台式电风扇的摇头机构机械原理说明书.docx
《台式电风扇的摇头机构机械原理说明书.docx》由会员分享,可在线阅读,更多相关《台式电风扇的摇头机构机械原理说明书.docx(13页珍藏版)》请在冰豆网上搜索。
台式电风扇的摇头机构机械原理说明书
.
1.设计题目
设计台式电风扇的摇头机构,使电风扇作摇头动作(在一定的仰角下随摇杆摆动)。
风扇的直径为300mm,电扇电动机转速n=1450r/min,电扇摇头周期t=10s,电扇摆动角度ψ=95°、俯仰角度φ=20°与急回系数K=1.025。
风扇可以在一定周期下进行摆头运动,使送风面积增大。
2.设计要求
⑴.电风扇摇头机构至少包括连杆机构、蜗轮蜗杆机构和齿轮传动机构三种机构。
⑵.画出机器的运动方案简图与运动循环图。
拟订运动循环图时,执行构件的动作起止位置可根据具体情况重叠安排,但必须满足工艺上各个动作的配合,在时间和空间上不能出现干涉。
⑶.设计连杆机构,自行确定运动规律,选择连杆机构类型,校核最大压力角。
⑷.设计计算齿轮机构,确定传动比,选择适当的摸数。
⑸.编写设计计算说明书。
⑹.学生可进一步完成机器的计算机演示验证和凸轮的数控加工等。
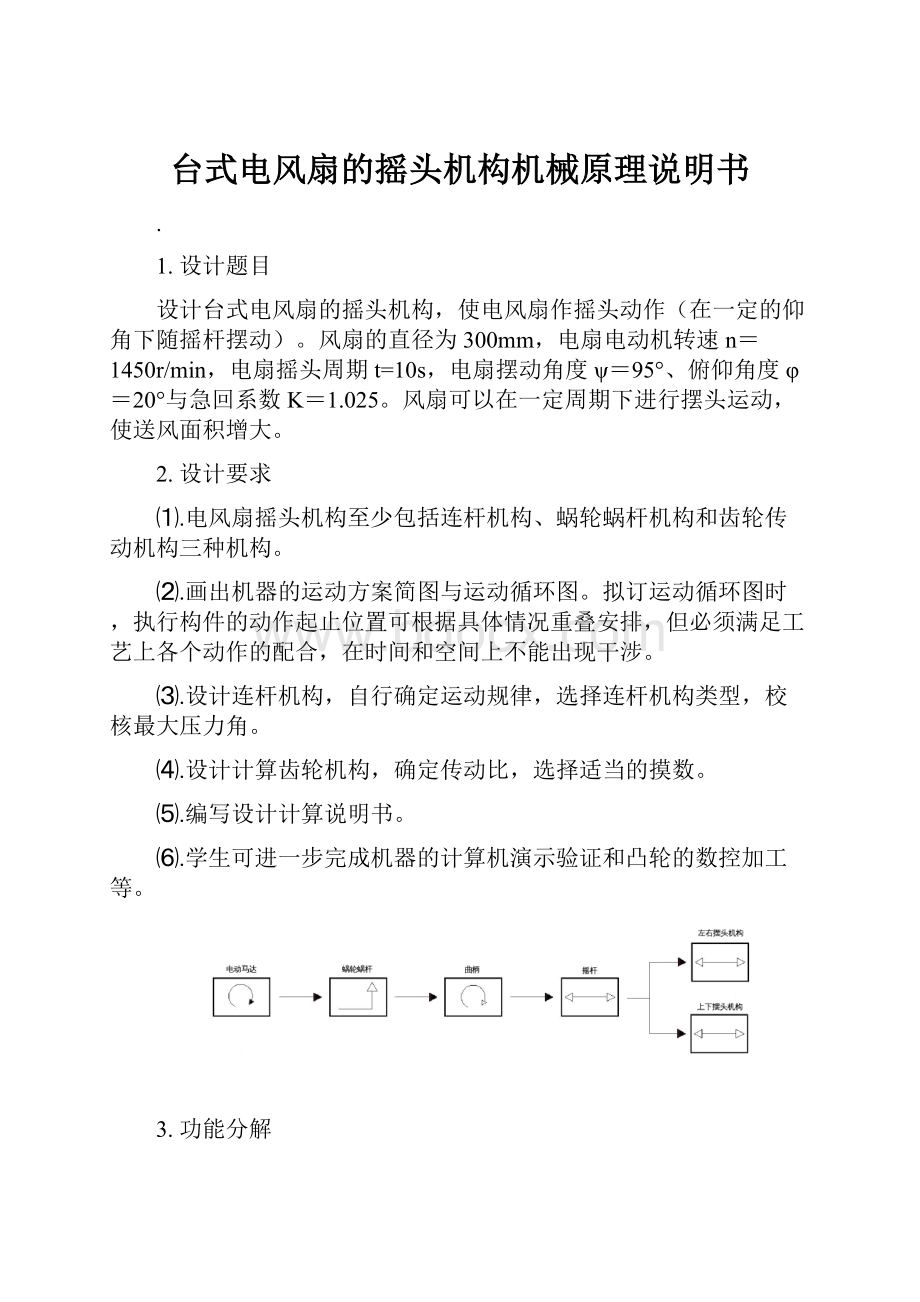
3.功能分解
电风扇的工作原理是将电风扇的送风区域进行周期性变换,达到增大送风区域的目的。
显然,为了完成电风扇的摆头动作,需实现下列运动功能要求:
⑴.风扇需要按运动规律做左右摆动,因此需要设计相应的摆动机构。
⑵.风扇需要按路径规律做上下俯仰,因此需要设计相应的俯仰机构。
⑶.风扇需要转换传动轴线和改变转速,因此需要设计相应的齿轮系机构。
对这两个机构的运动功能作进一步分析,可知它们分别应该实现下列基本运动:
'.
.
左右摆动有三个基本运动:
运动轴线变换、传动比降低和周期性摆动。
⑴.俯仰运动有两个基本运动:
运动方向变换和周期性俯仰。
⑵.转换运动轴线和改变传动比有一个基本动作:
运动轴线变换。
⑶.此外,还要满足传动性能要求:
°的要求下,、摆动角度Ψ=95改变电风扇的送风区域时,在急回系数K=1.025尽量保持运动的平稳转换和减小机构间的摩擦。
3.1运动功能图图
运动循环图图3.2
机构选用4.
且在工作周期中有急回特电风扇的应作绕一点的往复摆动,根据前述要求,页中的设16性。
驱动方式为电机驱动,利用《机械原理课程设计指导书》中第计目录,分别选择相应的机构,以实现这三个机构的各项功能,见表一。
电风扇摆头的机构选形表一0功能执行机构工艺动作执行机构设计矩阵
A左右摆动连杆机构急进急回往复运动齿轮机构连杆机构1'.
.
上下摆动连杆机构扇形往复运动连杆机构~A2
4.1电风扇左右摆头机构
考虑到用电动机驱动、而且空间比较狭小,又需要的三个基本动作和高传动
比要求。
转换运动轴线与改变传动比机构(蜗轮蜗杆与行星轮系组合而成的齿轮箱)a和a。
优点是在较小空间内可以运动轴线变换,且有自锁功能。
为了能2432实现上下、左右往复运动,在经济简单的原则下选择双摇杆机构(a),实现运43动方向交替交换。
综上,整个电风扇左右摆头机构A={aaa}。
4332241,,4.2电风扇上下仰俯机构
考虑到能实行仰俯运动,事先计划使用(凸轮机构)a设计仰俯机构,但11由于电扇的机壳大小有限,并且凸轮只常使用在低负载的传动过程,假如当电风扇的机头被某重物压住,则很容易损坏凸轮。
所以,改变成方案二使用A={a}332(连杆滑块机构)设计。
将机壳引出杆使用一条路径导轨进行约束,来完成设想的仰俯运动。
5.运动方案及选择
5.1左右摆动方案一(放弃):
图5.1左右摆头方案一机构简图'.
.
图5.2左右摆头方案一机构立体视图
该方案主动件有两个,一个单独带动风扇扇片转动,另几个则为上图带箭头的圆盘做整周回转带动机头左右摆动。
机构分解:
总体传动——四杆机构(曲柄摇杆机构)
曲柄:
图5.2中圆盘转动中心到上表面连结处
摇杆:
机头所在直线
摇杆:
连接机头和转盘
优点:
机构简单,主动件为连架杆便于计算四杆机构参数
缺点:
需要两个主动力即需要两个电机驱动
5.2左右摆动方案二(放弃):
图5.2.1左右摆动方案二机构简图
'.
.
图5.2.2左右摆动方案二立体图
该设计方案采用了齿轮箱改变输入输出速度、涡轮蜗杆用于减速并转换速度方向、四杆机构来进行机头的左右摆动并达到急回效果。
机构分解:
减速——齿轮箱及其蜗轮蜗杆机构
左右摆头——四杆机构
优点:
只需要一个主动件即一个电机即可得到风扇转动和机头摆动两种运动。
缺点:
在达到机头左右摆动效果的同时,马达齿轮箱也会自转,达不到预期的效果。
5.3左右摆动方案三(采用):
图5.3.1左右摆动方案三机构简图
'.
.
图5.3.2左右摆动方案三立体图
该方案在方案2的基础上,改变了四杆机构的机架及各杆的位置,消除了其自转,达到扇叶随摇杆左右摆动的效果。
优点:
蜗轮与下面的转盘同轴但可以拉伸,在需要电扇转头时放下蜗轮使其与蜗杆啮合,使蜗杆带动蜗轮转动,带动转头;当不需要转头时,拔起蜗轮即可脱离啮合。
5.4上下摇摆方案
图5.4.1上下摆动方案立体图
'.
.
该方案中,导轨来控制风扇机头的上下摇摆,导轨的形状可以根据要求更改来达到不同的上下摇摆效果,并为了美观将导轨藏于机壳内部。
导轨套在主轴上,不随着机头左右转动,而机头在左右转动时其内部的凸起物受导轨轨迹的约束,带动机头在左右转动的同时随导轨轨迹上下摇摆。
优点:
不涉及复杂机构,提高了可靠性;上下摇摆轨迹可以随要求改变。
5.5比较优缺点即选择
左右摆动方案一:
优点:
机构简单,主动件为连架杆便于计算四杆机构参数
缺点:
需要两个主动力即需要两个电机驱动
左右摆动方案二:
优点:
只需要一个主动件即一个电机即可得到风扇转动和机头摆动两种运动。
缺点:
在达到机头左右摆动效果的同时,马达齿轮箱也会自转,达不到预期的效果。
左右摆动方案三:
优点:
蜗轮与下面的转盘同轴但可以拉伸,在需要电扇转头时放下蜗轮使其与蜗杆啮合,使蜗杆带动蜗轮转动,带动转头;当不需要转头时,拔起蜗轮即可脱离啮合。
上下摆动方案:
此方案机构简单,运动的是外力并非运动机构,所以可靠性比较高,也不易导致质量问题。
5.6最终方案:
左右摆动方案三与上下摆动的结合。
'.
.
最终方案三视图5.6.1图四杆长度的定义:
来估算出曲柄的长度,同K首先定义一个摇杆的长度,再由摆角及行程比系数ll?
ll?
?
得到连时可以由再由图5.6.2且最短杆为连架杆来辅助估算,2minmax1杆和机架的长度以及最小传动角。
表5.6.2
Ψ曲柄长a行程比系数K
机架长d摇杆长c连杆长b最小传动角α序号摆角59.45591.025107.1981108.806112.89.295
52.437530.16441.025212.529.4390959.2
55.8823312.574.833375.7069959.11.025
54.6688959.2119.42281.02520.9299412.5
52.96331.0259.2146.7744512.5546.735695
58.229195.3904612.69596.74709.11.025
55.15129568.99759.21.025712.6169.7103
53.127848.95271.02549.0627812.61959.25
55.424112.629572.2799.21.02571.50109
56.204278.8448
79.4994
1.025
10
12.65
95
9.2
图5.6.3
'.
.
,挑出比例最协调及最小传动直径的扇叶)5.6.2,根据实际情况(30CM观察表b=6.4cm
、a=3cm、d=6.56cm角相对大的第二组数据,并按比例缩放到c=2.72cm、.传动比设计6由于在设计的左右摆头机构中,将蜗轮带动连杆进行整周回转的匀速圆周×лw=2运动。
当蜗轮旋转一周,电扇机壳也正好摇摆一回,得出蜗轮的转速为并且需要改变轴向传由于已知条件电动机转速与蜗轮转速相差较大,/5。
/10=л最因此在设计中运用了能产生较大传动比的蜗轮蜗杆机构与行星齿轮机构。
动,终得出理想的传动比。
6.1行星轮系设计采用一对外行星轮系在一定齿数比的情况下能产生较大的传动比。
设计中,,=1;=33,=18啮合和一对内啮合齿轮构成。
其中为内啮合齿轮,,=1mZZZm2231125mZ。
。
计算得传动比为,;=17,=1=68=1mZ33'2'23
图6.1行星轮系
'.
.
6.2蜗轮蜗杆轮系设计
与行星轮系配合,并考虑电扇机壳的体积大小,蜗轮蜗杆的尺寸不宜过大。
?
?
?
;蜗轮的Z=29=,m=1,αγ18设计中蜗杆的直径为,m=1,α=,859?
02.10420?
?
?
?
,如此,蜗轮蜗杆轮系的传动比i=29,且均为左旋。
、=,β=810?
20.459?
02将两种轮系组合成一个复合轮系,能顺利地符合设计要求,不仅传动的轴向725。
=改变,而且,完成了较大传动比的减速过程,综合两者的传动比,得i总3
7.机构参数计算
7.1双摇杆机构设计
因为使用的是以连杆做主动件的双摇杆机构,区别于日常的设计方法,所以,此次设计我们采用一种新的设计思路——机架转换法。
是机构运动是绝对速度,机架转换法的理论依据如图所示,图一中的V1V2'.
.
后,机架相对于摇杆的相对速度,此时V1=V2。
然后转换机架,将机架转换至图一中的摇杆位置,现在同一位置处,设定图二中的V1=V2。
这样按照图2的机构设计尺寸,所得的尺寸就是实际问题所需要的尺寸长度。
此设计思路,克服了连杆机构以连杆为主动件,连架杆为为从动所产生的难题,通过转换思路,等效运动规律,设计出理想的尺寸长度。
7.2摇杆周期角速度图:
8.设计图纸
(1)方案设计简图
(2)四杆运动规律表
9.参考文献
(1)裘建新.机械原理课程设计指导书.北京高等教育出版社2005
(2)申永胜.机械原理教程(第2版).北京清华大学出版社2005
'.
 升级会员
升级会员 