小学组机器人往返跑竞速赛规则.docx
《小学组机器人往返跑竞速赛规则.docx》由会员分享,可在线阅读,更多相关《小学组机器人往返跑竞速赛规则.docx(15页珍藏版)》请在冰豆网上搜索。
小学组机器人往返跑竞速赛规则
小学组-机器人往返跑竞速赛规则
一、比赛场地
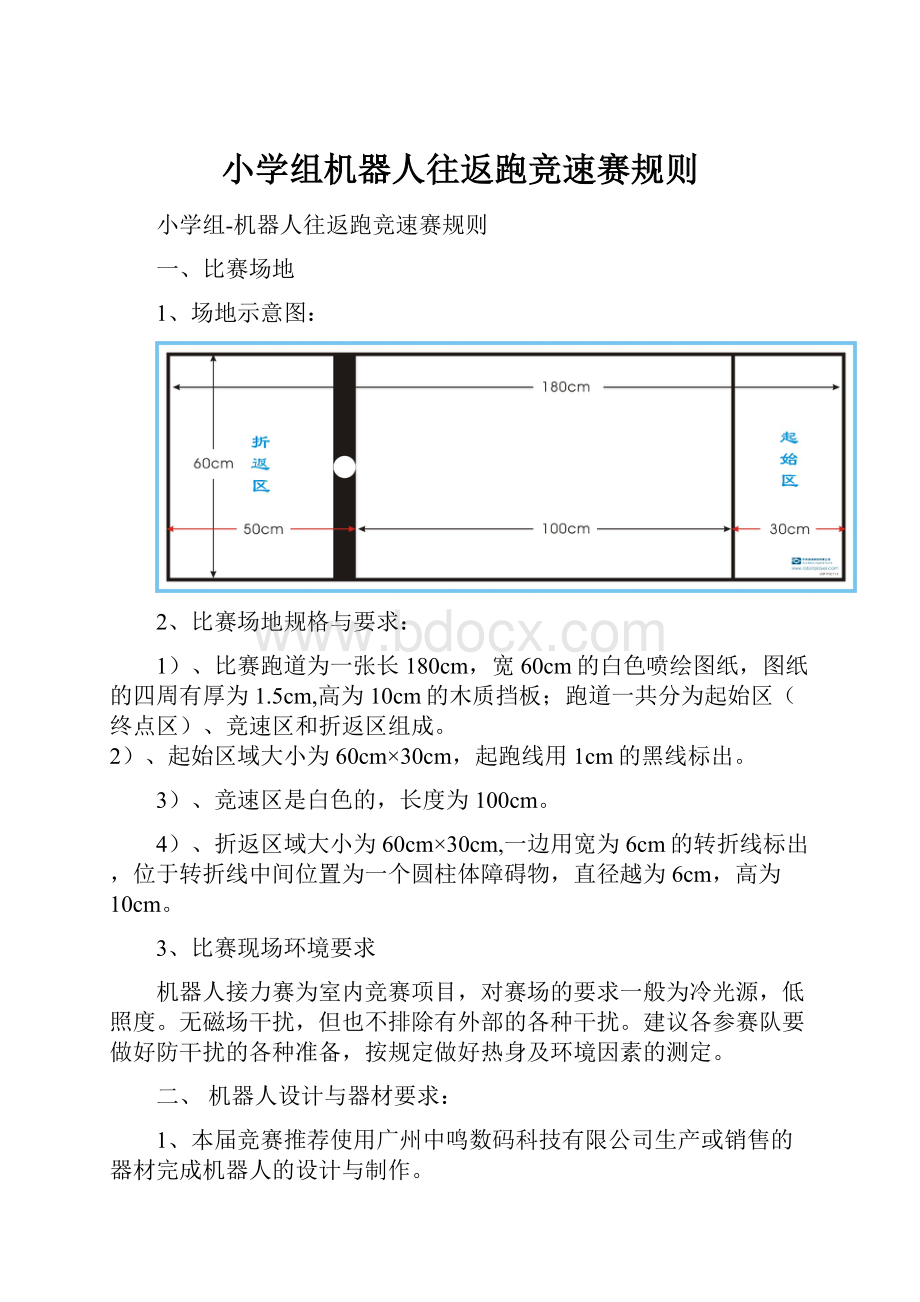
1、场地示意图:
2、比赛场地规格与要求:
1)、比赛跑道为一张长180cm,宽60cm的白色喷绘图纸,图纸的四周有厚为1.5cm,高为10cm的木质挡板;跑道一共分为起始区(终点区)、竞速区和折返区组成。
2)、起始区域大小为60cm×30cm,起跑线用1cm的黑线标出。
3)、竞速区是白色的,长度为100cm。
4)、折返区域大小为60cm×30cm,一边用宽为6cm的转折线标出,位于转折线中间位置为一个圆柱体障碍物,直径越为6cm,高为10cm。
3、比赛现场环境要求
机器人接力赛为室内竞赛项目,对赛场的要求一般为冷光源,低照度。
无磁场干扰,但也不排除有外部的各种干扰。
建议各参赛队要做好防干扰的各种准备,按规定做好热身及环境因素的测定。
二、机器人设计与器材要求:
1、本届竞赛推荐使用广州中鸣数码科技有限公司生产或销售的器材完成机器人的设计与制作。
2、机器人最大尺寸(包括可伸展部分),长20厘米,宽15厘米,高不限。
3、每个参赛队比赛时将使用一个机器人去完成任务,机器人限定使用1个可编程处理器;马达数量不超过2个;传感器不超过2个;其它用于结构搭建的材料不限;每台机器人的电源为标准AA电池,输入电压不超过9伏;机器人部件之间的衔接可以使用胶水、螺丝钉等材料进行固定。
4、各参赛队必须对参赛机器人进行个性化设计,机身上要有明显的本队标志。
5、各代表队须自备竞赛所需的机器人套装器材,并带齐常用工具、电源接线板、转换插头等。
如各代表队有手提电脑推荐自带。
三、任务要求:
1、由一或两名参赛队员设计制作一个竞速往返跑机器人,在3分钟内从起始区出发,从竞速区的一边到达折返区后,绕过中间的圆柱体障碍物,再从竞速区的另一边返回起始区,结束全部任务。
2、机器人在起始区摆放的位置,其身体的任何一部分不得超过起始边线,具体起跑线位置以比赛当日的赛道为准。
3、机器人其身体的任何一部分到达终点区(起始区)即为全部任务结束。
4、参赛机器人必须由参赛队员自行搭建和调试,领队、教练员不得在场外指导。
5、竞赛过程中参赛队员可以控制机器人的启动,机器人起动后,应让其自动运行完成规定任务,参赛队员不得再进行干预。
6、竞赛将采用大循环、三个回合的比赛方式进行,第一回合比赛前,熟悉场地、调整程序、调整结构等准备时间为40分钟;第二、回合比赛前的调整程序、调整结构等准备时间为20分钟。
第三回合比赛从第一、第二两回合比赛中选出成绩最好的前四名队伍以两个队伍为一个小组进行分组淘汰赛,决出前四名。
每个参赛队伍上场比赛前另有1分钟的赛前预备时间。
7、竞赛期间,凡是规则中没有说明的事项由竞裁判委会决定。
四、计分方法:
1、如果完成任务,按照时间计分,时间短者为优胜。
完成任务时间分值为180分(每1秒钟为1个分值,精确到百分之一秒),每提前1秒增加1分。
2、如果没有完成任务,则分步计分
1)机器人由起始区出发顺利经过折返区颜色带——60分
2)机器人顺利绕过折返区并到达折返区另一端颜色带——60分
3)机器人顺利返回起始区——60分
4)机器人触碰转折线中间位置的圆柱体障碍物,每次扣——5分
任务得分的基本要求是:
每项任务的得分必须建立在前一项任务得分的基础上。
3、完成任务超时,则扣除超时占用的负时间分值。
(每1秒钟为1个分值,精确到百分之一秒。
)
4、参赛机器人进行了个性化设计,机身上有明显标志的加30分。
5、竞赛成绩得分相同,以机器人使用电子器件最少,结构设计最好并且重量最轻者(不包含电池)为优胜。
小学组搭建比赛规则
现场搭建规定模型,以搭建时间和准确度来决定比赛成绩。
机器人灭火竞赛规则
一、任务
机器人灭火是模拟现实家庭中机器人处理火警的过程。
制作一个由计算机程序控制的机器人,在一间模拟平面结构的房间里运动,找到一根代表房间里火灾点的正在燃烧的蜡烛并尽快将它扑灭。
二、标准
1.模拟房子平面结构和特性
机器人灭火竞赛的场地平面结构示意图见《规则附件》。
示意图中的尺寸供练习和实践时参考,竞赛场地的实际尺寸与示意图给定尺寸基本相同,但允许有1cm范围内制作误差。
最终竞赛场地以当天现场提供为准。
模拟房间的墙壁高33cm,材质为木板。
墙壁为白色。
竞赛场地地板为黑色的光滑木制表面。
地板允许有接口,但接合处平整并为同样的黑色。
有一些机器人可能采用泡沫、粉末或者其他物质来扑灭蜡烛火焰,所以当每一场竞赛后应清理场地。
不保证每一个机器人在该次竞赛过程中,地板都能保持完全黑色。
竞赛场地模拟房间里的整体地面是水平的,没有斜坡和楼梯。
场地平整度要求:
在不连续区域小于0.3cm水平误差。
房间所有走廊和门框的宽度均不小于46cm。
门框上没有门,在门框所在地面上用一条2.5cm宽的白线表示房间入口和门。
机器人必须从竞赛场地中代表起始位置的白色正方形中开始启动,如示意图中标有“H”的正方形,代表起始位置。
实际竞赛场地并不标记“H”。
代表起始位置的白色正方形为30cm×30cm边长,正方形的对角线交点将设在46cm走廊的纵向中心线上。
参赛选手可以用一些装置来校正机器人在正方形中的位置。
一旦启动,它可以在竞赛场地中向所希望的横向或纵向运动。
2.场地照明
竞赛场地周围的照明等级根据比赛实际场地条件确定。
参赛者在竞赛前将有时间了解场地及周围环境灯光等级。
竞赛期间的照明条件是相对稳定不变的,因此,不会为迁就个别竞赛者的要求进行调整。
机器人灭火竞赛具有一定挑战性的特点之一就在于机器人应能够在一个含不确定照明、阴影、散光等实际情况的环境中运行。
3.机器人
机器人的整体外形尺寸限制在30cm×30cm×30cm之内,包括机器人的触角、探测物及装饰物。
对机器人的重量、制作材料、产品型号等不作限制。
4.蜡烛
蜡烛的火焰代表房间内机器人试图找到并扑灭的火源。
火源的火焰位置有效高度(指火焰底部距场地表面的距离)在15cm至20cm之间,火焰本身高度将控制在2cm至3cm之间。
否则,将会调整或更换蜡烛。
蜡烛是直径1-2cm的白蜡烛。
当蜡烛的火焰位置在上述的有效高度范围内,机器人启动之后,不管此后蜡烛火焰具体高度是多少,要求机器人能发现火焰。
蜡烛被安装在一个7cm(长)×7cm(宽)×3cm(高)的涂了半光泽黄色的木质基座上。
5.传感器
在没有与其他规则和规范有抵触的情况下,对传感器的型号没有限制。
6、电源
竞赛场地提供220V/50HZ交流电源。
7、家具
竞赛场地内有一件模拟家具。
由抽签确定房间号之后,这件模拟家具将摆放在该房间的示意位置。
机器人可以接触模拟家具。
模拟家具是一个不大于12cm直径的涂了半光泽黄色的圆柱,柱高30cm、重大于3公斤。
三、规则
1.机器人运行
机器人一旦启动必须在没有参赛选手的干预下自动控制,即:
机器人必须是由计算机程序控制,而非人工现场控制。
机器人在运行过程中可以碰撞或接触墙壁,但是不能标记和破坏墙壁。
当机器人经过竞赛场地时不能把任何东西留在后面,并且不能在竞赛场地留下任何可以帮助它运行的标记。
如果裁判认为机器人编制的程序是在故意冲撞竞赛场地(包括墙壁和模拟家具),该机器人将被取消参赛资格或成绩。
机器人搜救:
在高中组比赛中,将列入搜救模式及回家模式。
机器人灭火后才能进行搜救。
搜救对象放在火源房间中。
在房间中靠墙壁,有一条内侧直径为15cm、半圆形、宽2.5cm的白线,搜救对象是一个位于半圆圆心位置的白色竖立的胶卷盒。
机器人在进入白圈后,必须做出搜救动作,拾起胶卷盒(完全离开地面)并离开房间才算作有效搜救。
在“回家”途中如果搜救对象没有被携带或中途丢失,回家模式失败。
2.熄灭蜡烛
机器人不能运用任何破坏性的或危险的方法来扑灭蜡烛。
它可以运用水、空气、CO2等物质,或者使用机械方式,但是禁止使用任何危险的或可能破坏竞赛场地的方法或物质。
比如,不能通过燃放爆竹产生冲击来使蜡烛熄灭,也不能通过碰倒蜡烛而使蜡烛熄灭。
蜡烛在燃烧时不允许被撞倒。
如果机器人在进行灭火动作的过程中碰撞蜡烛,机器人运行成绩仍然有效。
如果蜡烛被撞倒,按未完成灭火任务处理。
机器人扑灭蜡烛的过程中所产生的杂物,例如:
水、发酵粉、生奶油等遗留物,将在该次竞赛之后的间歇时间由裁判进行清理。
机器人在开始灭火动作时,必须完全进入蜡烛所在房间(即:
机器人在地面的垂直投影全部越过房间门口地面的白线,而不是在线外或者踩在线上),并且机器人必须有部分或全部到达距离火焰30cm的圈以内。
3.蜡烛位置
由抽签确定房间号,蜡烛将摆放在该房间的示意位置。
在机器人所经历的三次比赛中,蜡烛不会放在相同的房间里。
4.传感器
禁止参赛选手在模拟房间的墙面或地面放置任何标记、“灯塔”或反射物来帮助机器人导航。
竞赛场地周围灯光可能是具有红外线、可见光和紫外线的光源,如果机器人使用光传感器找蜡烛或探测墙壁和模拟家具,设计者应采取措施避免这些光源对它的影响。
5.安全
如果现场裁判认为机器人的行为对人员或设备有危险或可能有危险,现场裁判员可以随时终止竞赛。
参赛机器人不能使用任何易燃易爆物质。
四、竞赛
1.竞赛方式
(1)在小学组竞赛中,蜡烛将随机放在四个房间中,不采用回家模式。
(2)在初中组竞赛中,蜡烛将随机放在四个房间中,必须采用回家模式。
(3)在高中组竞赛中,蜡烛将随机放在四个房间中,完成灭火任务之后,须完成搜救模式和回家模式。
2.竞赛顺序
参赛选手和所制作的机器人通过抽签确定参加竞赛的先后次序。
竞赛顺序一旦排好不再改变。
因每轮所有参赛队完成竞赛所需时间的不确定,每一轮竞赛开始的时间不固定。
所有机器人必须按照规定的顺序进行比赛。
在所有机器人第一轮比赛结束后再开始下一轮的比赛。
在两轮比赛之间,参赛选手可以调整和修理机器人,但不允许更换机器人。
前一个机器人比赛时,后一个参赛选手应做好准备工作,等待裁判员点录。
每个队员有2分钟时间进入赛场准备,准备工作完毕后示意裁判。
2分钟内没有准备好的机器人将丧失这一轮比赛资格并被记录为一次无成绩,但不影响参加下一场比赛。
队员进入比赛场地,进行2分钟调试和适应场地后,由队员将机器人放置在起始位置,并将启动方法告知裁判。
然后抽签确定任务房间,由裁判员启动机器人。
三轮比赛抽出的房间不会相同。
3.时间限制
机器人需在3分钟内找到并熄灭蜡烛。
在3分钟之后仍未扑灭蜡烛火焰,裁判将终止该参赛选手及机器人的该轮比赛,灭火成绩按照3分钟记录。
对于初中组比赛,机器人回家模式的最长时间是4分钟。
熄灭蜡烛后开始计时,超过限定时间仍未完成回家任务的机器人,裁判将终止该轮比赛。
回家时间按照4分钟记录。
对于高中组比赛,机器人要求依次完成灭火、搜救和回家任务。
搜救时间从熄灭蜡烛开始计时,直到机器人拾取了搜救对象,并且离开蜡烛和搜救对象所在的房间时为止。
搜救模式的最长时间为3分钟。
如果机器人3分钟内没有完成搜救任务,裁判将终止比赛。
搜救成绩按照3分钟记录,同时按照4分钟来记录回家成绩。
回家模式从机器人离开搜救对象所在房间开始计时,直到机器人回到“家”为止,机器人回家模式的最长时间是4分钟,超过这个时间,裁判将终止比赛,按4分钟记录成绩。
4.停表
仅在两种情况下停表:
(1)超出相应任务最大时间限度;
(2)队员请求停表终止本轮比赛。
5.本轮比赛终止
比赛中由于各种情况没有完成所有规定任务而提前结束的比赛,称为比赛终止。
五、评分标准
1.得分
(1)每轮得分=实际时间×启动模式系数×房间系数×搜救系数(高中组)×回家系数(初中、高中组)。
(2)在本次竞赛中,每个参赛选手有三轮比赛机会。
最终成绩取三次得分中两次好的得分相加后乘以可靠性系数。
最终以得分最低的机器人为胜出,该机器人制作者为优胜者。
2.运行模式
对于所有机器人灭火竞赛,得分越低,成绩越好。
(1)标准启动:
机器人靠人工按钮启动。
标准启动模式得分系数是1.0。
(2)声音启动:
机器人不是由人工按按钮来启动,而是接收到声音信号后启动为声音启动模式。
裁判员通过声音信号来启动机器人。
如该机器人因检测到干扰的噪声而被错误启动,可重新启动机器人。
裁判员发出一次声音信号后,机器人在5秒钟之内未启动,视为该轮比赛结束。
比赛中的发声器由参赛队员自备。
声音启动模式的得分系数是0.9。
(3)搜救模式:
高中组的机器人熄灭蜡烛后,开始进行搜救。
机器人在开始搜救前,将搜救对象撞出或带出搜救区域,搜救模式失败,本轮比赛结束;机器人拾起搜救物后,在行走过程中,搜救物掉落,搜救模式失败,本轮比赛结束;机器人走出搜救对象所在房间,但未能携带搜救对象或超过规定搜救时间,搜救模式失败,本轮比赛结束。
搜救模式成功后,搜救系数是0.6。
(4)回家模式:
对于高中组要求完成灭火和搜救任务后,才能回“家”,即:
回到代表起始位置的区域内。
在回家路上不能进到任何房间里,进入房间的判断标准是机器人全部越过白线进入房间。
回家途中进入房间的机器人判定为回家失败。
机器人的任何一部分进入代表起始的位置内,并停止运动,就认为机器人完成回家模式。
如果机器人进入起始位置而未停止动作,不能算完成回家模式。
如果机器人没有回到起始的位置内或回家时间超过4分钟,该机器人就不能被视作完成了回家模式。
回家模式的得分系数是0.8。
3.房间系数
为了使竞赛更具真实性及鼓励创造更聪明的机器人,增加竞赛过程的不确定性,减少运气成分的影响,引入了房间系数。
每一轮竞赛中,机器人找到蜡烛前搜索的房间越多,房间系数值越小,得分越少。
(1)搜索1个房间,房间系数为1.0
(2)搜索2个房间,房间系数为0.75
(3)搜索3个房间,房间系数为0.50
(4)搜索4个房间,房间系数为0.30
机器人按什么顺序搜索房间不作要求。
计算房间系数的前提是机器人在完成灭火任务前搜索了几个房间。
没有完成灭火任务不计算房间系数。
机器人一部分越过门框白线进入房间内就视作机器人搜索了该房间。
重复搜索同一个房间,房间系数不被重复计算。
4.实际时间
实际时间为比赛结束裁判员停表时间。
实际时间包括灭火时间、搜救时间(高中组)和回家时间(初中、高中组)的总和。
如果没有完成灭火任务,按照3分钟记录成绩;如果没有完成搜救任务,按照3分钟记录成绩;如果没有完成回家任务,按照4分钟记录成绩。
搜救时间定义为:
从蜡烛火苗被熄灭开始计时,到机器人完全离开搜救对象所在房间为止。
以机器人在地面的垂直投影完全越过房间的白线作为判定机器人离开房间的标准。
回家时间(初中组)定义为:
从蜡烛火苗被熄灭开始计时,到机器人回到代表家的白色区域中,并处于静止状态为止。
回家时间(高中组)定义为:
从机器人离开搜救对象所在房间开始计时,到机器人回到代表家的白色区域中,并处于静止状态为止。
5.可靠性
灭火机器人的可靠性是指三次指定任务都成功。
三次指定任务都成功的可靠性系数为0.9,其他情况为1.0。
六、其他
1.本规则的解释权属于第八届全国中小学电脑制作活动组委会。
2.现场比赛成绩由裁判员确定并由参赛选手当场签字确认,参赛选手确认后不得追诉和更改。
3.参赛选手对于裁判的决定必须服从,如有异议可以书面形式向“竞赛类项目”仲裁委员会申述。
在竞赛现场不得有任何干扰竞赛正常秩序的行为,否则将直接取消参加本次竞赛的资格和成绩。
附:
机器人灭火竞赛场地平面示意图(单位:
cm)
图中红色为火焰,蓝色为家具,黄色为搜救对象所在位置。
抽中房间后蜡烛、家具和搜救对象位置如图中所示。
小学组和初中组的场地没有搜救标识。
每个房间都将保留标识火源的白线。
初中组-机器人搬运赛规则
一、机器人搬运赛场地
1、场地示意图:
2、比赛场地规格与要求
1)、机器人轨迹比赛的场地为一块长2.3米,宽1.1米。
整个场地由起始区、跨栏区、通道区和搬运区等四部分组成。
白色的底板上绘有黑色轨迹线,线宽1.5-2.5厘米。
2)、底板上,有两块面积为20厘米×20厘米的区域,分别为起始区和搬运区,其颜色值处于黑色和白色之间,两个区域的一边绘有黑色的直线,线长20厘米,线宽1.5-2.5厘米。
分别表示起始区的起点线和搬运区的标识线。
搬运区中将会有一个小立体方块(约为5厘米×5厘米×7厘米),作为机器人搬运对象,在搬运区中具体摆放位置以比赛当天为准。
3)、跨栏区由3条平行的,长250mm、宽15-25mm的黑色障碍线组成,线间距为88mm。
(见示意图)
4)、通道区由3对直径为50mm,高为100-150mm的立体圆柱构成的障碍体通道组成,沿轨迹线两边摆放,其跨越轨迹线的距离为250-270mm,每组障碍的间距为125mm。
(见示意图)
3、比赛现场环境要求
机器人接力赛为室内竞赛项目,对赛场的要求一般为冷光源,低照度。
无磁场干扰,但也不排除有外部的各种干扰。
建议各参赛队要做好防干扰的各种准备,按规定做好热身及环境因素的测定。
二、机器人设计与器材要求:
1、本届竞赛推荐使用广州中鸣数码科技有限公司生产或销售的器材完成机器人的设计与制作。
2、机器人最大尺寸(包括可伸展部分),长25厘米,宽20厘米,高不限。
3、每个参赛队比赛时将使用一个机器人去完成任务,机器人限定使用1个可编程处理器;马达仅能够使用直流电机、数量不超过3个;传感器数量不超过4个;其它用于结构搭建的材料不限;每台机器人的电源为标准AA电池,输入电压不超过9伏;机器人部件之间的衔接可以使用胶水、螺丝钉等材料进行固定。
4、各参赛队必须对参赛机器人进行个性化设计,机身上要有明显的本队标志。
5、各代表队须自备竞赛所需的机器人套装器材,并带齐常用工具、电源接线板、转换插头等。
如各代表队有手提电脑推荐自带。
三、任务要求:
1、设计制作一个机器人,在3分钟内从起点区出发,沿轨迹线分别越过跨栏区和通道区,到达搬运区后搬运位于搬运区内的方块后,再返回起始区,结束全部任务。
2、机器人在起始区摆放的位置,其身体的任何一部分不得超过起始边线。
3、机器人其身体的任何一部分到达终点区即为全部任务结束。
4、机器人如果在搬运赛过程中脱离轨迹运行,则为任务失败,不再记录当次的比赛成绩。
5、当裁判宣布机器人违规运行时,操作员必须立刻停止机器人。
6、参赛机器人必须由参赛队员自行搭建和调试,领队、教练员不得在场外指导。
7、竞赛过程中参赛队员可以控制机器人的启动,机器人起动后,应让其自动运行完成规定任务,参赛队员不得再进行干预。
8、竞赛过程中参赛队员不能增加、删除、变更机器人的软硬件,如需加固硬件或调整程序须经裁判员同意。
9、竞赛将采用大循环、三个回合的比赛方式进行,第一回合比赛前,熟悉场地、调整程序、调整结构等准备时间为40分钟;第二、第三回合比赛前的调整程序、调整结构等准备时间为20分钟。
参赛队伍上场比赛前另有1分钟的赛前预备时间。
10、竞赛期间,凡是规则中没有说明的事项由竞裁判委会决定。
四、计分方法:
1、如果完成任务,按照时间计分,时间短者为优胜。
完成任务时间分值为180分(每1秒钟为1个分值,精确到百分之一秒),每提前1秒增加1分。
2、如果没有完成任务,则分步计分
1)机器人由起点出发顺利经过跨栏区——30分
2)机器人顺利通过通道区——30分
3)机器人顺利到达搬运区——30分
4)机器人成功搬运方块并顺利通过通道区——60分
5)机器人成功搬运方块顺利通过跨栏区并到达起点区——30分
6)机器人触碰通道两旁的圆柱体,每次扣——5分
任务得分的基本要求是:
每项任务的得分必须建立在前一项任务得分的基础上。
3、完成任务超时,则扣除超时占用的负时间分值。
(每1秒钟为1个分值,精确到百分之一秒。
)
4、参赛机器人进行了个性化设计,机身上有明显标志的加30分。
5、竞赛成绩得分相同,以机器人使用电子器件最少,结构设计最好并且重量最轻者(不包含电池)为优胜。
 升级会员
升级会员 