基于自适应模糊PID控制的沸腾干燥机流化仓温度控制.docx
《基于自适应模糊PID控制的沸腾干燥机流化仓温度控制.docx》由会员分享,可在线阅读,更多相关《基于自适应模糊PID控制的沸腾干燥机流化仓温度控制.docx(19页珍藏版)》请在冰豆网上搜索。
基于自适应模糊PID控制的沸腾干燥机流化仓温度控制
基于自适应模糊PID控制的沸腾干燥机流化仓温度控制
根据沸腾干燥机的工艺介绍得知:
沸腾干燥机的流化仓内部温度对药物颗粒的干燥程度是否达标起着至关重要的作用。
因此,研究目标是使得沸腾干燥机流化仓内部的温度快速精确地稳定在目标值。
1、被控对象介绍
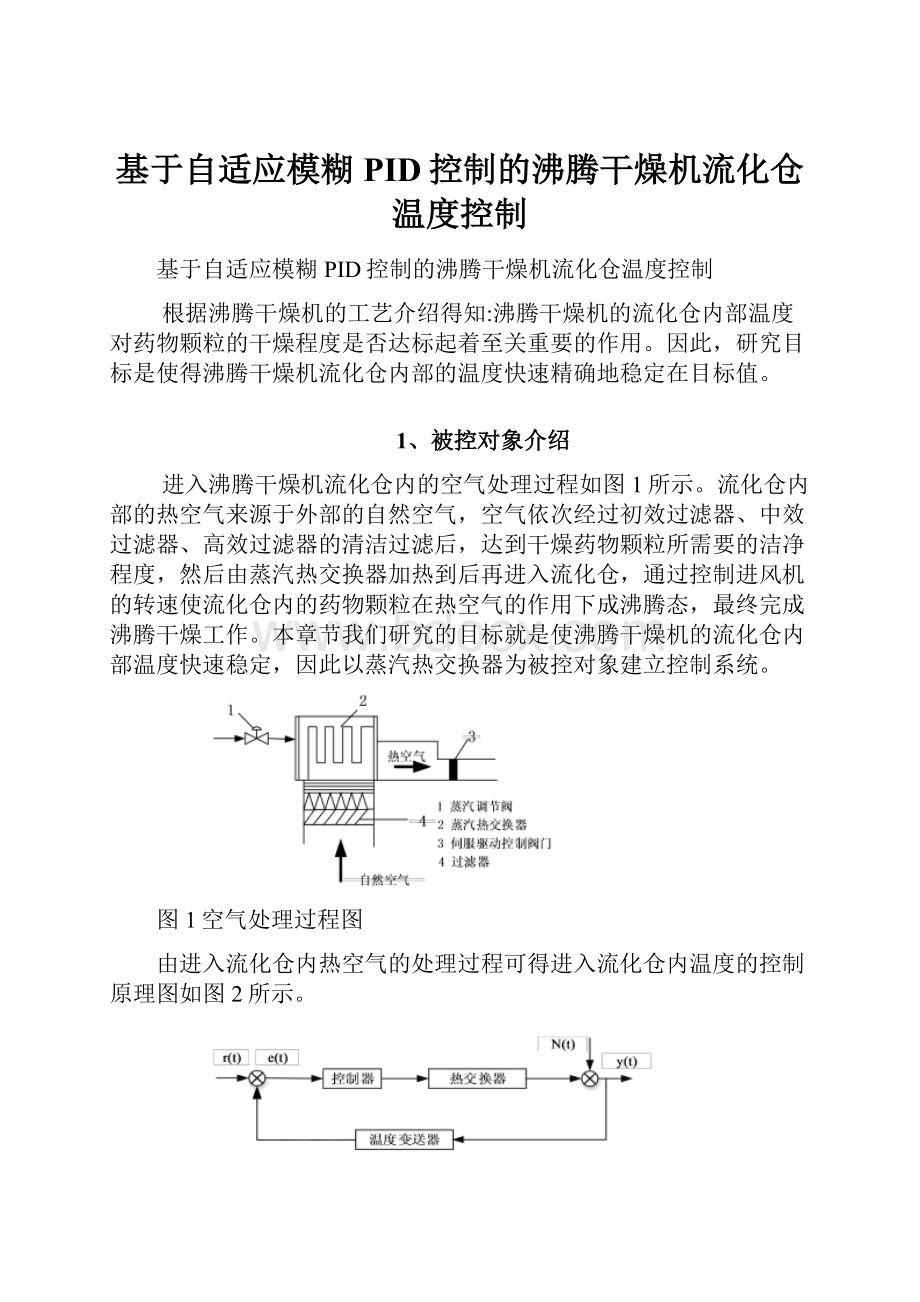
进入沸腾干燥机流化仓内的空气处理过程如图1所示。
流化仓内部的热空气来源于外部的自然空气,空气依次经过初效过滤器、中效过滤器、高效过滤器的清洁过滤后,达到干燥药物颗粒所需要的洁净程度,然后由蒸汽热交换器加热到后再进入流化仓,通过控制进风机的转速使流化仓内的药物颗粒在热空气的作用下成沸腾态,最终完成沸腾干燥工作。
本章节我们研究的目标就是使沸腾干燥机的流化仓内部温度快速稳定,因此以蒸汽热交换器为被控对象建立控制系统。
图1空气处理过程图
由进入流化仓内热空气的处理过程可得进入流化仓内温度的控制原理图如图2所示。
图2流化仓内部温度控制原理图
热交换器的作用是将能量从高温介质传送到低温介质,通过能量的传递,使高温介质或低温介质的温度达到工业生产的要求,并投入到实际的生产中。
根据能量传递方式的不同,热交换器有蓄热式、混合式、间壁式三大类。
蓄热式热交换器的热交换原理如下:
高温介质和低温介质依次流过同一表面,实现能量的交换。
混合式热交换器是通过高温介质和低温介质的相互接触实现能量的传递。
间壁式热交换器将高温介质和低温介质置于壁面两端,通过间接性的接触实现能量的传递。
其中翅片管式的交叉流换热器由于具有结构紧凑、传热能力强、不易结垢等优点得到广泛的应用。
热交换器的性能好坏是通过传热性能以及流体阻力性能这两个参数来体现的。
而传热性能的好坏则是通过传热系数和对流换热系数来反映。
传热系数和热对流系数的大小受换热器的结构、尺寸、壁面材料的导热系数、流体密度、流体动力粘度等因素的影响。
身处能源危机的时代,实际生产过程中,必须时刻警惕对能源的浪费。
因此,了解并改善换热器的传热性能和流体阻力性能对促进能源的开发以及提高能源利用率有着十分重要的意义。
通过查阅资料可得热交换器的传热系数公式如式所示。
由传热过程的量纲分析法可得对流传热系数与雷诺系数Re、普朗特数Pr之间的关系描述如式所示。
示雷诺数,表示流体的流动状态。
当Re的取值相对大时,表示流体在流动过程中分子间的粘性力大于流动时的惯性力,此时流动较不稳定会产生较大的流动摩擦损失。
与之相反,当Re较小时,表示流体在流动过程中分子间的粘性力大于流动时的惯性力。
式中a表示对流换热系数,l表示定性尺寸,兄表示换热器传热材料的导热系数,、表示流速,v表示运动粘度。
根据上述的公式描述,在实验测试的条件下便可获得换热器的换热系数和对流换热系数。
从而完成对换热器整体性能的评估。
大多数传统工业领域,对温度的控制是否能取得良好的控制效果,决定着工业生产能否按预期进行。
如在湿法制粒片剂生产过程的沸腾干燥阶段与包衣阶段,经热交换器处理的空气能否快速精确达到设定值要求,决定着最终片剂的生产质量与生产效率。
因此,必须保证热交换器传热过程的顺利进行,确保进行热交换的冷热介质最终能投入到工业生产中。
另一方面,必须确保换热器具有良好的传热性能,避免对能源造成过多不必要的浪费。
热交换器温度的控制实现如下:
将高温介质的流量作为控制量,被加热介质的出口温度作为被控制量,通过流量调节阀的调节,控制高温介质的流量现实对被加热介质温度的控制。
控制算法通常采用传统的PID控制,这种算法在对参数时变、干扰众多的热交换器出口介质温度控制时,往往不能取得良好的控制效果。
根据生产得知影响沸腾干燥机流化仓内部温度的因素包括:
外界自然空气的温度、流量以及蒸汽温度和热交换器的换热能力。
一般情况下外界自然空气的温度、热蒸汽的温度都存在扰动导致进入流化仓内部的空气温度不稳定。
研究中选取换热器进口蒸汽流量作为控制量,通过调节热蒸汽的流量调节阀开度控制进入流化仓内的空气温度,从而控制流化仓内部的温度值。
当内部温度比预设值高时则减小流量调节阀的开度使蒸汽流量减小;当内部温度比预设值低时则加大流量调节阀的开度使蒸汽流量增加。
2确立被控对象的数学模型
2.1机理分析
工业控制中,一般通过实验法和解析法确定被控对象的数学模型。
实验法亦即系统辨识法,根据具体实现方法的不同,实验法又包括参数模型辨识法和非参数模型辨识法。
非参数模型辨识法的实现过程:
给被控对象一个测试信号,并观察在该输入作用下的输出响应曲线,然后用适当的数学模型逐渐逼近直至误差最小。
非参数模型辨识法可在不确定被控对象具体结构时,假设该对象为线性系统来确定,这种辨识过程可适用于任意复杂的控制过程。
参数模型辨识法的实现过程:
针对被控对象的输入输出关系假定一种模型结构,通过计算使模型输出与实际输出的差值最小,确定模型参数进而确定对象模型。
解析法是在考虑系统各个环节之间相互联系的前提下,根据它们所依据的相关学科的基本定律列写对应的运动方程最终求解对象的数学模型。
该方法在求解被控对象较为简单的情况下可显出事半功倍的作用,当被控对象的规律复杂化时则难以推到出精确的数学模型。
分析蒸汽热交换器的热传输过程,改变流量的热蒸汽在热交换器的作用下与自然空气进行热交换,达到与进入流化仓内空气进行能量交换的目的,并最
终影响进入流化仓内部温度。
因此该过程存在较大的滞后。
另一方面,由于换热过程存在较大的热阻,影响热交换的速度,这说明系统存在较大的时延。
当扰动出现时,被控对象不能及时响应,故而引起调节过程出现较长的过渡时间和较大的超调。
综上,无论从机理分析方面或是工程实践方面考虑都表明,被控对象都是一种惯性和时间滞后均较大的系统,因此我们考虑用实验法建立被控对象的数学模型。
2.2模型估计及参数确定
实际的工程应用中,通常根据领域专家的实际经验或者被控对象的时测输入输出数据来估计被控对象的模型结构。
对于模型阶次较高的模型进行相应的低阶近似处理,求解被控对象模型参数。
实践表明该方法所得模型与实际对象存在极为接近的近似度。
通过上一小节对被控对象的机理分析以及传热基础理论的了解,被控对象的动态特性可表示为一阶带滞后的模型,其表示为:
式中:
K为系统的放大系数,该系数反映对象的稳态性能;T为时间常数,反映被控过程的响应速度;公为滞后时间。
根据非参数模型辨识法中的阶跃响应法确定对象模型的各项参数。
具体实现过程如下:
在蒸汽热交换器的输入端加入一个阶跃信号,并记录在该扰动作用下的系统阶跃响应曲线,得曲线图如图3所示。
图3热交换器阶跃响应曲线图
在上述过程所得的曲线图中分别28.3%以及63.2%找到实际输出达到输入时的时间坐标t1和t2。
并由下式计算对象模型的各项参数。
对得到的换热器数学模型做阶跃输入仿真,结果如图4所示。
将响应曲
线与上述实际阶跃响应曲线进行比较,可以看出蒸汽热交换器的实际动态模型的阶跃响应曲线与预测阶跃响应曲线趋势基本一致,验证了建立模型的正确性。
图4阶跃响应仿真曲线图
3传统的PID控制算法
目前的实际生产中,对进入沸腾干燥机的流化仓内部温度调节仍旧采用传统的PID控制算法。
由于PID控制算法本身比较简单,稳定性好,可靠性高,比例、积分、微分、参数调节方便使其在传统的控制领域得到广泛的应用,成为历史最久、应用最广泛的基本控制算法。
PID算法对很多工业控制系统尤其是线性定常系统的控制非常有效。
迄今为止,蒸汽热交换器的温度控制大多仍采用传统的PID控制算法,PID控制系统的原理框图如图5所示。
图5PID控制原理框图
如果过大系统可能会出现提前制动降低系统的抗干扰性能。
PID的比例、积分、微分参数的确定可根据Ziegler和Nichols提出的方法确定。
对于一阶带时延系统而言,在知道放大系数K、时间常数T以及滞后时间r的情况下其整定方法如表1所示。
表1控制器整定公式
根据整定结果并结合实际的调试,确定最终的比例、积分、微分参数分别为
。
在Simulink的仿真环境下建立流化仓内温度控制的PID控制仿真模型,得到仿真结果如图6所示。
图6常规PID控制单位阶跃响应
由上述阶跃响应图可见PID控制算法的调节虽然不存在稳态误差,但系统的超调量较大,与此同时,系统到达稳定的时间也较长。
因此,为了提高PID算法的控制效果,研究用模糊控制算法实时调节PID算法的各项控制参数,使得比例、积分、微分参数根据实际情况自行调节从而改善对被控对象的控制效果以满足实际的生产。
4模糊控制
模糊控制诞生于上世纪六十年代,是一种以模糊推理和模糊逻辑为基础的具有闭环结构的控制理论。
模糊控制以Fuzzy数学、Fuzzy语言形式的知识表示,运用模糊逻辑推理方法,将现场操作人员用自然语言描述的手动控制策略形式化成计算机可以接受的算法语言,是一种模型化的仿人类思维的控制方法。
随着科技的发展,现代工业控制系统中对象的复杂程度急剧提高,导致难以建立精确的系统数学模型,从而使得传统的控制策略显得无能为力。
但模糊控制通过模拟人类专家的控制经验,通过推理和决策实现对被控对象的控制,并不需要知道被控对象精确的数学模型。
除此之外,模糊控制在处理控制过程复杂、不确定性严重的被控对象时具有得天独厚的优势。
4.1模糊控制的特点
(1)模糊控制系统是模拟人对被控对象的控制策略,因此对对象数学模型精确建立的要求条件相对宽泛。
(2)控制规则作为模糊控制的核心,是根据操作人员的实践经验得到,并最终通过人类的语言表示的,这种控制规则、策略的表述也便于操作人员理解,使控制效果更加完美。
(3)从模糊控制的实现上来说,被控对象的输出值与设定值比较结果须经过模数转换才能作用于控制器,控制器的输出信号是数字信号也必须经过数模转换才能作用于被控对象。
(4)模糊控制系统具有良好的鲁棒性和适应性,对于一些具有时滞时变的非线性大滞后的复杂工业控制系统,具有良好的抗干扰能力。
4.2模糊控制原理
模糊控制系统的工作原理如图7所示。
作为闭环的负反馈系统,其工作的过程如下:
传感器采集来的被控对象的输出信号与给定值进行差值运算得到偏差信号,偏差信号经过A/D转换后输入到模糊控制器。
然后经过模糊控制器计算并输出数字控制信号,数字信号经过D/A转换后作用于执行机构,进而控制被控对象。
即使外部干扰的存在使得控制量偏离目标值控制器也会做出积极的反映。
图7糊控制系统原理框图
模糊控制系统的主要组成部分包括:
模糊化接口、知识库、模糊推理机、模糊判决接口、去模糊化接口。
1)模糊化接口根据在输入论域上定义的模糊语言值,将以标量形式表示的被控对象的实际输出与设定值的偏差值转化为相应的语言值的隶属度向量。
向量包含的分量的个数与相应论域包含的元素个数相关。
模糊化接口的输入信号的个数可以为一个、两个、甚至三个,但一般情况下为偏差和偏差的变化率。
论域上定义的语言值的多少根据对象的控制精度而定。
2)知识库是根据现场操作人员的控制经验设计而来,可通过一定的学习方法实现知识库的在线更新。
由于基本论域是输入输出变量的实际论域,而模糊论域是对基本论域量化得到的含有有限元素的论域,因此,数据库必须对基本论域转化为模糊论域时的量化方式、量化等级的个数与取值、最终输出转化为控制信号的比例因子取值、语言值隶属函数的参数取值和类型等进行定义。
规则库则表示模糊规则以及多个模糊规则之间的模糊关系
3)推理机的主要作用是根据知识库提供的信息模拟人的推理过程计算出合适的模糊输出。
推理机的输出是一个模糊集合,由隶属度向量表示,而向量包含的分量个数与输出论域上元素的个数一致。
与此同时,其输出结果不一定是输出论域上定义的语言值,更多时候是语言值的混合作用,因此其隶属度函数的形状不会很规则。
4)模糊控制器的最终输出需要经过处理得到确定的值才能作用于被控对象。
这个过程就是推理结果的精确化过程亦即去模糊化过程,该过程由模糊判决接口完成。
模糊控制器的基本结构图如图8所示。
图8模糊控制器基本结构图
5模糊控制器的设计
概括来讲,模糊控制器的设计主要由以下部分组成:
1)确定模糊控制器的输入变量以及输出变量;
2)归纳和总结模糊控制器的模糊控制规则;
3)确定模糊化以及去模糊化的方法;
4)明确模糊控制器输入变量输出变量的模糊论域,根据实际论域确定量化因子以及比例因子。
5.1模糊控制器的结构确定
模糊控制器的结构确定的实质就是对输入输出变量个数的确定。
被控对象己知的情况下,系统输出变量的个数是唯一确定的。
而输入变量的个数不定。
模糊控制器的控制规则归根结底是要仿照人的思维模式。
操作人员依据误差、误差的变化率对现场设备进行控制。
因此,在设计过程中也取上述两个变量作为控制器的输入变量。
一般情况下,控制器的输入变量的个数越多,其控制精度越高。
但是输入变量个数的增加将会使控制规则的设计变得困难起来,因此一般情况下选择二维模糊控制器是最佳的。
实际生产过程中,由于现场的操作人员对误差变化率的变化率感觉最迟钝,对系统的偏差最敏感,因此,通常也是选择偏差以及偏差的变化率作为控制器的输入。
5.2模糊控制规则
作为模糊控制器设计的核心,模糊控制规则由选择输入变量输出变量的语言值,定义各语言值隶属函数以及最后模糊规则的建立三部分组成。
5.2.1输入输出变量语言值的确定
人们在口常生活中对事物特性的习惯性描述可以为输入输出语言值的选择提供借鉴。
比如:
人们习惯性把年龄划分为“青”、“中”、“老”;体积划分为“小”、“中”、“大”;身高划分为“矮”、“中”、“高”等。
在模糊控制器的设计中,人们通常的选择是将描述控制器输入输出的状态用“小”、“中”、“大”等量化词进行描述。
加上正、负、零的概念,输入输出的状态将会有七个。
用英文缩写表示为:
。
模糊控制器设计时,其语言值的选取也不是固定的,可以用七个值表示也可以用三个、五个值表示,如果加上正负零的概念甚至可以用八个值来表示。
但最终语言值个数的选取将会根据系统的需要来决定。
输入输出语言值个数少,对输入输出变量的描述将会缺乏细腻,使得控制效果变差,这对一些控制要求不是很高的系统来说也不失为一个选择。
随着语言值的增多,控制规则将会越来越复杂,但整个系统的控制效果将会显著提升。
5.2.2语言值隶属度函数确定
要清楚的说明一个模糊集合就必须确定其隶属函数,语言变量的每个状态都对应一个模糊子集,只要确定了模糊子集的隶属度函数,也就确定了一个模糊子集。
对于隶属函数的选取我们必须注意一下两点:
1)隶属函数的曲线与系统性能的关系。
即使模糊子集的隶属函数相同,其曲线形状的不同也将会造成最终的控制效果差别十分明显,如图9所示。
曲线形状越尖,在相同输入变化条件下导致的隶属度变化最大如曲线A所示,我们也可以称曲线A的分辨率最高。
同理,可以看出曲线C的分辨率最小。
而模糊集合的控制灵敏度也随着分辨率的提高变高,分辨率越高,控制灵敏度越高。
因此在定义语言值的时候我们必须注意:
当设定值与实际测量值的差值相对较小时选取的隶属函数应具有较高的分辨率,当设定值与实际测量值的差值相对较大时选取的隶属函数应具有较小的分辨率。
图9不同形状的隶属函数图
2)隶属函数的分布与系统性能的关系。
在定义语言值时我们要求语言值的隶属函数具有较好的分布性,即所有语言值在整个论域的分布上不应该出现空档,如图10所示。
这样做的目的是无论输入输出在论域上的哪个点取值,该元素对应的语言值至少有一个隶属度大于零,从而使得与该语言值相关的模糊控制规则能够被激活。
于此同时,即使没有空档,如果论域中的元素对所有语言值的隶属度太小也是不可行的,因为过小将会导致在对应元素附近将会出现不灵敏区。
图10语言值隶属函数交叉程度图
5.2.3建立模糊控制规则
模糊控制规则的建立是模糊控制器设计的关键环节,模糊控制规则来源于生产实践里现场操作人员归纳的控制策略。
手动控制策略是人们通过对被控对象的观察、学习、归纳、总结慢慢形成的存储到大脑中的知识集合。
建立模糊控制规则必须注意一下几点:
1)模糊控制规则的数量要根据控制要求合理选择。
理论上,系统的控制规则少控制精度会降低但系统的运行速率会很快,而控制规则多的时候控制精度提高了,但系统的实时性将会变差。
2)控制规则的内容不能前后矛盾,即相同的控制前件应导致相同的后件。
3)控制规则的分布要在整个输入论域上具有完备性,避免控制盲区的出现。
5.3模糊化方法和去模糊化方法
就本质而言,模糊化就是将论域上的标量转化为向量即模糊集合的过程。
模糊化过程如下:
当某一精确值对应某一语言值的隶属度最大,那么就将该语言值作为精确量的模糊化结果;而当一个精确量对应的隶属度最大的语言值不止一个的时候,如某一精确量对应PB、PS的隶属度最大且为0.7,那么该精确量在PB、PS上的隶属度均为1。
不同于模糊化过程,去模糊是将向量转化成标量的。
由于经由模糊推理得到一个模糊量,而要驱动执行机构动作必须需要一个确定值,因此必须取最能代表模糊推理结果的精确量作为控制信号,这一过程成为去模糊化。
常用的去模糊化方法包括最大隶属度法、重心法、中位数法。
1)最大隶属度法是将隶属度最大的值作为去模糊化结果。
如果最大隶属度所对应的元素个数大于等于两个,那么将对上述元素求取平均值作为最终的去模糊化结果。
由于最大隶属度法忽略隶属函数的形状完全忽略了隶属度值较小的其它点,难免造成信息的丢失。
重心法得到的去模糊化结果相对其他去模糊化方法较平滑,因为这种方法考虑到输出论域中每个元素的信息。
信息缺乏足够的重视。
5.4量化因子和比例因子的确定
1)量化因子。
偏差以及偏差变化率的基本论域的元素必须乘以量化因子才能得到模糊论域的元素进而用于模糊推理。
记偏差的量化因子为k,
由此可见量化因子实际是起到了量化增益的作用。
ke对系统性能的影响:
由上式得
,因此当偏差。
保持不变而系统其他参数给定的情况下减小,也就减小了误差e的模糊论域。
当ke的取值过小的时候,将会导致被控对象的响应速率变慢。
同理得偏差变化率的量化因子为:
6自适应模糊PID控制以及在温度控制中的应用
自适应模糊P1D控制算法是对传统的P1D控制算法的一种改进。
根据系统e和ec。
的实际测量值和变化趋势情况,利用规则库进行模糊推理,实现对P1D参数在线调整的一种自适应调节控制,其系统的结构如图11所示。
图11自适应模糊控制基本结构图
结构图中,主要部分为模糊控制器(模糊推理部分)和PID控制器。
输出值与设定目标值之间的差值即偏差以及偏差的变化率作为控制器的输入。
根据e和ec。
与PID参数之间的模糊调节关系进行在线的模糊推理。
输出为PID控制器的各项参数的变化值。
最终将得到的修正参数带入下式。
6.1自适应模糊PID的实现
1)输入输出确定。
在对进入沸腾干燥机流化仓内的空气温度进行控制时,采用二维模糊控制器,温度的设定值与实测值之间的e和ec。
作为模糊控制器的输入,经过模糊推理后对PID的参数进行调整,输出分别是PID的比例,积分,微分的修正参数
。
ki取值越大。
控制规则表如表2、表3、表4所示。
表2比例控制规则表
表3积分控制规则表
表4微分控制规则表
3)根据实际工艺情况,设定温度偏差。
的基本论域为[-6060],ec的基本论域取[-33],两者的模糊论域均为[-66]。
kp的论域为[-0.050.05],模糊论域为[-0.80.8];ski的论域为[-0.2,0.2],模糊论域为[-0.5,0.5];kd的论域为[-2,2],模
模型图如图12所示,其模糊规则的编辑如图13所示。
图12模糊控制部分结构模型图
图13模糊控制规则的编辑图
采用Matlab/Simulink进行控制系统仿真。
根据输入信号的偏差及其变化率,采用三个模糊控制器分别对PID修正参数进行在线的微调整。
控制系统的仿真框图如图14所示。
图14系统仿真结构图
最终得基于自适应模糊PID控制算法的温度控制系统仿真结果如图15所示
图15自适应模糊PID仿真结果图
通过比较发现,在自适应模糊PID控制作用下系统不仅响应速度快,无稳态误差,而且超调量极小。
因此可以对沸腾干燥机流化仓内的温度控制取得良好的控制效果。
 升级会员
升级会员 