项目具体技术标准和要求.docx
《项目具体技术标准和要求.docx》由会员分享,可在线阅读,更多相关《项目具体技术标准和要求.docx(16页珍藏版)》请在冰豆网上搜索。
项目具体技术标准和要求
项目具体技术标准和要求
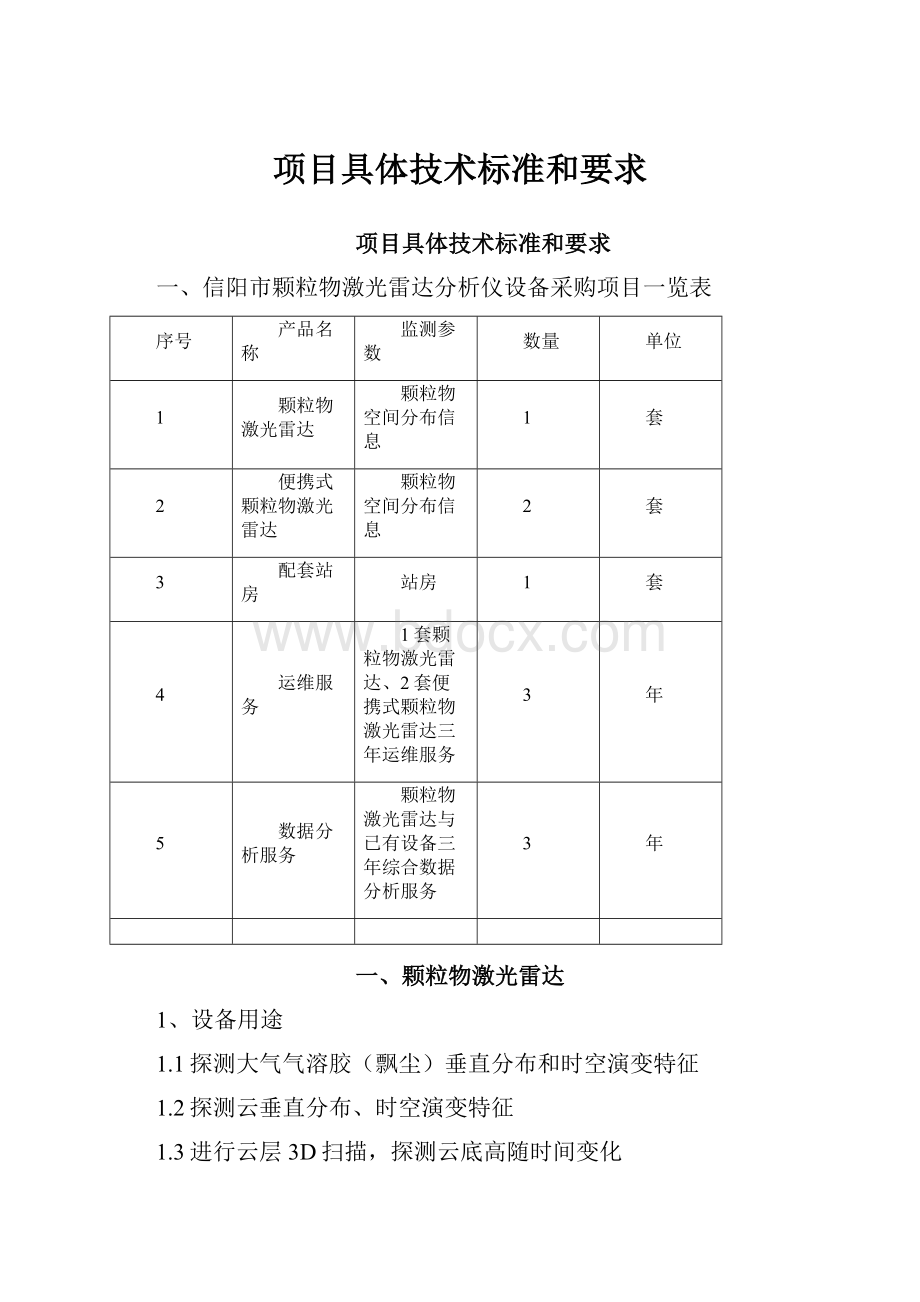
一、信阳市颗粒物激光雷达分析仪设备采购项目一览表
序号
产品名称
监测参数
数量
单位
1
颗粒物激光雷达
颗粒物空间分布信息
1
套
2
便携式颗粒物激光雷达
颗粒物空间分布信息
2
套
3
配套站房
站房
1
套
4
运维服务
1套颗粒物激光雷达、2套便携式颗粒物激光雷达三年运维服务
3
年
5
数据分析服务
颗粒物激光雷达与已有设备三年综合数据分析服务
3
年
一、颗粒物激光雷达
1、设备用途
1.1探测大气气溶胶(飘尘)垂直分布和时空演变特征
1.2探测云垂直分布、时空演变特征
1.3进行云层3D扫描,探测云底高随时间变化
1.4探测大气边界层的结构和时空演变特征
1.5探测颗粒物质量浓度(如PM10)的时空演变特征
1.6大气水平能见度及斜视程能见度
1.7实现非球形粒子与球形粒子的区分探测,识别沙尘、烟尘等非球形粒子(扬沙、沙尘暴监测)
1.8城市边界大气剖面扫描,探测污染输送动态监测,区别局地污染与外部输送
1.9区域污染物快速溯源,进行污染排查和应急监测
1.10区域污染物精准定位,可视化展示污染物水平分布状况
2、性能指标
★2.1为同时保证在垂直及扫描探测等不同应用下都具有良好的时间分辨率,投标产品时间分辨率要求在3s~10min可调(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
★2.2为同时保证在垂直及扫描探测等不同应用下都具有良好的空间分辨率,投标产品空间分辨率要求在5m、7.5m、15m可选(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
★2.3为更全面反应污染物空间分布情况,探测盲区要求小于75m(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
★2.4为实现更大范围的雷达探测,投标产品最大探测高度要求不小于20km(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
2.5雷达主机采用一体化设计,高度集成发射单元、接收单元、数据采集单元。
★2.6所投产品应具有先进性、科学性,所投产品须获得高新技术产品认证(须提供所标产品高新技术产品认证证书复印件并加盖投标人公章,原件核查);
★2.7所投产品应具备独立严格的质量控制方法(须提供质控装置的外观展示及独立知识产权复印件并加盖投标人公章,原件核查);
★2.8所投产品应具备较高的专业性、精确性,提标人须提供所投产品省级及以上工信部门颁发的专精特新产品证书(提供相应证书复印件并加盖投标人公章,原件备查)。
3、发射单元
3.1发射激光束的波长:
532nm;
★3.2脉冲能量:
为保证重污染天气下雷达有效探测范围仍能满足要求,激光脉冲能量要求在10uJ~1000uJ区间可调(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
★3.3投标产品符合《激光产品的安全》国家标准(GB747.1-2012),对人眼角膜脉冲单位面积的照射量≤5*10-7J.cm-2(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
3.4脉冲频率:
2kHz/2.5kHz,可调;
3.5激光器:
Nd:
YAG激光器;
3.6泵浦方式:
固体激光二极管泵浦;
3.7激光器使用寿命大于12000小时;
3.8激光器冷却方式:
风冷。
4、接收单元
★4.1接收望远镜:
透射式同轴光学系统,应具有防光学干扰功能(提供经过国家机构认证的详细技术说明加盖投标人公章,开标时原件备查);
4.2望远镜口径要求不小于180mm;
4.3探测通道:
532nm垂直通道、532nm平行通道。
5、数据采集单元
5.1探测器:
高灵敏度、低噪声光电倍增管;
5.2其他:
原始数据记录方式为二进制文件,便于存储分析与二次开发。
文件头标注了记录完整详细观测数据信息,包括观测时间、经纬度、海拔、方位角、垂直角度、探测波长、偏振状态、车速、环境温度、采集点数、空间分辨率、激光波长、激光脉冲数等;
5.3系统能够全自动的运行采集并存储原始数据,能够远程控制,全天24小时无人值守观测。
6、扫描模块
★6.1扫描模块采用振镜扫描。
扫描模块与雷达主机分离,以保证雷达主机始终处于合适的工作环境条件中以避免雷达主机暴露在恶劣天气条件下影响长期稳定性(提供设备实物图证明);
6.2扫描单周期内扫描与垂直探测可通过软件设置为交替连续进行;
★6.3扫描周期(描效率及其监测数据空间分辨率):
因大气流动变化迅速,为保证扫描图像具有尽可能高的时间代表性,扫描一周(水平360°)时间优于30min且数据量不少于180条,每条数据不少于10000个脉冲。
(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
★6.4为保证在恶劣天气下正常工作,扫描振镜应具有自动除尘、除雨雪功能(提供经过国家机构认证的详细技术说明加盖投标人公章,开标时原件备查);
6.5扫描角度及安全性:
水平扫描0~360°,单周旋转无线缆缠绕;
6.6旋转速度:
1~30°/s,可调;
6.7角度分辨率:
≤0.1°。
★6.7为保证设备长期稳定性,机柜需具有较好的防护性能,防护等级符合GB4208-2008IP2X国家标准(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
7、GIS模块
7.1地图加载:
高精度矢量图和卫星图任意切换;
7.2支持图形缩放以及视角转换;
7.3支持手动添加和清除地理要素标注;
7.4支持地图测距;
7.5支持手动接入指定的地图文件,进行离线显示;
★7.6为方便更好的对观测结果进行判读,软件应支持同时加载水平扫描、垂直扫描、锥形扫描数据图像(提供第三方检测报告复印件加盖投标人公章,开标时原件备查);
7.7支持在扫描图像鼠标点击数据读取时间、经纬度、消光系数、退偏振比、颗粒物浓度数值;
8、软件
8.1整体要求
★8.1.1通过软件可进行工作方式选择:
垂直探测、斜程探测、锥形扫描、水平扫描、垂直扫描、走航探测;
8.1.2通过软件直接控制激光雷达、扫描振镜、可视化系统的启停;
8.1.3通过软件对激光器进行自动预热;
8.1.4软件界面上可显现雷达所处环境温度和湿度;
8.1.5软件可直接监控激光器工作状态,工作状态包括且不限于:
通信状态、控制模式、工作电流、工作温度、工作频率;
8.1.6软件可直接监控数据采集单元工作状态,工作状态包括且不限于:
通信状态、采样频率;
8.1.7软件可直接监控扫描模块工作状态,工作状态包括且不限于:
通信状态、水平角度、垂直角度、旋转速度;
8.1.8软件可直接监控UPS工作状态,工作状态包括且不限于:
通信状态、供电模式;
8.1.9软件可直接监控可视化系统工作状态,工作状态包括且不限于:
通信状态、运行状态;
8.1.10软件可直接获取激光雷达地理位置信息,包括且不限于经纬度、方位角等信息;
8.1.11支持软件脱机运行,导入、管理原始数据,进行伪彩图、廓线图和曲线图的查看。
8.2数据产品
8.2.1回波信号、信噪比:
支持回波信号、信噪比变化曲线图。
支持数据查询。
8.2.2消光系数、退偏振比:
以伪彩图的方式呈现。
支持数据查询。
能够结合GIS地理信息进行三维展示。
8.2.3光学厚度:
查看特定时间点的光学厚度的变化曲线图。
8.2.4边界层:
实时自动绘制边界层高度。
支持边界层信息的数据查询。
8.2.5云信息:
在消光系数伪彩图中标识云底、云高、云峰等信息。
支持数据查询。
8.2.6能见度:
显示能见度的曲线图信息。
支持数据查询。
8.2.7支持污染物的污染物自动判别,以伪彩图的形式实现。
8.2.8颗粒物质量浓度时空分布,反演颗粒物(PM10)质量浓度时空分布图。
9.工作环境要求
9.1电源供应:
220V±10%,50-60Hz,功耗不大于1kW;
9.2仪器工作温度范围:
15℃-30℃;工作湿度范围:
0-90%。
二、便携式颗粒物激光雷达
1、设备用途
1.1探测大气气溶胶(飘尘)垂直分布和时空演变特征
1.2探测云垂直分布、时空演变特征
1.3进行云层3D扫描,探测云底高随时间变化
1.4探测大气边界层的结构和时空演变特征
1.5探测颗粒物质量浓度(如PM10)的时空演变特征
1.6大气水平能见度及斜视程能见度
1.7实现非球形粒子与球形粒子的区分探测,识别沙尘、烟尘等非球形粒子(扬沙、沙尘暴监测)
1.8城市边界大气剖面扫描,探测污染输送动态监测,区别局地污染与外部输送
1.9区域污染物快速溯源,进行污染排查和应急监测
1.10区域污染物精准定位,可视化展示污染物水平分布状况
2、性能指标
2.1激光雷达整机至少包括:
发射单元,接收单元,数据采集单元,GPS模块,可视化模块。
上述五个部分须一体化集成,不允许分体或分离放置。
2.2时间分辨率要求优于1分钟。
2.3空间分辨率优于15米,可通过软件设置。
★2.4探测盲区小于35m(提供样机实时查看原始文件及雷达回波信号进行专家验证)。
2.5探测高度:
白天≥6km,夜间≥15km。
★2.6雷达系统在无外接计算机的情况下也可以独立工作。
★2.7雷达系统须支持无线和有线的数据传输模式。
★2.8雷达系统须配置OLED显示屏,可以显示激光器能量、波长、探测器电压、雷达内部环境温湿度气压状态参数。
★2.9所投产品应具备独立严格的质量控制方法。
(须提供质控装置的外观展示及独立知识产权复印件并加盖投标人公章,原件核查。
)
★2.10为了方便雷达系统调试和数据订正、校准等工作,激光雷达系统需设计光路调节与校准装置。
(提供样机现场验证)。
3、发射单元
3.1雷达系统发射系统采用固态激光器光源。
3.2雷达系统光源发射波长:
532nm。
★3.3光源单脉冲激光能量:
大于50μJ(软件可调)。
3.4光源脉冲频率:
大于3kHz(软件可调)。
4、接收单元
★4.1接收系统采用望远镜系统,望远镜与激光发射单元是同轴光路设计,接收系统应具有防光学干扰功能;(提供独立知识产权证明文件,开标时原件备查)。
★4.2接收望远镜须采用双望远镜结构设计,双望远镜须集成于雷达整机中,满足雷达正常工作要求,两个望远镜的间距不大于20cm;(提供样机实时查看原始文件及雷达回波信号)。
★4.3整望远镜直径不小于160mm,次望远镜直径不小于30mm。
(提供样机现场验证)
4.4探测通道:
设置偏振通道。
★4.5可视化照相功能:
激光雷达主机须高度集成可视照相系统,实现扫描观测与拍照同步、同方位联动。
5、数据采集单元
5.1探测器:
高灵敏度、低噪声光电倍增管。
5.2原始数据记录方式为二进制文件,便于存储分析与二次开发。
5.3系统能够全自动的运行采集并存储原始数据,能够远程控制,全天24小时无人值守观测。
6、扫描模块
6.1扫描方式:
激光雷达整机须通过云台双点或多点固定实现三维立体扫描,不允许光学接收系统单侧固定旋转。
6.2水平扫描角度:
0°~360°。
6.3垂直角度:
0°~180°。
6.4角度分辨率:
优于0.15°。
6.5扫描速度:
1~30°/s,软件可以调节。
7、GIS模块
7.1地图加载:
高精度矢量图和卫星图任意切换;
7.2支持图形缩放以及视角转换;
7.3支持手动添加和清除地理要素标注;
7.4支持地图测距;
7.5支持手动接入指定的地图文件,进行离线显示;
★7.6为方便更好的对观测结果进行判读,软件应支持同时加载水平扫描、垂直扫描、锥形扫描数据图像;
7.7支持在扫描图像鼠标点击数据读取时间、经纬度、消光系数、退偏振比、颗粒物浓度数值;
8、产品规格和工作环境要求
★8.1激光雷达整机尺寸(长*宽*高):
不大于700*300*300mm。
★8.2整机重量:
整机重量不大于40kg。
8.3电源供应:
市电和直流电源两种供电模式。
直流电源采用24V供电。
功耗不大于300W。
8.4仪器工作温度范围:
-10℃-45℃;工作湿度范围:
0-90%。
9、可视化模块
9.1分辨率:
不小于200万像素;
9.2成像器件:
CCD或者CMOS;
9.3镜头:
配置不低于4.7-94mm(20倍光学变焦);
9.4最低照度:
不小于彩色:
0.05Lux@(F1.6,AGCON)黑白:
0.01Lux@(F1.6,AGCON);
9.5电子快门:
1/1-1/30000秒;
9.6通讯接口:
RS-485、RJ45;
9.7日夜转换,宽动态,背光补偿;
9.8镜头具有自动除尘、除雨雪功能;
9.9具有夜间红外功能,提高夜间拍照清晰度。
10、软件性能
10.1整体要求
★10.1.1通过软件可进行工作方式选择:
垂直探测、斜程探测、锥形扫描、水平扫描、垂直扫描。
10.1.2通过软件直接控制激光雷达系统的启停。
10.1.3通过软件对激光器进行自动预热。
10.1.4软件界面上可显现雷达所处环境温度和湿度。
10.1.5软件可直接监控激光器工作状态,工作状态包括:
通信状态、控制模式、工作电流、工作温度、工作频率。
10.1.6软件可直接监控数据采集单元工作状态,工作状态包括:
通信状态、采样频率。
10.1.7软件可直接监控扫描模块工作状态,工作状态包括:
通信状态、水平角度、垂直角度、旋转速度。
10.1.8软件可直接监控UPS工作状态,工作状态包括:
通信状态、供电模式。
10.1.9软件可直接监控可视化系统工作状态,工作状态包括:
通信状态、运行状态。
10.1.10软件可直接获取激光雷达地理位置信息,包括经纬度、方位角等信息。
10.1.11支持软件脱机运行,导入、管理原始数据,进行伪彩图、廓线图和曲线图的查看。
10.1.12地图切换:
高精度矢量图和卫星图任意切换。
10.1.13支持地图图形缩放以及视角转换。
10.1.14支持手动在地图添加和清除地理要素标注。
10.1.15支持地图测距;
10.1.16支持手动接入离线地图。
10.2数据产品
10.2.1回波信号、信噪比:
支持回波信号、信噪比变化曲线图。
支持数据查询。
10.2.2消光系数、退偏振比:
以伪彩图的方式呈现。
支持数据查询。
能够结合GIS地理信息进行三维展示。
10.2.3光学厚度:
查看特定时间点的光学厚度的变化曲线图。
10.2.4边界层:
实时自动绘制边界层高度。
支持边界层信息的数据查询。
10.2.5云信息:
在消光系数伪彩图中标识云底、云高、云峰等信息。
支持数据查询。
10.2.6能见度:
显示能见度的曲线图信息。
支持数据查询。
10.2.7支持污染物的污染物自动判别,以伪彩图的形式实现。
10.2.8颗粒物质量浓度时空分布,反演颗粒物(PM10)质量浓度时空分布图。
11.配置要求
11.1激光雷达整机1套
11.2激光雷达采集、分析软件1套
11.3安装支架(含云台)1套
11.4笔记本电脑1套
11.5GPS1套
11.6电子罗盘1套
11.7高清地图1套
三、配套站房
1、整体要求
1.1提供满足仪器使用的站房及辅助配套设施。
1.2站房整体采用无骨架拼装结构,安装方便、快速、美观。
1.3站房采用结构防水,彻底防漏雨,避免密封胶防漏,易老化的弊病。
1.4站房的外露紧固件(除高强度螺栓外)须采用铝合金件,外表面喷涂三防底漆和优质面漆。
铝合金件或喷涂三防底漆和面漆等多种形式达到三防要求,提高此站房对环境适应能力。
2、站房要求
2.1监测站房尺寸:
外部尺寸:
2500mm×3000mm×2650mm;内部尺寸:
2300mm×2800mm×2500mm。
2.2站房结构:
站房选用净化彩钢板现场组装而成,安装灵活、结构可靠;前、后、左、右、屋顶采用双层净化彩钢板、超厚保温层。
2.3配备2米折梯(打开后4米),充分考虑工作人员的安全与方便。
2.4墙体要求:
站房内外墙采用不小于0.5mm厚彩钢板板材,彩钢板喷涂工艺为:
底层采用环氧树脂,面漆采用聚酯、硅改性聚酯工艺,板材间采用插入式拼装结构,有足够的强度,并防止漏水。
2.5站房门选用标准防盗门进行安装,颜色为白色与站房外墙颜色色调一致,安全美观、密封、保温性能优良,不锈钢防锈安全锁,整体下压式门把手。
2.6屋顶:
屋顶采用结构防水,彻底防漏雨、避免了密封胶防漏的弊病。
2.7供电系统:
站房供电为三相五线(含零线和地线),空调一相、仪器一相、照明和插座一相,总用电功率为3千瓦左右,通过组合电箱分路分别控制,电源布设应符合国家用电相关安全要求。
站房内供电线路、开关、插座全部采取线槽明装。
2.8按照国家建筑物防雷设计规范,站房应做好对直击雷的防护;同时应考虑电源线和通信线遭受直击雷或感应雷加载了过电压及雷电流以感应方式的破坏,设计安装防避直击雷和感应雷的装置。
验收时,需提供当地气象部门出具的防雷测试报告。
接地线要求接地电阻小于4Ω。
2.9消防系统:
站房应建设符合规范要求的防火和灭火设施。
鉴于站房内部空间,选用站房须用悬挂贮压式自动消防系统。
当保护区发生火灾时,热敏线迅速传导火灾信号,启动灭火装置,自动喷放灭火剂灭火,防护区发生火灾,环境温度上升至灭火装置设定的公称动作温度时,无论热敏线是否动作,灭火装置自动启动喷放灭火剂灭火,灭火装置与报警控制器联用时,组成站房内自动灭火系统。
2.10站房内配置办公桌1张,办公椅1个,灭火器,专用空调1部,换气扇一组。
四、运维服务
1.质量控制
1.1、每日查看激光雷达的回波信号采集状态等。
1.2、每周检查天窗状态。
1.3、每周检查记录雷达激光能量灯。
1.4、每季度进行一次能量标校等。
1.5、每半年进行雷达系统的光路校准工作,查看光路系统有无异常,激光光斑大小情况,光学系统是否发生偏移。
1.6、每半年进行探测系统检查。
每半年进行一次发射光路上光学部件的透过率和反射率的检查。
1.7投标人须提供消光系数、颗粒物浓度及空间分布等数据的质量控制详细方案,提高数据质量。
2.运行维护
2.1投标人须安排专职技术人员,负责该台仪器的日常巡检、定期维护保养、校准、耗材的更换、故障检修等工作,确保仪器设备正常运行并及时传输数据。
2.2运维目标
1)重污染过程数据有效捕获率≥90%;
2)每季度数据有效捕获率≥80%;按季度考核;
3)日常质控措施执行率95%以上;
4)异常情况处理率达到100%。
2.3投标人须对运维目标、运维内容(包括但不限于远程监控,巡检、维护的内容与频次,零部件的清洁与更换,校准等)、仪器故障解决方案、记录表格的填写、数据分析报告服务等方面提供详细运维计划。
3.运维服务年限
运维服务年限为三年。
五、数据分析服务
1、提供详细的激光雷达数据分析方案
投标人须提供多台激光雷达联网观测数据的分析方案和案例,内容不限于:
消光系数浓度在不同高度上的时空变化,大气边界层PBL、光学厚度AOD的时空变化,多台雷达切面扫描的通量计算,风、温雷达数据的结合使用等。
2.日常分析
2.1针对常规气态污染物多参数(PM10、PM2.5、SO2、CO、NO2、O3等)监测结果与激光雷达数据联合分析空气质量状况。
2.2多台激光雷达联网观测数据的综合分析。
3.重污染天气分析
3.1重污染成因分析及重污染特征分析;
3.2外来输送与局地颗粒物污染分析;
3.3结合地面站数据综合分析;
3.4结合气溶胶激光雷达数据分析区域边界层结构特征;
3.5结合气象数据分析重污染的形成原因和扩散条件;
3.6后向轨迹数据分析;
3.7综合分析输出重污染过程数据分析报告。
演示条款
(一)颗粒物激光雷达现场ppt或视频演示条款,参数如下:
1、为同时保证在垂直及扫描探测等不同应用下都具有良好的时间分辨率,投标产品时间分辨率要求优于1min;
2、为同时保证在垂直及扫描探测等不同应用下都具有良好的空间分辨率,投标产品空间分辨率要求优于7.5m,且可以调整;
3、光源能量:
为保证重污染天气下雷达有效探测范围仍能满足要求,激光脉冲能量要求在10uJ~1000uJ区间可调;须检测10uJ、100uJ、500uJ和1000uJ四个档位的激光脉冲能量(厂家自备能量检测装置)。
4、望远镜口径要求不小于180mm;
5、扫描模块采用振镜扫描。
扫描模块与雷达主机分离,以保证雷达主机始终处于合适的工作环境条件中以避免雷达主机暴露在恶劣天气条件下影响长期稳定性;
6、扫描周期(描效率及其监测数据空间分辨率):
因大气流动变化迅速,为保证扫描图像具有尽可能高的时间代表性,扫描一周(水平360°)时间优于30min且数据量不少于180条。
每条数据不少于10000个脉冲;
7、通过软件可进行工作方式选择:
垂直探测、斜程探测、锥形扫描、水平扫描、垂直扫描、走航探测。
8、走航观测:
投标产品应具备良好的走航功能(边走边测),雷达置于车内,车辆行驶速度在不低于80km/h情况下,数据采集间隔距离不大于100米(即时间分辨率可达到4.5秒),以保证采集数据具有较高的时间和空间分辨能力。
(二)便携式颗粒物激光雷达ppt或视频演示条款,参数如下:
1激光雷达整机至少包括:
激光雷达整机至少包括:
发射单元,接收单元,数据采集单元,GPS模块,可视化模块。
上述五个部分须一体化集成,不允许分体或分离放置。
2探测盲区小于35m;
3雷达系统在无外接计算机的情况下也可以独立工作;
4雷达系统须支持无线和有线的数据传输模式;
5雷达系统须配置OLED显示屏,可以显示激光器能量、波长、探测器电压、雷达内部环境温湿度气压状态参数;
6为了方便雷达系统调试和数据订正、校准等工作,激光雷达系统需设计光路调节与校准装置。
7光源单脉冲激光能量:
大于50μJ(软件可调);。
8接收望远镜须采用双望远镜结构设计,双望远镜须集成于雷达整机中,满足雷达正常工作要求,两个望远镜的间距不大于20cm;
9整望远镜直径不小于160mm,次望远镜直径不小于30mm。
10可视化照相功能:
激光雷达主机须高度集成可视照相系统,实现扫描观测与拍照同步、同方位联动。
11整机尺寸(长*宽*高):
不大于700*300*300mm;
12整机重量:
整机重量不大于40kg。
 升级会员
升级会员 