智能车测速模块设计.docx
《智能车测速模块设计.docx》由会员分享,可在线阅读,更多相关《智能车测速模块设计.docx(9页珍藏版)》请在冰豆网上搜索。
智能车测速模块设计
智能车测速模块设计
测速模块设计
2.2速度检测方案
小车的实际行驶速度是小车速度控制的控制输入量,准确实时的测量小车
的速度才能实现小车的速度控制,即纵向控制。
常用的测速方案有以下几种:
方案一:
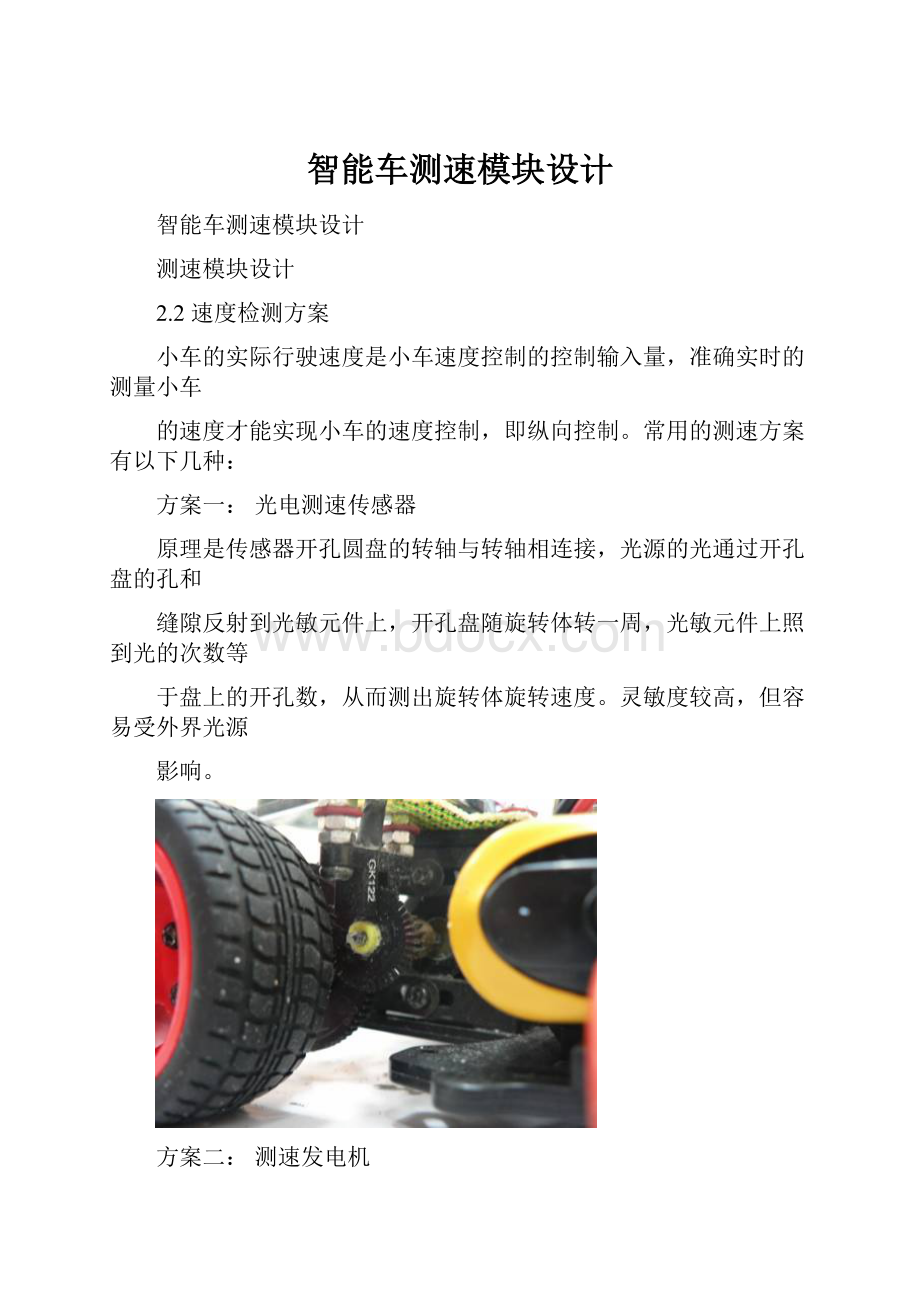
光电测速传感器
原理是传感器开孔圆盘的转轴与转轴相连接,光源的光通过开孔盘的孔和
缝隙反射到光敏元件上,开孔盘随旋转体转一周,光敏元件上照到光的次数等
于盘上的开孔数,从而测出旋转体旋转速度。
灵敏度较高,但容易受外界光源
影响。
方案二:
测速发电机
原理是将旋转机械能转化成电信号,适合于测量速度较高的旋转物体的速
度。
采用电磁感应的原理。
但市场上测速发电机应用于低压市场的比较少,而
且都比较重,不适用于模型车,并且要将侧速发电机安装到电动车上需要对电
动车模型进行较大改动,由于其质量较重,可能会严重影响电动车的机动性能,
除非自制。
优点是测速准确、稳定、快速,可以直接由AD转换器读入单片机
测得当前速度值。
图2-3测速发电机
图4-6霍尔元件测速电路
我们根据电动车的实际情况,在车模上一共安装了2个磁铁,装在车轮的
轴上,如图3-4所示,当电动车的车轮转动一周,霍尔开关将输入2个脉冲到
单片机。
单片机通过定时器,计数器捕获这些脉冲,从而计算出电动车当前的
速度值。
2.3速度检测模块--速度传感器
速度检测电路的基本原理为:
在很短的时间内,通过光电传感器来测量固定在后轮的轴上的码盘通过的孔数,输送到单片机的脉冲累加器外部引脚,经过换算计算出智能车的实际速度,为速度PID控制环节提供可靠的数据。
光电传感器是经过改造制成的。
以智能车原来所携带的安装在后轮的轴上的齿轮作为码盘,齿轮本身具有76个齿,即相当于光电码盘上有76个孔,具有相当的精确度。
另外自己制作基本的支架,通过光电传感器来实现对后轮电机的速度采集。
光电传感器的供电电压为5V,外加1K的上拉电阻,输出信号的是0~5V高低电平。
具有齿槽结构的圆盘固定在后轮驱动电机输出轴上,采用直射式红外光传感器读取齿槽圆盘转动脉冲,再通过PT7返回给单片机。
2.2.3车速检测模块
车速检测模块方案很多,而且各方案在性能上区别不大,有基于遮光盘的红外对射式速度传感器、霍尔效应传感器、差速器侧面卡盘的红外反射式速度传感器、专用光电编码器。
我们认为对于速度传感器最重要的是简单稳定,而大多数队伍自行设计码盘,费时费力,而且线度往往不够。
本队就地取材,拆了一个坏了的机械鼠标,得到了三个码盘和光电对射管,在初期线度也达到了速度检测的要求,省时省力。
当校内赛出现后,我们的车速越来越高,鼠标码盘已经不能满足我们的要求,于是我们换上了500线的码盘,如图2.5。
从根本上解决了速度检测的精度问题。
图2.5专业码盘实物图
速度传感器
为了使车模在跑道上平稳地运行,并以最快的时间完成比赛,这就要求车模能以高速通过直道,并以恰当的速度平稳地转弯,这就要求车模要有较好的调速性能。
直流电机调速通常使用PWM调速来完成,通过改变驱动器输出PWM波的占空比,就可以调节加在电机上的平均电压,达到调速的目的。
但是,采用开环调节时电机特性比较软,转速收到供电电压、负载变化等因素变化影响较大,所以需要设置速度传感器,对车速进行实时检测进行闭环控制。
检测车速的办法有很多种,例如测速电机、旋转编码器、反射式光电检测、对射式光栅检测、霍尔测速等等方法。
鉴于测速的可靠性,我们采用工业用的增量式旋转编码器进行测速。
受安装条件的制约,我们选用了一款2.0cm直径256线的小型编码器,编码器安装如图3.5所示。
编码器安装示意图
速度传感器
图2.9速度传感器
参赛车模的速度传感器如图2.9所示。
速度传感器是由安装在车模电机主轴上的一个直径为25mm的齿轮、一对红外线发射、接收管及电压比较器电路组成的。
考虑到硬件的安装与齿轮的加工难易程度,选择石英钟齿轮作为码盘。
齿轮轴直径为2.0mm与电机主轴端部的孔(直径约为2.3mm)为过盈配合,故用502胶将其粘牢。
红外线发射、接收管采用集成式光电开关。
在运动过程中,齿轮随电机主轴一起转动,其齿部断续地遮挡红外线光束,使得接收管接收到断续的光脉冲信号。
经过如图2.10所示的电路,将接收管接收到的光脉冲信号转换为电脉冲信号。
该电路采用5V供电,调节电位器阻值,使得红外线被齿轮遮挡时电路输出低电平,红外线不被遮挡时电路输出高电平。
但是,红外线集成式光电开关的恢复特性较差,在高频下图2.10所示电路输出的高低电平的区分度较差,须将电平信号经电压比较器整形后方可使用。
图2.10速度传感器原理图
3.6测速模块安装
速度传感器子板用502胶粘在电机上方的框架上,确保霍尔器件的正面正对磁铁。
电机主轴每转一圈,被驱动轮转四分之一圈,前进长度为4cm,霍尔传感器就能向控制系统发送两次次脉冲,通过计数器和微控制器的增强型输入捕捉功能可以计算出此时智能车的速度。
如图3.4所示。
图3.4速度传感器模块实际安装图
3.3编码器的安装
对编码器的安装,我们是将编码器安装到电机后架上面,主要有两种方法固定;
1.用强力胶粘,这种方法方便,位置自由度大,且不增加额外的重量。
但一旦安装上,很难把编码器再取下来,不能重复使用。
2.用特制的木架支撑。
这种方法需要特殊的设计,但安装方便、重复利用率高。
图3.4编码器的安装
2.3.2测速电路设计
在测速模块电路设计中,在后轮的齿盘处均匀的布置12块小磁钢,车轮每转一圈可以获得12个脉冲。
霍尔传感器的稳定性较高,一般不易发生故障。
但是在速度过高时可能会出现响应不及时,造成脉冲信号缺失的情况。
这个问题可以通过软件调节检测周期来进行修改。
具体设计电路如图2.7所示
4.1.5车速检测模块
为了使得智能车能够平稳地沿着赛道运行,除了控制前轮转向舵机以外,还需要控制车速,使智能车在急转弯时速度不要过快而冲出赛道,直道上则以较快速度行驶。
基于测速的精确和安装方便的原则,本队车速检测单元采用日本OMRON公司的E6A2-CW3C型旋转编码器作为车速检测元件。
其精度为车轮每旋转一周,旋转编码器产生200个脉冲,该编码器硬件电路简单,且信号采集速度快、精度高,满足智能车车速控制精度要求。
旋转编码器的工作电压为5—12伏,输出为一系列脉冲。
电路原理图如图4.1.5所示
图4.1.5编码器原理图
E6A2-CW3C型编码器的输出方式为电压输出,因此本系统将编码器的输出接一个5K上拉电阻再与PT0口相连。
PT0采用8位输入脉冲累加模式对旋转编码器的输出脉冲进行累加计数。
车速检测单元安装如图4.1.5.1所示,在编码器的中轴上安装一个齿数18的齿轮,并将该齿轮与同轴于后轮的传动齿轮咬合。
如此则后轮旋转的同时将通过传动齿轮带动编码器一同旋转。
因此只需要测量一定时间(5.12ms)编码器输出的脉冲数就能准确计算出车速。
车速的计算公式如1所示:
式中(d为后轮直径,n为采样时间内PT0捕获的脉冲数,T为采样周期)。
编码器安装图如图4.1.5.1所示:
第四章智能车硬件电路设计21
 升级会员
升级会员 