四翼飞行器设计与实现.docx
《四翼飞行器设计与实现.docx》由会员分享,可在线阅读,更多相关《四翼飞行器设计与实现.docx(12页珍藏版)》请在冰豆网上搜索。
四翼飞行器设计与实现
四旋翼飞行器设计与实现
一、四旋翼飞行器的结构设计
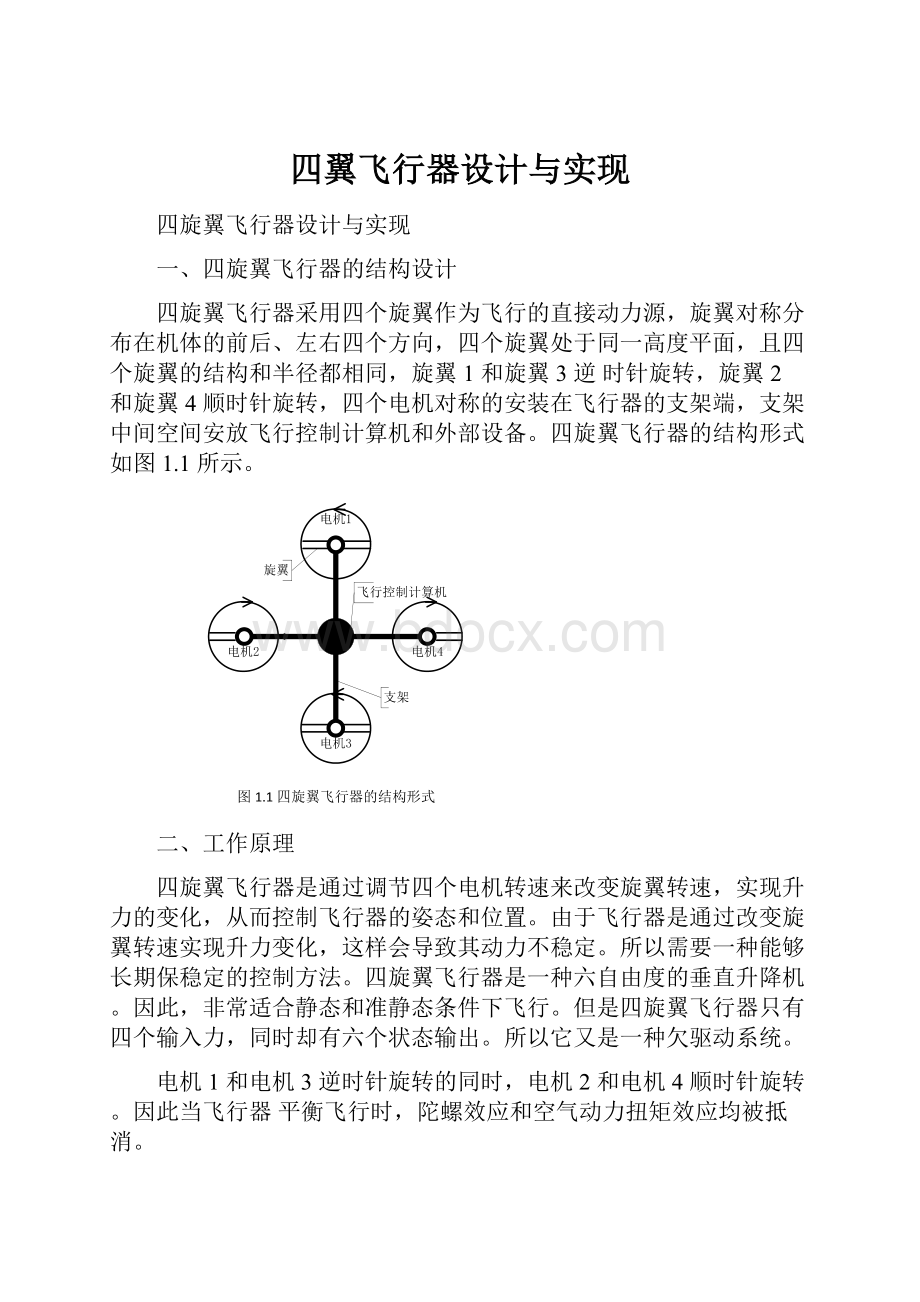
四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
四旋翼飞行器的结构形式如图1.1所示。
二、工作原理
四旋翼飞行器是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定。
所以需要一种能够长期保稳定的控制方法。
四旋翼飞行器是一种六自由度的垂直升降机。
因此,非常适合静态和准静态条件下飞行。
但是四旋翼飞行器只有四个输入力,同时却有六个状态输出。
所以它又是一种欠驱动系统。
电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转。
因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。
基本运动状态分别是:
(1)垂直运动;
(2)俯仰运动;(3)滚转运动;(4)偏航运动;(5)前后运动;(6)侧向运动。
在图(a)中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:
垂直运动相对来说比较容易。
在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩;当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大;当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
保证四个旋翼转速同步增加或减小是垂直运动的关键。
(2)俯仰运动:
在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。
为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速改变量的大小应相等。
由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:
与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。
旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩。
为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的来年各个旋翼转动方向相同。
反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。
在图d中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
(5)前后运动:
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。
在图e中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小;同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。
按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量。
因此可以实现飞行器的前飞运动。
向后飞行与向前飞行正好相反。
当然在图b图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
(6)侧向运动:
在图f中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
四翼的控制规律,如表1所示。
表1四翼飞行器旋翼转速控制规律
旋翼1
旋翼2
旋翼3
旋翼4
升降
+(-)
+(-)
+(-)
+(-)
俯仰/前后
+(-)
0
-(+)
0
横滚/左右
0
+(-)
0
-(+)
偏航
+(-)
-(+)
+(-)
-(-)
+:
加速,-:
减速,0:
hold
三、四翼飞行器组成
图3控制结构图
要实现四轴飞行器的稳定飞行以及各个姿态的控制,需要实现对其姿态的感知,位置和高度的测量以及旋翼动力装置的控制。
要实现操控人员对飞行器的控制,还要实现无线遥控功能。
在四轴飞行器设计中飞行控制器是最基本的组成部分,因此,设计飞行控制器实现对飞行器的控制是本项目的重点之一。
飞行控制器配备各种传感器,以实现对飞行器姿态、高度以及位置的测量;配备微控制器经程序设计实现控制系统核心,对传感器测量数据进行融合计算,根据姿态与位置,结合遥控量实现符合要求的控制输出;实现电机控制接口,根据控制器运算输出对电机转速进行控制,实现合适的转速。
通过测量、运算、输出完成整个闭环控制系统。
1、飞行控制器
微控制器实现对传感器的信号进行采样、处理、计算,得到飞行器的姿态、位置等参数,结合遥控器或者地面控制站的控制信号进行控制算法运算,实现控制量输出。
微控制器应满足控制器运算的速度与存储容量的要求。
2、传感器
1)角度传感器(ADXL202)
主要是测量飞行器当前姿态,传感器的响应速度要求。
2)角速度陀螺仪传感器(日本murata公司ENC系列产品)
加入此传感器可以对飞行器动作产生阻尼,保持当前姿态,则可以在增稳系统中加入角速度陀螺仪。
日本村田公司生产的ENC-03M是应用科里奥利力原理而制造的角速度传感器。
在飞行控制器的电路设计中,使用了3片ENC-03M组成一个3轴电子陀螺仪传感器模块,用于测量三个轴向的角度。
在最终的电路板上,三片传感器呈两两垂直的角度,沿空间坐标系的三个轴向安装。
3)高度传感器
用于测量飞行器离地面的高度,可采用测量空气气压的方法间接测量海拔高度。
气压作为一个物理量,其大小具有很深刻的物理含义,与海拔高度之间存在着密切的关系。
采用BOSCH公司的BMP085数字气压传感器作为测量海拔高度的传感器
3、无线遥控模块(可买现成的模块即可)
4、电源模块
采用大容量的锂电池供电。
由于电机、电子调速器、传感器、控制器,无线接收模块需要不同的工作电压。
需要电压转换和稳压、滤波设计。
5、电机与功率驱动模块
采用无刷电机,无刷直流机的转速控制是通过改变电机电枢电压接通时间和通电周期的比例值 (即占空比)来改变平均电压的大小实现的。
每一只电机都需要单独的控制逻辑,对于微控制器来讲无疑质疑中较大的负担,因此在本项目中选用专用的无刷直流电机电子调速器对其转速进行调节,微控制器只需将控制信号给每个电机的电子调速器即可。
四、四翼飞行器的动力模型
1、飞行器姿态解算方程
图4坐标系绕Z轴旋转(偏航角Ψ)
图5坐标系绕Y轴旋转(俯仰角θ)
图6坐标系绕X轴旋转(横滚角φ)
在实际运算中对飞行器的姿态解算采用增量式的方法。
ηn记为第n次解算后的姿态,ηn+1为第n1次时的姿态,Rn为第n次解算时的旋转矩阵,则有以下关系
(1)
由于对角度的采样频率很高,即因此每次解算时飞行器机体转过的角度很小。
当横滚角度,偏航角度以及俯仰角度很小时,旋转矩阵Rφψθ可采用近似值,
(2)
通过陀螺仪进行姿态解算时,可使用增量式运算如下:
(3)
2、动力方程
使用线角速度和角加速度方程描述四轴飞行器的位置和姿态角。
因此控制算法需要实现位置和姿态角的控制。
图6控制结构
由于姿态与位置变量中x、y与φ,θ之间存在耦合关系,因此,在控制器设计时把φ和θ作为间接被控对象,由位置控制环运算输出后,经反解可得到φ和θ作为姿态控制环的输入。
则整个飞行控制器的输入为四元组(x,y,z,ψ),控制器的输出为四元组(u1,u2,u3,u4)。
注:
m:
飞行器的质量kg
Iφ,Iθ,Iψ分别飞行器为绕载体坐标系X,Y,Z 3个坐标轴的转动惯量。
l是四轴飞行器重心到每个旋翼的主轴长度。
1)位置控制
位置控制的控制量有3个:
x,y,z 3个位移变量。
因此设计3个独立的PID控制器进行3个通道的位置控制。
三个通道的控制器输出分别为x,y,z。
(4)
进而可得到姿态控制环的输入
(5)
式(5)反映了姿态与位置之间的耦合关系,通过耦合解算得到u1,θ,φ。
其中θ,
φ与输入四元组中的作为姿态控制环的输入。
飞行器的位置控制结构如图7所示。
图7位置控制结构
2)姿态控制
进行姿态控制时,不考虑姿态角与位移关系的耦合。
其被控量为3轴姿态角度θ,φ,ψ。
分别设计3个独立的PID控制器,其控制器输出分别为θ,φ,ψ。
(6)
(7)
若采用PID控制,则可调整PID控制器的参数,使其包含
项,则姿态控制回路的最终输入飞行控制器的最终输出u对应期望的旋翼升力关系,而旋翼升力对应旋翼的转速。
图8姿态控制结构
控制量与旋翼的升力关系为:
(10)
变换后得到期望的转速
(9)
式(10)求解四轴飞行器的各旋翼期望转速,即对应每个电机的期望转速。
通过微控制器将此期望转速转化为对应的无刷直流电机电子调速器的转速信号,电子调速器将此信号转化为电机的转速,即完成整个控制回路。
扭矩:
M=KMω2
比例系数c:
c=KM/KF
 升级会员
升级会员 