分析
已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
1.1设计数据
牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作切削。
此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用急回作用得导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。
设计
内容
导杆机构的运动分析
导杆机构的动态静力分析
符号
n2
L0204
L02A
L04B
LBC
L04S4
XS6
YS6
G4
G6
P
YP
JS4
单位
r/min
mm
N
mm
kgm2
方
案
Ⅰ
60
380
110
540
0.25
L04B
0.5
L04B
240
50
200
700
7000
80
1.1
Ⅱ
64
350
90
580
0.3
L04B
0.5
L04B
200
50
220
800
9000
80
1.2
Ⅲ
72
430
110
810
0.36
L04B
0.5
L04B
180
40
220
620
8000
100
1.2
1.2曲柄位置的确定
曲柄位置图的作法为:
取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
第五章选择设计方案
1机构运动简图
图1-2
2、选择表Ⅰ中方案Ⅱ
取第方案的第7位置和第12位置(如下图1-3)。
图1-3
2、曲柄位置“7’”速度分析,加速度分析(列矢量方程,画速度图,加速度图)
取曲柄位置“7’”进行速度分析,其分析过程同曲柄位置“1”。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得
υA4=υA3+υA4A3
大小?
√?
方向⊥O4A⊥O2A∥O4B
取速度极点P,速度比例尺µv=0.01(m/s)/mm,作速度多边形如图1-4。
图1—4
则由图1-4知,,υA4=pa4·μv=28.33743629×0.01=0.2833743629m/s
υA4A3=a3a4·μv=53.2477258×0.01=0.532477258m/s
O4A=383.14488122mm
由速度影像定理得υB5=υB4=υA4·O4B/O4A=0.428968617m/s
又ω4=υA4/lO4A=0.739601064rad/s/.
取5构件为研究对象,列速度矢量方程,得
υC5=υB5+υC5B5
大小?
√?
方向∥XX⊥O4B⊥BC
其速度多边形如图1-4所示,有
υC5=
·μv=42.07193291×0.01m/s=0.4207193291m/s
υC5B5=
·μv=9.74202042×0.01m/s=0.0974202042m/s
ωCB=υC5B5/lCB=0.0974202042/0.174rad/s=0.559886229rad/s
取曲柄位置“7’”进行加速度分析,分析过程同曲柄位置“1”.取曲柄构件3和4的重合点A进行加速度分析.列加速度矢量方程,得
aA4=aA4n+aA4t=aA3n+aA4A3k+aA4A3r
大小?
0?
√0?
方向?
B→A⊥O4BA→O2⊥O4B(向右)∥O4B(沿导路)
取加速度极点为P',加速度比例尺μa=0.01(m/s2)/mm,作加速度多边形图1-5
图1-5
则由图1─5知,
aA4t=a4´a4″·μa=277.76598448×0.01m/s2=2.7776598448m/s2
=k´a4´·μa=168.96093044×0.01m/s2=1.6896093044m/s2
α4″=aA4t∕lO4A=2.7776598448∕0.38314488rad/s2=7.249633204rad/s2
aA4=p´a4´·μa=278.55555401×0.01m/s2=2.7855555401m/s2
用加速度影象法求得
aB5=aB4=aA4×lO4B/lO4A=2.7855555401×580/383.14488122m/s2=4.216739653m/s2
又aC5B5n=ω52·lCB=0.5598862292×0.174m/s2=0.05454423m/s2
取5构件的研究对象,列加速度矢量方程,得
aC5=aB5+aC5B5n+aC5B5τ
大小?
√0?
方向∥xx√C→B⊥BC
其加速度多边形如图1─5所示,有
aC5B5t=C5´C5″·μa=64.40968945×0.01m/s2=0.6440968945m/s2
α5″=
/lCB=0.6440968945/0.174rad/s2=3.701706287rad/s2
aC5=p´C5´·μa=413.17316272×0.01m/s2=4.1317316272m/s2
1、曲柄位置“12”速度分析,加速度分析(列矢量方程,画速度图,加速度图)
取曲柄位置“12”进行速度分析。
因构件2和3在A处的转动副相连,故VA2=VA3,其大小等于W2lO2A,方向垂直于O2A线,指向与ω2一致。
ω2=2πn2/60rad/s=6.70rad/s
υA3=υA2=ω2·lO2A=6.70×0.09m/s=0.603m/s(⊥O2A)
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得
υA4=υA3+υA4A3
大小?
√?
方向⊥O4A⊥O2A∥O4B
取速度极点P,速度比例尺µ1=0.01(m/s)/mm,作速度多边形如图1-2
图1-2
则由图1-2知,υA4=
·μ1=32.28002512×0.01m/s=0.3228002512m/s
υA4A3=
·μ1=51.2913961×0.01m/s=0.512913961m/s
用速度影响法求得,
υB5=υB4=υA4×O4B/O4A=0.3228002512×580/293.47849337m/s=0.637948435m/s
又ω4=υA4/lO4A=0.3228002512/0.29347849337rad/s=1.099911096rad/s
取5构件作为研究对象,列速度矢量方程,得
υC5=υB5+υC5B5
大小?
√?
方向∥XX⊥O4B⊥BC
取速度极点P,速度比例尺μ1=0.01(m/s)/mm,作速度多边行如图1-2。
则由图1-2知,υC5=
·μ1=62.30007022×0.01m/s=0.6230007022m/s
υC5B5=
·μ1=14.36557333×0.01m/s=0.1436557333m/s
ωCB=υC5B5/lCB=0.1436557333/0.174rad/s=0.82560766rad/s
2.加速度分析:
取曲柄位置“12”进行加速度分析。
因构件2和3在A点处的转动副相连,
故
=
其大小等于ω22lO2A,方向由A指向O2。
ω2=6.70rad/s,
=
=ω22·LO2A=6.702×0.09m/s2=4.04m/s2
取3、4构件重合点A为研究对象,列加速度矢量方程得:
aA4=
+aA4τ=aA3n+aA4A3K+aA4A3r
大小:
ω42lO4A?
√2ω4υA4A3?
方向:
B→A⊥O4BA→O2⊥O4B(向左)∥O4B(沿导路)
取加速度极点为P',加速度比例尺µ2=0.04(m/s2)/mm,
作加速度多边形如图1-3所示
则由图1-3知,aA4τ=A’A4·μ2=112.831951×0.04m/s=4.51327804m/s2,
α4'=aA4τ/LO4A=15.37856486rad/s2
aA4A3r=A3A4·μ2=252.5410172×0.04m/s2=10.10168407m/s2
aA4=P´A4·μ2=458.84456901×0.04m/s2=18.35378276m/s2
用加速度影象法求得aB5=aB4=18.35378276×580/293.47849377m/s2=36.27248411m/s2
又ac5B5n=ωCB2·lCB=0.825607662×0.174m∕s2=0.118603273m∕s2
取5构件为研究对象,列加速度矢量方程,得
ac5=aB5+ac5B5n+ac5B5τ
大小?
√√?
方向∥XX√C→B⊥BC
其加速度多边形如图1─3所示,有
aC5B5τ=B´C·μ2=127.79349011×0.04m/s2=5.111739604m/s2
ac5=p´C·μ2=905.895656×0.04m/s2=36.23582624m/s2
βC5=aC5B5τ/ιCB=5.111739604∕0.174rad/s2=29.37781382rad/s2
第七章.机构运态静力分析
取“12”点为研究对象,分离5、6构件进行运动静力分析,作阻力体如图1─6所示。
图1—6
已知P=0N,G6=800N,又ac=ac5=36.23582624m/s2,那么我们可以计算
FI6=-G6/g×ac=-800/10×36.23582624m/s2=2898.866099N
又ΣF=P+G6+FI6+F45+FRI6=0,作为多边行如图1-7所示,µN=10N/mm。
图1-7
由图1-7力多边形可得:
F45=CD·µN=298.947446×10N=2989.47446N
FR16=AD·µN=87.03987932×10N=870.3987932N
在图1-6中,对c点取距,有
ΣMC=-P·yP-G6XS6+FR16·x-FI6·yS6=0
代入数据得x=1177.555981mm
分离3,4构件进行运动静力分析,杆组力体图如图1-8所示
图1-8
µL=4。
已知:
F54=-F45=2989.47446N,G4=220N
aS4=aA4·lO4S4/lO4A=18.35378276×290/293.47849377m/s2=18.13618026m/s2,
βS4=β4=7.45rad/s2
由此可得FI4=-G4/g×aS4=-220/10×18.13618026N=-398.995965N
MS4=-JS4·αS4=-1.2×7.45N·m=-8.94N·m
在图1-8中,对A点取矩得:
ΣMA=G4×8.5+FI4×72.5+M+F54×144.5-F23×66.5=0
代入数据,得F23=6088.915971N
又ΣF=FR54+FR32+FS4'+G4+FO4n+FO4τ=0,作力的多边形如图1-9所示,µN=10N/mm。
图1-9
由图1-9可得:
F23=CD·µN=608.8915971×10N=6088.915971N
FO4n=CB·µN=281.87752571×10N=2818.7752571N
对曲柄2进行运动静力分析,作组力体图如图1-10所示,
µL=1。
由图1-10可知,
h2=85mm,则,对曲柄列平行方程有,
ΣMO2=M-F42·h2=0即
M-6088.915971×85×10-3=0,即M=517.5578575N·M图1-10
第八章参考文献
1、机械原理/孙恒,陈作模主编——六版——北京2001
2、理论力学Ⅰ/哈尔滨工业大学理论力学研究室编——六版——北京2002.8
3、机械原理课程设计指导书/罗洪田主编——北京1986.10
4、机械原理与课程设计上册/张策主编——北京2004.9
第九章总结
通过本次课程设计,对于机械运动学和动力学的分析与设计有了一个较完整的概念,同时,也培养了我表达,归纳总结的能力。
 升级会员
升级会员 