传送带模型分析精编版.docx
《传送带模型分析精编版.docx》由会员分享,可在线阅读,更多相关《传送带模型分析精编版.docx(43页珍藏版)》请在冰豆网上搜索。
传送带模型分析精编版
传送带模型分析+电磁感应经典解析
传送带模型分析
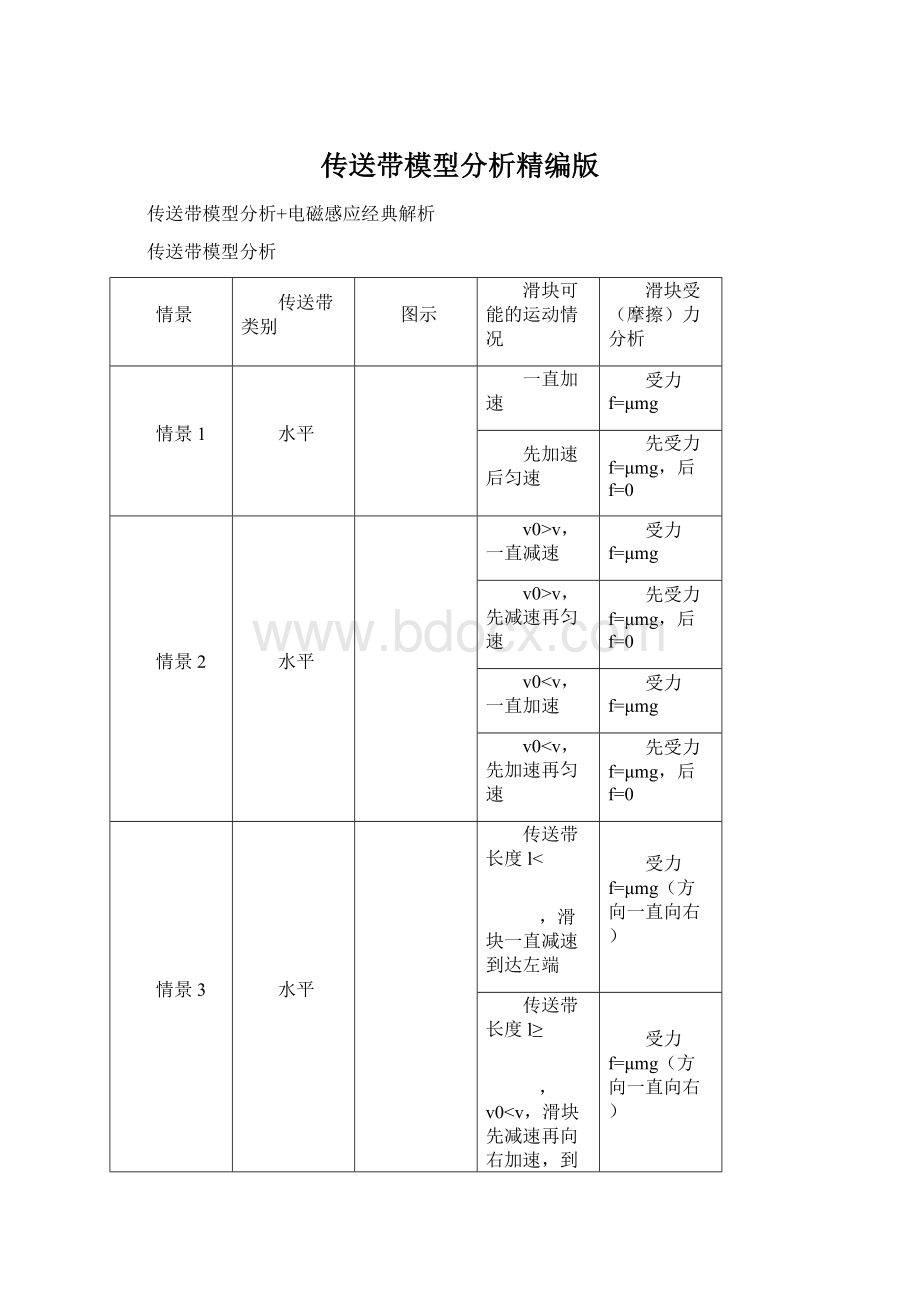
情景
传送带类别
图示
滑块可能的运动情况
滑块受(摩擦)力分析
情景1
水平
一直加速
受力f=μmg
先加速后匀速
先受力f=μmg,后f=0
情景2
水平
v0>v,一直减速
受力f=μmg
v0>v,先减速再匀速
先受力f=μmg,后f=0
v0受力f=μmg
v0先受力f=μmg,后f=0
情景3
水平
传送带长度l<,滑块一直减速到达左端
受力f=μmg(方向一直向右)
传送带长度l≥,v0受力f=μmg(方向一直向右)
传送带长度l≥,v0>v,滑块先减速再向右加速,最后匀速,到达右端速度为v
减速和反向加速时受力f=μmg(方向一直向右),匀速运动f=0
情景4
倾斜
一直加速
受摩擦力f=μmgcosθ
先加速后匀速
先受摩擦力f=μmgcosθ,后f=mgsinθ
情景5
倾斜
一直加速
受摩擦力f=μmgcosθ
先加速后匀速
先受摩擦力f=μmgcosθ,后f=mgsinθ
先以加速度a1加速,后以加速度a2加速
先受摩擦力f=μmgcosθ,后受反向的摩擦力f=μmgcosθ
情景6
倾斜
一直加速
受摩擦力f=μmgcosθ
先加速后匀速
先受摩擦力f=μmgcosθ,后f=mgsinθ
一直匀速(v0>v)
受摩擦力f=mgsinθ
一直匀速(v0=v)
受摩擦力f=0
先以加速度a1加速,后以加速度a2加速
先受摩擦力f=μmgcosθ,后受反向的摩擦力f=μmgcosθ
情景7
倾斜
一直加速
受摩擦力f=μmgcosθ
一直匀速
受摩擦力f=mgsinθ
先减速后反向加速
受摩擦力f=μmgcosθ,
电磁感应难点突破
 升级会员
升级会员 