自动控制原理实验报告.docx
《自动控制原理实验报告.docx》由会员分享,可在线阅读,更多相关《自动控制原理实验报告.docx(14页珍藏版)》请在冰豆网上搜索。
自动控制原理实验报告
实验一典型环节的模拟研究及阶跃响应分析
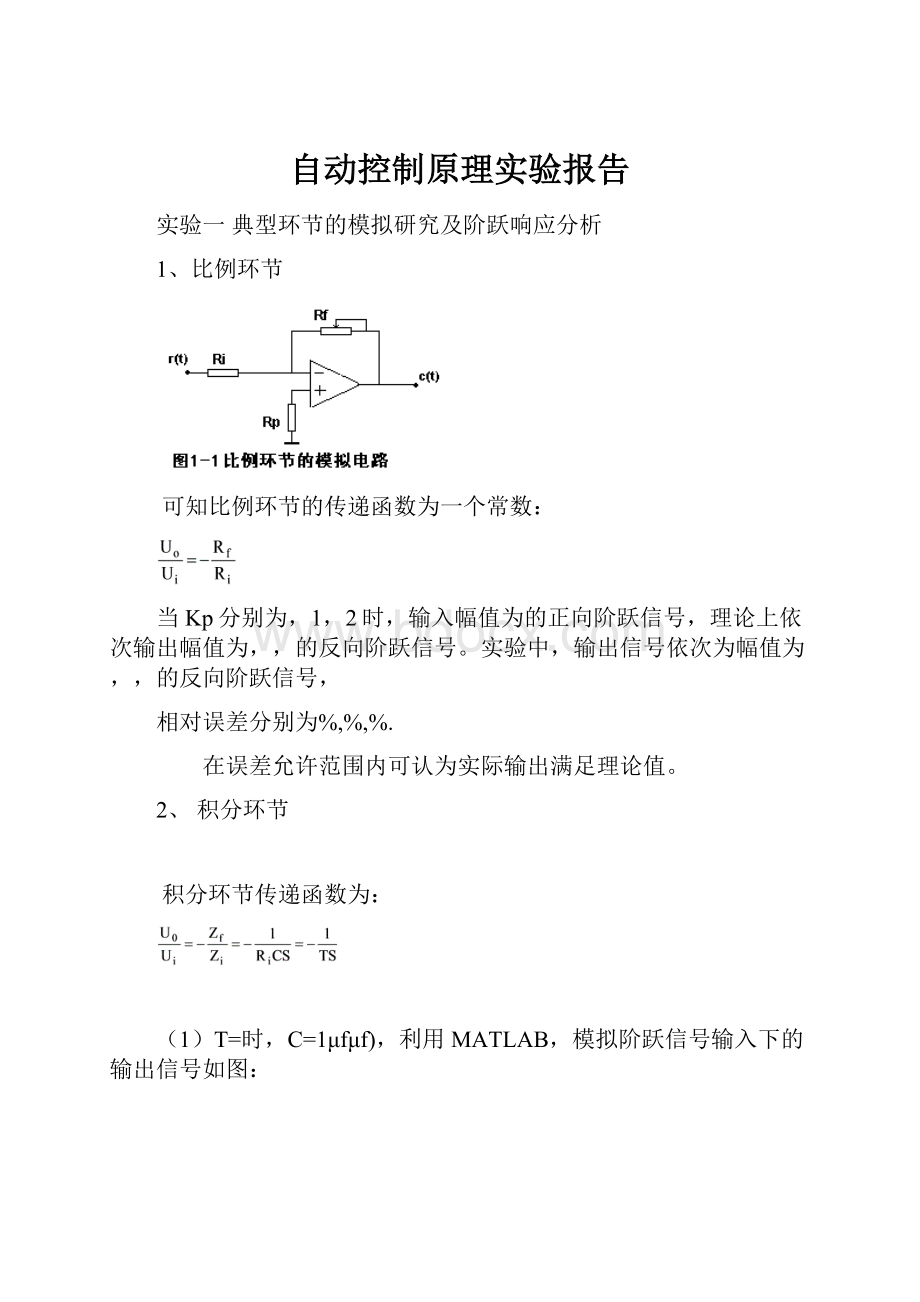
1、比例环节
可知比例环节的传递函数为一个常数:
当Kp分别为,1,2时,输入幅值为的正向阶跃信号,理论上依次输出幅值为,,的反向阶跃信号。
实验中,输出信号依次为幅值为,,的反向阶跃信号,
相对误差分别为%,%,%.
在误差允许范围内可认为实际输出满足理论值。
2、积分环节
积分环节传递函数为:
(1)T=时,C=1μfμf),利用MATLAB,模拟阶跃信号输入下的输出信号如图:
T=T=
与实验测得波形比较可知,实际与理论值较为吻合,理论上T=时的波形斜率近似为T=时的三倍,实际上为8/=,在误差允许范围内可认为满足理论条件。
3、惯性环节
惯性环节传递函数为:
K=Rf/R1,T=RfC,
(1)保持K=Rf/R1=1不变,观测T=秒,秒(既R1=100K,C=1f,f)时的输出波形。
利用matlab仿真得到理论波形如下:
T=时
ts(5%)理论值为300ms,实际测得ts=400ms
相对误差为:
(400-300)/300=%,读数误差较大。
K理论值为1,实验值,
相对误差为()/=7%与理论值较为接近。
T=时
ts(5%)理论值为30ms,实际测得ts=40ms
相对误差为:
(40-30)/30=%
由于ts较小,所以读数时误差较大。
K理论值为1,实验值,
相对误差为()/=7%与理论值较为接近
(2)保持T=RfC=不变,分别观测K=1,2时的输出波形。
K=1时波形即为
(1)中时波形
K=2时,利用matlab仿真得到如下结果:
ts(5%)理论值为300ms,实际测得ts=400ms
相对误差为:
(400-300)/300=%
读数误差较大
K理论值为2,实验值,
相对误差为()/2=%
与理论值较为接近。
4、二阶振荡环节
令R3=R1,C2=C1
T=R1C1,K=R2/R1
=1/T=1/R1C1
ξ=1/2K=R1/2R2
(1)取R1=R3=100K,C1=C2=1μf既令T=秒,调节R2分别置阻尼比ξ=,,1
R2=500k,ξ=时,
=10;matlab仿真结果如下:
超调量Mp理论值为e^(-ξ*π/(1-ξ^2)^=73%,实验值为与理论值较为接近.
过渡过程时间理论值(计算时的估计公式)ts=4/(ξ*
)=4s,由matlab仿真得ts=,实验值为,与仿真得到的理论值相对误差为()/=%较为接近。
R2=100k,ξ=,
=10;matlab仿真结果如下:
超调量Mp理论值为e^(-ξ*π/(1-ξ^2)^=16%,实验值为与理论值较为接近
过渡过程时间理论值(计算时的估计公式)ts=4/(ξ*
)=,由matlab仿真得ts=,实验值为,与仿真得到的理论值相对误差为较为接近。
R2=50k,ξ=1,
=10;matlab仿真结果如下:
超调量Mp理论值为0,实验值为/=%,与理论值吻合。
过渡过程时间理论值,由matlab仿真得ts=,实验值为,与仿真得到的理论值相对误差为较为接近。
(2)取R1=R3=100K,C1=C2=μf既令T=秒,重复进行上述测试。
R2=500k,ξ=时,
=100;matlab仿真结果如下:
超调量Mp理论值为e^(-ξ*π/(1-ξ^2)^=73%,实验值为与理论值较为接近.
过渡过程时间理论值(计算时的估计公式)ts=4/(ξ*
)=,由matlab仿真得ts=,实验值为,与理论值相对误差为较为接近。
R2=100k,ξ=时,
=100;matlab仿真结果如下:
超调量Mp理论值为e^(-ξ*π/(1-ξ^2)^=16%,实验值为与理论值较为接近
过渡过程时间理论值(计算时的估计公式)ts=4/(ξ*
)=,由matlab仿真得ts=,实验值为,与仿真得到的理论值相对误差为较为接近。
R2=50k,ξ=1,
=10;matlab仿真结果如下:
超调量Mp理论值为0,实验值为/=%,与理论值吻合。
过渡过程时间理论值,由matlab仿真得ts=,实验值为,与仿真得到的理论值相对误差为较为接近。
六、思考题
1、根据实验结果,分析一阶系统ts与T,K之间的关系。
参数T的物理意义
T越大,ts越大,ts与K无关。
T反映了系统的瞬态响应速度。
2、根据实验结果,分析二阶系统ts,Mp,与
ξ之间的关系。
参数
ξ的物理意义
超调量只与ξ有关,ξ越小,超调量越大;调节时间与
*ξ有关,乘积越大,调节时间越小;
*ξ反映了系统阶跃响应的衰减程度,
反映了阶跃响应的振荡快慢程度。
3、对于图1-5所示系统,若将其反馈极性改为正反馈;或将其反馈回路断开,这时的阶跃响应应有什么特点试从理论上进行分析(也可在实验中进行观察)
变成正反馈或将其反馈回路断开,理论上阶跃响应的大小不断增加,实际中受制于运放的最大输出电压的影响,阶跃响应快速上升,最后达到一个很大的幅值。
4、根据所学习的电模拟方法,画出开环传递函数为
的单位反馈系统的模拟线路图,并注明线路图中各元件参数(用R、C等字符表示)和传递函数中参数的关系。
易知将一个一阶惯性环节与图1-5所示电路串联起来后,再加一个单位反相比例环节即可实现,电路图如下
其中应有R3=R1,C2=C1,于是K=Rf/R1,T1=Rf*C,T2=R1*C1,ζ=R1/(2*R2)。
实验二开环零点及闭环零点作用的研究
实验电路图见附件
(a)选择T=,K=,
T(S)=L(S)/1+L(S)=^2+S+
利用MATLAB仿真如下
Mp:
理论值实际值相对误差%
tp:
理论值实际值相对误差%
ts:
理论值23实际值相对误差%
(b)Td=
T(S)=L(S)/1+L(S)=+^2++
利用MATLAB仿真
Mp:
理论值实际值相对误差%
tp:
理论值实际值相对误差%
ts:
理论值实际值相对误差%
(c)T(S)=L(S)/1+L(S)=^2++
利用MATLAB仿真
Mp:
理论值实际值相对误差%
tp:
理论值实际值相对误差%
ts:
理论值实际值相对误差%
比较实验二、三,知开环零点加快了瞬态响应;比较实验一、三,知闭环零点改善了整体的闭环性能,其主要原因是改变了阻尼比。
由实验结果可知,增加比例微分环节后系统的瞬态响应改善了,其根本在于增大了阻尼比。
而第二个实验中由于引进了开环零点,所以其性能与第三个不一样。
实验心得及体会
提前预习,熟悉电路图,设计好参数对完成实验有很大的帮助,可以起到事半功倍的效果,要养成提前预习的习惯。
思考题
为什么说系统的动态性能是由闭环零点,极点共同决定的
从时域和频域的关系来看,极点的位置决定了系统的响应模态,而零点的位置决定了每个模态函数的相对权重。
实验三控制系统稳定性研究
一、实验数据
本实验的线路图如下,其中R11=R12=R21=R31=100K,
1.对于方案一,取R13=R22=1M,C1=1μ,C2=10μ,R3=100K,C3=1μ,由实验现象得知,对任意α∈(0,1),系统均稳定,且α越大,响应速度越快,幅值也越大。
对于方案二,C3=1μ,知对于任意α系统仍稳定,且α越大,响应速度越快,幅值也越大。
方案三中R32=1M,C3=1μ,当输出呈现等幅振荡时,α=
2.对于第一组,由实验可知对任意α∈(0,1)系统均稳定,且α越大,响应速度越快,幅值也越大。
第二组中,当输出呈现等幅振荡时,α=
3.仍选择以上电路,要使T=RC=,可选取R=500K,C=1μ。
而由以上传
a=1时,R13=R22=R32=500K,C1=C2=C3=1μ。
实验测得当输出开始呈现缓慢衰减,K=。
a=2时,R13=1M,R22=500K,R32=250K,C1=C2=C3=1μ。
实验测得当输出开始呈现缓慢衰减,K=。
a=5时,R13=250K,C1=10μ,R22=500K,C2=1μ,R32=100K,C3=1μ。
此时发现对任意α∈(0,1)系统均稳定。
二、数据处理
1.对于前三个方案,由Hurwitz判据易知
=,,时系统临界稳定。
而实验中α不可能大于1,故前两个实验中系统均稳定,而第三个实验中测得α=,与理论值相对误差为。
对于后两组实验,由Hurwitz判据易知
=,时系统临界稳定。
而实验中α不可能大于1,故第一个实验中系统稳定,而第二个实验中测得α=,与理论值相对误差为上述两个实验误差较大可能原因是接触电阻的影响。
2.由Hurwitz判据易知(K临=9,,时系统临界稳定。
而K=α*R13*R22*R32/(R12*R21*R31),
实验1中,K=10和与理论值相对误差为(10-9)/9=%
实验2中,K=,和理论值得相对误差为而第三个实验中K<1**5*1=不可能大于,故第三个实验中系统稳定。
总结:
闭环系统虽然改善了系统的响应性能,但同时也带来了不稳定的可能,设计系统时一定要考虑到保持系统的稳定性。
虽然如此,我们仍可以利用系统的不稳定性,比如制作信号发生器等。
体会:
本次实验由于连线之前没有对线路进行检测,有一条导线坏了查了很久都没查出来,浪费了很多时间,以后应该注意,进行连线前对仪器及导线进行简单的检查,最好连好一个版块检查一个版块,避免不必要的时间浪费。
三、思考题
1.三阶系统的各时间常数怎样组合系统稳定性最好何种组合最差
由第二个实验知三阶系统的各级时间常数相差越大,系统越稳定,事实上当系数按倍数关系递增时且倍数越大时系统的稳定性越好;各级时间常数一致时稳定性最差。
2.已知三阶系统各时间常数,如何估计其自然振荡频率
写出闭环传递函数,求解分母三阶方程,若有主导极点,则可利用该主导极点估计三阶系统的自然震荡频率,若无则需要用MATLAB进行仿真计算。
实验四 控制系统频率特性的测试
一、实验数据
1.电路图
G(s)=R11/R1/((1+s*R11*C1)*(1+s*R1^2*C3/R22+s^2*R1^2*C2*C3))
其中所有的电阻都取100K,C=1μ,C1=C2=μ,于是T1=,T2=,ζ=0.,K=1,G(s)=1/((1+*s)*(1+s+*s^2))。
一阶转折频率10rad/s=
二阶转折频率100rad/s=16HZ
理论bode图如下
实际bode图如下
转折频率约为10rad/s,斜率约为40db/sec
放大倍数为1倍
转折频率约为10rad/s,斜率约为135°/sec
阻尼比约为0.5
结论:
结论:
李沙育图形可以方便地用于分析系统的频率响应,从而获得系统的传递函数,但由于幅频响应和相频响应非线性较大,所以仍存在一定误差。
尤其当输出电压较小的时候,李沙育图线条不清晰,读数误差较大。
 升级会员
升级会员 