安川机器人远程控制总结机器人端.docx
《安川机器人远程控制总结机器人端.docx》由会员分享,可在线阅读,更多相关《安川机器人远程控制总结机器人端.docx(27页珍藏版)》请在冰豆网上搜索。
安川机器人远程控制总结机器人端
安川机器人远程控制总结
一、master程序
1、master程序的设置
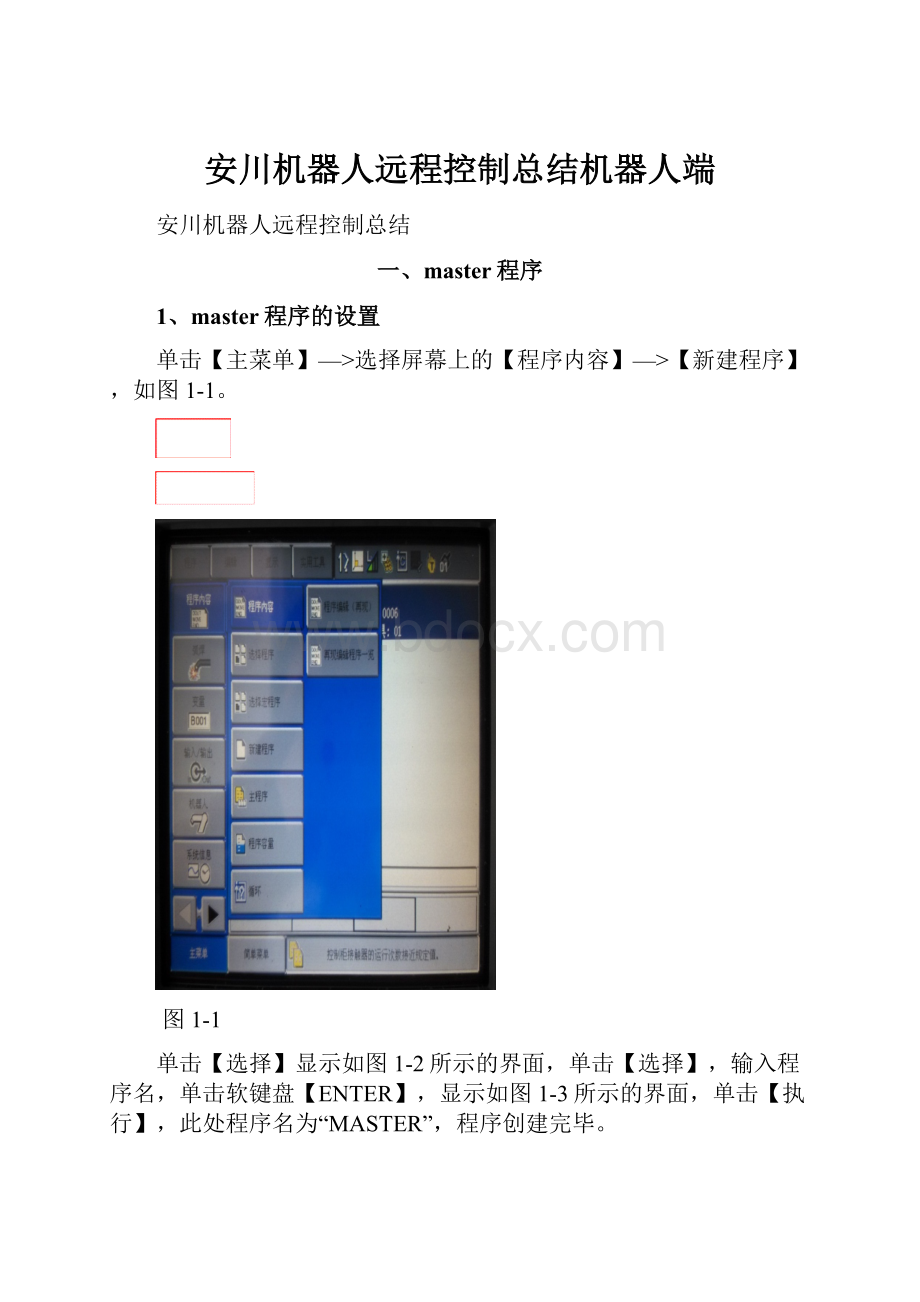
单击【主菜单】—>选择屏幕上的【程序内容】—>【新建程序】,如图1-1。
图1-1
单击【选择】显示如图1-2所示的界面,单击【选择】,输入程序名,单击软键盘【ENTER】,显示如图1-3所示的界面,单击【执行】,此处程序名为“MASTER”,程序创建完毕。
图1-2
图1-3
单击【主菜单】—>选择屏幕上的【程序内容】—>【主程序】,如图1-4。
图1-4
单击【选择】,显示如图1-5所示的设置主程序界面。
图1-5
单击【选择】,出现如图1-6所示的界面,单击【向下】选择“设置主程序”。
图1-6
显示如图1-7所示的界面,单击【向下】选择“MASTER”单击【选择】。
如图1-7
主程序设置完毕。
2、MASTER程序的编辑
单击【主菜单】—>选择【程序内容】—>【选择程序】—>【选择】,出现如图1-7所示的界面,单击【向下】,选择“MSATER”,单击【选择】。
在如图2-1所示的界面下编辑主程序。
图2-1
此处以2个工位,每个工位3种工件的工作站为例创建主程序内容,需要熟悉机器人示教器的基本操作(如【命令一览】【插入】【回车】【选择】)。
插入DOUTOT#
(1)OFF程序举例:
光标定位在左侧行号处,如图2-2,如图单击【命令一览】,选择【I/O】,单击【选择】,选择【DOUT】,如图2-3所示的界面
图2-2
图2-3
单击【选择】,显示如图2-4所示的界面,光标定位在“DOUT”上,单击【选择】,显示如图2-5所示的界面,光标定位到“数据”行的ON,单击【选择】,切换成“OFF”,单击两次【回车】则可出入该指令。
需要指出的是在光标定位处插入指令是向下插入。
图2-4
图2-5
程序内容如下(安装在机器人中的MASTER程序见附件MASTER):
第二行的NAME才是机器人控制器登录的程序名,单纯的修改文件名不能改变程序名
/JOB
//NAMEMASTER
//POS
///NPOS0,0,0,0,0,0
//INST
///DATE2016/06/0117:
13
///ATTRSC,RW
///GROUP1RB1
NOP
'
'=初始化=
DOUTOT#
(1)OFF
DOUTOT#
(2)OFF
'=初始化=
'
'=主程序=
*MAIN
'***工位1判断***
JUMP*JOB1IFIN#(6)=ON
'***工位2判断***
JUMP*JOB2IFIN#(7)=ON
'***无工位被选中***
JUMP*MAIN
'=主程序=
'
'=工位1工件选择程序=
*JOB1
'***把IGH#
(1)的4位赋给B000***
DINB000IGH#
(1)
'***当B000=1跳到*JOB1-1标签***
JUMP*JOB1-1IFB000=1
'***当B000=2跳到*JOB1-2标签***
JUMP*JOB1-2IFB000=2
'***当B000=3跳到*JOB1-3标签***
JUMP*JOB1-3IFB000=3
'***当无工件被选中,暂停***
PAUSE
JUMP*MAIN
'=工位1工件选择程序=
'
'=工位2工件选择程序=
*JOB2
'***把IGH#
(1)的4位赋给B000***
DINB000IGH#
(1)
'***当B000=1跳到*JOB2-1标签***
JUMP*JOB2-1IFB000=1
'***当B000=2跳到*JOB2-2标签***
JUMP*JOB2-2IFB000=2
'***当B000=3跳到*JOB2-3标签***
JUMP*JOB2-3IFB000=3
'***当无工件被选中,暂停***
PAUSE
JUMP*MAIN
'=工位2工件选择程序=
'
'=工位1的1#工件焊接调用=
*JOB1-1
DOUTOT#
(1)ON
CALLJOB:
JOB1-1
DOUTOT#
(1)OFF
JUMP*MAIN
'=工位1的1#工件焊接调用=
'
'=工位1的2#工件焊接调用=
*JOB1-2
DOUTOT#
(1)ON
CALLJOB:
JOB1-2
DOUTOT#
(1)OFF
JUMP*MAIN
'=工位1的2#工件焊接调用=
'
'=工位1的3#工件焊接调用=
*JOB1-3
DOUTOT#
(1)ON
CALLJOB:
JOB1-3
DOUTOT#
(1)OFF
JUMP*MAIN
'=工位1的3#工件焊接调用=
'
'=工位2的1#工件焊接调用=
*JOB2-1
DOUTOT#
(2)ON
CALLJOB:
JOB2-1
DOUTOT#
(2)OFF
JUMP*MAIN
'=工位2的1#工件焊接调用=
'
'=工位2的2#工件焊接调用=
*JOB2-2
DOUTOT#
(2)ON
CALLJOB:
JOB2-2
DOUTOT#
(2)OFF
JUMP*MAIN
'=工位2的2#工件焊接调用=
'
'=工位2的3#工件焊接调用=
*JOB2-3
DOUTOT#
(2)ON
CALLJOB:
JOB2-3
DOUTOT#
(2)OFF
JUMP*MAIN
'=工位2的3#工件焊接调用=
END
指令含义如下:
IGH#()指令包含4个点,IGH#
(1)包含IN#
(1)—IN#(4),依次类推
二、安川IO基板及端子台
1、IO基板和端子台介绍
机器人控制柜标配后面板4个机器人通用IO基板CN306~CN309(共40个IO,但是通用IO只有24个,其余16个作为专用IO,IO均是NPN信号,其中的CN307上的OUT17---OUT24为继电器输出,注意订货时端子板和数据连接线是否需另外购买。
)和1个机械安全端子台基板CN219;机械安全端子台IO中的21和22号端子为外部启动所需的“开启外部伺服”(时序图中的“伺服开启”,时序图如图1-2所示),如图1-1所示;通用IO端子台CN308中的B1端子为外部启动所需的“外部启动”。
在上文的“MASTER程序编辑”中是把工件编码接到IGH#
(1)上,然后转存到了B000中。
自此,启动时序和工件编码介绍完毕,按照上述介绍接线即可完成机器人的启动和焊接程序的调用。
接线图如图1-1和1-3所示
另外,IO的COM口连接在机器人背面的CN303上,出厂时1和3短接、2和4短接,需要将两个跳线拆除,将外部电源连接在1/2口。
图1-1
图1-2
图1-3
2、机器人通用IO基板CN306~CN309对应机器人地址的修改
机器人外部输入输出物理接口与机器人地址关系一一对应,如时序图中的“外部启动”对应CN308上的B1,并将信号传送到机器人地址20010,这是机器人的默认出厂设置,此设置可在机器人的用户梯形图中设置和修改。
具体操作方法如下:
用户梯形图修改方法与用法:
单击【主菜单】—>选择屏幕上的【系统信息】—>【安全模式】,如图2-1。
图2-1
单击【选择】,显示如图2-2所示的界面
图2-2
单击【选择】,单击【向下】选择“管理模式”,输入密码,单击【回车】,显示如图2-3所示的界面,即进入“管理模式”
图2-3
单击【主菜单】—>选择屏幕上的【输入输出】—>【梯形图程序】,如图2-4。
图2-4
单击【选择】,显示如图2-5所示的界面(如果显示“系统梯形图”,则单击顶部的【显示】切换成用户梯形图)
图2-5
将光标移到指令部分,单击【选择】,显示如图2-6所示的界面
图2-6
将光标移到地址处,单击【选择】,显示如图2-7所示的界面,输入继电器标号20034,单击两次【回车】,显示如图2-8所示的界面
图2-7
图2-8
单击如图2-9所示的界面左上角的【数据】,选择【编译】,单击【选择】,显示如图2-10所示的界面,选择【是】,单击【选择】
图2-9
图2-10
自此,修改完毕后,机器人“外部启动”更改到IN5,当IN5(CN309上的B5)有信号输入时,20034有效,CN308上的B1端子不再具有外部启动的功能。
此外,用户梯形图还可以增加内容来实现更多的功能。
注:
修改输出端口,需要将用户梯形图的最后一行做修改(BMOV#10010,494,#30030,将10010后的494个字节传送到30030),30030之后的494个字节只有通过内部地址连接后,才能正常输出,所以当需要修改端子台地址的时候,需要将30030之后所需要的位数让出来,剩余的如果不足一个字节,则用位传送指令STR传送。
例如,将CN308端子台上的30010改到CN309上的30030,将30011改到30031,将30013改到30032,将30015改到30033,将30014改到30034,需要在用户梯形图中做如下修改:
BMOV#10020,493,#30040
STR#10015
OUT#30035
STR#10016
BMOV#10010,494,#30030改成OUT#30036
STR#10017
OUT#30037
STR#50070
OUT#30010(改成30030)
STR#50073
OUT#30011(改成30031)
STR#70020
OUT#30013(改成30032)
OR#50056
OUT#30015(改成30033)
STR#50015
OR#50016
OUT#30014(改成30034)
端子台接线图参照DX200使用说明书的第14-51页
操作过程中发现的问题总结:
1、命令一览众的MOVL和单击【选择】直接插入的MOVL有什么区别?
命令一览中的MOVL需要使用P000-P127中的位置变量,这些位置型变量是全局变量,且只有127个,不宜用作工作程序中的示教点;单击【选择】直接插入的MOVL不用使用P000-P127这些全局变量,会在程序内部新建局部变量(示教器中看不到,需要在电脑上用文本文档打开才能看到这些局部变量)
2、单击【选择】直接插入的MOVL,MOVC,MOJ指令如何插入和切换?
原则为先插入到程序中再切换修改
将光标定位在左侧行号,单击【选择】,使能后点击【回车】,出现如图2-1所示的界面
图2-1
如果想插入的不是MOVJ,而是MOVL,则将光标定位到右侧指令处,如图2-2
图2-2
单击【选择】,然后按住【转换】+【向下】就可以在几个指令之间切换,直到下方显示MOVL,如图2-3所示,单击【回车】就完成了插入MOVL指令,如图2-4
图2-3
图2-4
3、编程示教的过程中如何更换工具和修改已编程序的工具号?
工具号如何显示?
在程序中单击【显示】—>【显示工具号】
更换工具:
按【转换】+【坐标】,按【向下】选则想要的工具,再按【转换】+【坐标】,以后新插入的指令所用工具都为新选择的工具。
修改已编程序的工具号:
选择想要修改工具号的行,并将光标定位在行号上,按【转换】+【坐标】,按【向下】选则想要的工具,再按【转换】+【坐标】,单击【修改】,使能后单击【回车】,就完成了修改。
工具号
行号
图3-1
4、如何删除程序文件?
在程序一览画面下选择想要删除的程序文件,单击【切换】+【选择】,该程序名前方会出现一个黑色的实心圆点,然后单击【程序】—>【删除程序】
5、如何删除程序中的多条指令?
将光标定位在想要删除的第一行的指令侧,按【转换】+【选择】,该行的行号变成蓝色背景,然后单击【向下】可以多选程序,选择完毕后,单击【编辑】—>【剪切】或【注释化】就可以删除。
如图5-1
如果想要取消注释化,就将光标定位到想取消注释化的行的指令侧,单击【总括注释化解除】就会将所有注释化的行解除注释化。
如图5-2
图5-1
图5-2
6、程序的注释要求
7、如何将程序文件导出到USB设备?
如何将程序文件通过USB设备导入到机器人控制器?
如何将程序文件导出到USB设备:
将USB设备插入到示教器(或控制柜内的USB口)单击【主菜单】—>选择屏幕上的【外部存储】—>【装置】,选择“USB:
示教编程”(或USB1:
控制柜(%s),或USB2:
控制柜(%s)),单击【主菜单】—>选择屏幕上的【外部存储】—>【保存】,选择“程序”,单击【选择】,选择想要保存的程序文件,单击【选择】,程序名前方会显示一个黑色五角星,单击【回车】,保存完成。
如何将程序文件通过USB设备导入到机器人控制器?
将USB设备插入到示教器(或控制柜内的USB口)单击【主菜单】—>选择屏幕上的【外部存储】—>【装置】,选择“USB:
示教编程”(或USB1:
控制柜(%s),或USB2:
控制柜(%s)),单击【主菜单】—>选择屏幕上的【外部存储】—>【安装】,选择“程序”,单击【选择】,选择想要安装的程序文件,单击【选择】,程序名前方会显示一个黑色五角星,单击【回车】,安装完成。
需要指出的是,导出的程序文件,需要经过在电脑上修改程序文件内部的名(文本的第二行NAME)后才能导入到机器人控制器,或者将机器人控制器中的同名程序文件删除。
否则安装时会提示“错误2040:
已登录的程序名”。
 升级会员
升级会员 