差动保护及比率差动保护.docx
《差动保护及比率差动保护.docx》由会员分享,可在线阅读,更多相关《差动保护及比率差动保护.docx(11页珍藏版)》请在冰豆网上搜索。
差动保护及比率差动保护
差动保护主要是部短路的保护,但当外部故障时有不平衡电流可能穿越差动保护电流互感器,造成差动保护误动作。
因此为了躲过外部故障时不平衡电流引起差动保护动作,采用了制动电流来平衡穿越电流引起差动保护的启动电流。
发电机采用机端电流作为制动电流,能在外部短路时取得足够的制动电流,又能在部短路时减少中性点电流的制动作用。
变压器采用二次谐波作为励磁涌流闭锁判据。
7[.M `5F-t#g'{!
U&z+Q)_6p 一般设有CT断线闭锁保护。
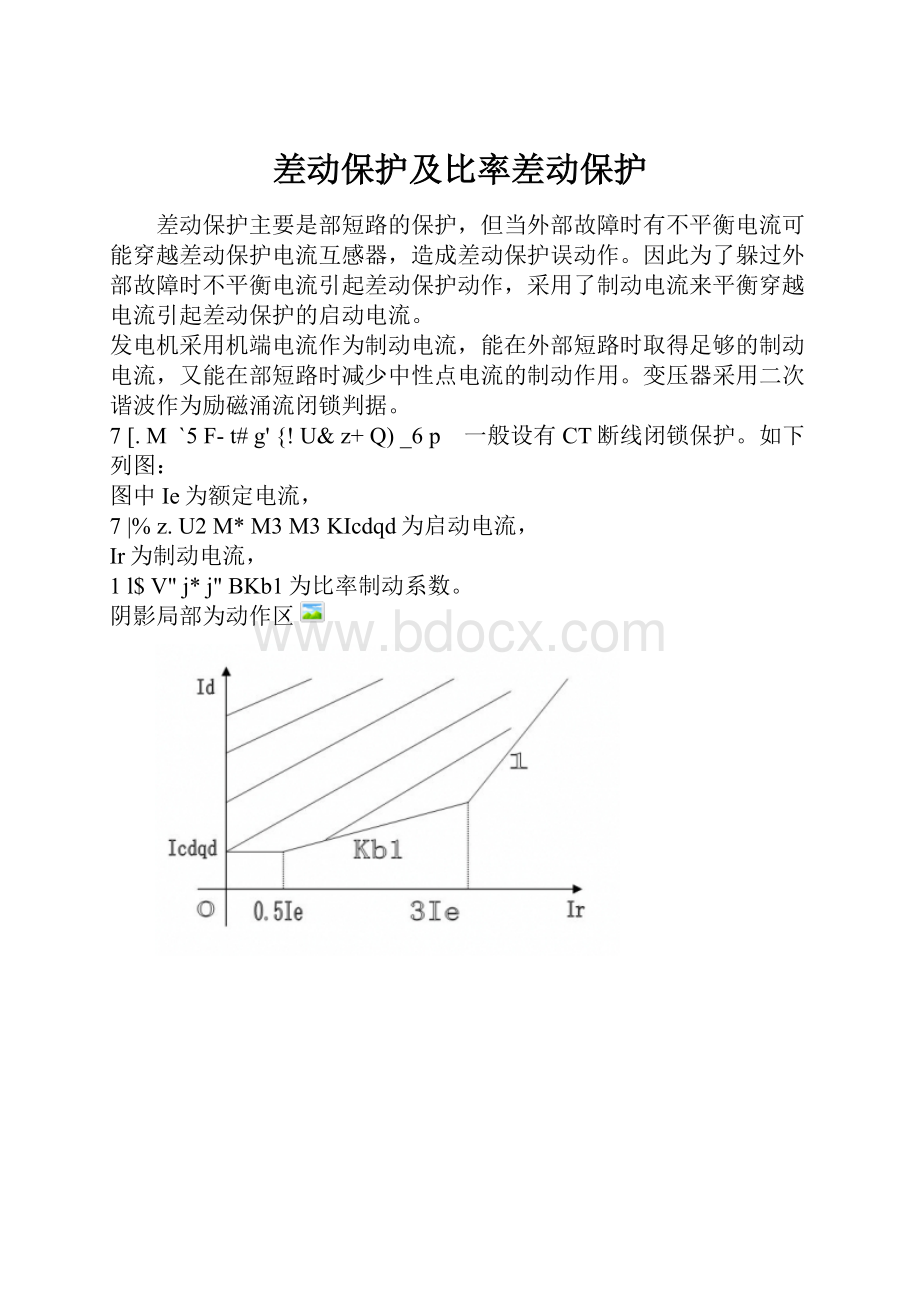
如下列图:
图中Ie为额定电流,
7|%z.U2M*M3M3KIcdqd为启动电流,
Ir为制动电流,
1l$V"j*j"BKb1为比率制动系数。
阴影局部为动作区
差动保护灵敏度与启动电流、制动系数和原理之间的关系摘要:
分析了差动保护的有关整定原那么,明确提出了差动保护的灵敏度与许多因素有关,如定值、原理和实现方式等。
不能仅改变某一个因素(如定值)来提高灵敏度,而需要综合考虑各个因素的影响,否那么适得其反。
0 引言
随着继电保护技术的不断开展和进步,技术人员对保护的认识越来越深刻,对许多继电保护约定俗成的做法开场了反思。
如规程上对差动保护规定:
使用比率制动原理的差动保护,不要校核灵敏度,其灵敏度自然满足。
那么这个“自然满足〞的灵敏度是什么灵敏度呢?
其实对发电机差动保护而言,就是在发电机机端发生两相短路,该差动继电器的灵敏度校验结果肯定能够满足要求;在现场运行过程中,经常有人将保护中的比率制动系数和比率制动斜率混淆,终究这两个概念有什么区别,又有什么联系?
标积制动原理对提高差动保护的灵敏度有什么有利的地方,它和比率制动之间又有什么关系,它们之间从根本上是否一致呢?
本文就这些用户所关心的问题展开深入的分析和讨论,并说明作者自己的观点[1,2]。
1 差动保护灵敏度系数的定义与校验
6y%K(X*`$S"e9^ 设流入发电机的电流为正方向,取继电电器差动电流Id为:
Z;G-L"H%'a1U%G
5K,i!
m)y(|7j5V6e式中:
Iop为当时动作电流的整定值。
发电机差动保护的灵敏度是指在发电机机端两相金属性短路情况下差动电流和动作电流的比值。
此情况下,在(Iz,Id)平面上两相金属性短路的故障点应该在斜率为2的部故障特性线的上方,而一般动作边界的制动系数不会超过1,所以按照规程中整定出来的动作边界肯定能够满足灵敏度系数Klm≥2的要求。
而实际上,真正灵敏度的校验应该是在发电机中性点侧发生轻微相间故障的时候,差动电流和此时动作电流的比值,故长期以来用机端两相短路的情况来校验差动保护的灵敏度,是否合理,有待进一步讨论。
从物理概念上看,故障点与动作边界离得越远,该保护原理的灵敏度越高。
校验发电机差动保护灵敏度应该是在发电机发生各种部故障的情况下差动保护的反响能力,所以要解决的根本问题是发电机部发生短路故障时准确的理论分析,国已经有许多高校正在开展这方面的研究。
同时,灵敏度还与多种因素有关,如定值、原理和实现方法等。
2 具有制动特性的差动保护原理
-M9Q3t*F&f4[8O2.1 制动特性曲线原理
0m&K2Q0k F1t 制动特性曲线可以分为过原点和不过原点2种不同的原理,其中过原点的通用特性为:
0e ?
1]1`(J"u
式中:
Iq为启动电流;Ig为拐点是电流;Kz为制动系数。
;G+e9n1r&X 同时,由于Id和Iz的取法各有不同,差动保护的特性亦是有差异的,将目前常用的取值方法归纳如表1所示。
不同的原理可以得到不同特性,根据元件保护的要求可选择适合它们的不同的保护原理。
对差动保护而盲,即使采用一样的原理,但如果整定值不同,性能也有很大差异,以下针对这些问题展开分析。
/A!
G1e+[ ;D3g/|)T2.2 制动系数和斜率之间的转换关系
制动系数和曲线斜率是两个不同的物理概念,在传统保护中经常用到的制动系数Kz的概念定义为:
3e;j!
V+F#^:
^式中:
Iz'为动作电流整定值。
最大制动系数等于最大动作电流整定值和对应的制动电流之比。
因为制动曲线一般不过原点,所以制动系数和制动曲线的斜率Ks一般不相等,不要把两者混为一谈。
图1给出了制动系数和制动曲线斜率之间关系的几何说明。
7Y,e6e*h,w
(m8s4L'm%y#Z(K5K
-_-Y2Y'N1]7G)O 当区外发生最严重故障的时候,Kz取得最大值,将Iz=Iz,max代人式(6)就可以得到制动系数的最大值Kz,max。
3x&A!
`9;N/?
*T$W!
c 从上面可以看出,比率制动系数实际上是一个变数,它随制动电流的大小而变化,厂家给出的制动系数通常是指制动特性曲线上制动段的斜率而不是整定计算中的制动系数,实用制动特性曲线上的制动系数随制动电流的变化而改变。
$f9_ U7V;t5y 表2说明了最大比率制动系数和比率制动斜率之间的关系。
假定Iq=0.8A;Ig=5A;Iz,max=30A。
j7I*b%o z,O6w
)x i"W4['l$q&g5{1^ 从表中可看出,Kz,max和Ks的关系是一条不过原点的直线关系,实际工程中Ks一般大于Kz,max。
6i-o"k9-h'd'u2.3 制动曲线斜率与灵敏度的关系
过原点的比率制动特性和不过原点的比率制动特性如图2所示。
9I9N:
G%m'a1T7[:
x
过原点的动作边界认为不管电流互感器(TA)二次电流大于或小于额定电流,对应的误差都一样,不平衡电流随制动电流的变化根本上是线性的,所以对应的制动曲线是一条过原点的直线。
不过原点的制动曲线考虑到TA在它的额定电流以下误差很小,所以对应的不平衡电流就很小,可以认为是一个很小的常量;而在TA电流大于二次额定电流时,误差很大,对应的不平衡电流是非线性变化的,这样考虑更加符合实际情况。
在动作区域平面图上我们可以看出两者的区别。
过原点的比率制动特性动作区是在ADCE以上。
而不过原点的比率制动动作区为ABCE以上。
从几何上可明显看出,虽然过原点的制动曲线的斜率比不过原点的制动曲线的斜率小,但是过原点的比率制动原理却没有不过原点的比率制动原理灵敏。
因此,差动保护的灵敏度不仅与斜率有关,还与启动电流和拐点电流的大小的选取有密切的关系,不能一味地靠降低斜率来提高差动保护的灵敏度。
3 标积制动原理与比率制动原理之间的对应关系
3.1 标积制动原理和比率制动原理
为提高差动保护的灵敏度,提出了标积制动式微机差动保护原理,该原理的最大优点就是在不降,低差动保护可靠性的前提下,大提高了差动保护的灵敏度
。
目前采用的标积制动原理,一般将动作电流和制动电流变换到和比率制动原理一样的尺度下来判断,所以工程上现在用得最多的也是开平方式的标积制动原理,如表l所示。
比率制动原理和标积制动原理的区别在于制动电流和动作电流的取法不同,但它们在数学上是可以相互推导的。
下面根据该公式来探讨一下标积制动原理与比率制动原理之间的关系。
6Y6a;h ~+W${%G-w+ 设Id,Iz为比率制动原理的动作量和制动量,Idb,Izb为标积制动原理的动作量和制动量,有
4v1H1m8E#L)d0n0u5l
3F"k!
w;q7A(E)B-`*Z 从上面可以看出,标积制动量和动作量可以从比率制动的动作量和制动量获得。
从本质上看,差动保护原理可由两个局部组成,一局部是动作电流和制动电流的获取方法如表1所示;另一局部是动作边界确实定。
一样的差动电流和制动电流的取法,但动作边界不同,特性是不同的;同样的动作边界,假设差动电流和动作电流的取法不同,特性也是不同的。
图3为标积制动原理与比率制动原理之间的对应关系。
我们根据以上的取值方法来讨论标积制动原理与比率制动原理之间动作边界的映射关系。
首先讨论比率制动原理中的Id=KIz直线对应到标积制动原理中的直线的映射关系。
/r9D"})g/I"H
区故障时,机端电流和中性点电流的夹角围一般在[一90°,90°]区间,理想情况下夹角为0°,比率制动原理反响出的量Iz=0,为Id轴,斜率为正无穷大,差动保护可靠动作;如此时发电机没有接人系统,即IT=o,那么反响到比率制动平面上是斜率为2的故障特性曲线,保护也能够可靠动作,此时,标积制动原理计算出来的动作量和制动量在动作平面上是Id,轴。
即使考虑到区故障时相位差为90°,那么对应于比率制动原理来说,故障点为图4中K=2的直线OM,对应于标积制动原理,相应的动作量不变,制动量变为0,故障点水平映射为Id轴。
由此可见,标积制动原理将比率制动原理中的直线在部故障的时候向逆时针旋转了,即离开动作边界更远,所以保护在区故障的时候将更灵敏。
区外故障时,理想情况下,比率制动原理对应于Iz正轴,标积制动原理也是对应于Iz正轴,可见它不影响区外故障的可靠性。
5f3Q.N#o)v)F.m,]$S%b 一般情况下,发电机在部故障时,比率制动原理动作点落在动作区,而外部故障时保护落在制'J#t!
A)E-J I2t0z9~
7X z1B:
Z*Z6w9|动区,也就是落在TA的误差曲线以下。
但也有这种情况出现,即在部故障时,发电机还具有穿越性电流,动作点落在过渡动作区,此时,标积制动原理能够将动作点往逆时针旋转,离开动作边界较比率制动更远,所以具有更高的灵敏度:
在区外故障时,由于TA变比误差,TA饱和暂态过程中有衰减的直流分量等原因,动作点可能向保护过渡动作区域移动,使保护在区外故障时误动。
标积制动原理将比率制动原理中Id=KIz直线逆时针旋转了一个角度,所以如要取得和比率制动一样的特性,相应的动作边界也要抬高一点。
3.2 比率制动斜率与标积制动斜率之间的数值对应关系
9H6h5g!
G2X;q2~(P.U
j7r2y7F"}变化。
下面推导比率制动系数和标积制动系数之间的关系,它只适用于动作边界过原点的情况。
在此情况下比率制动和标积制动原理可以相互推导等效。
如果动作边界是一条不过原点的直线,要用标积制动原理来实现和比率制动原理一样的特性,那么相应地在标积制动空间中,动作边界就不能再为一条直线。
图5反映了这种区别。
"o8b*`$W5x9e%_;c
$Q:
^#{.M+N'T.{7P 图5右面的直线反映的是比率制动原理中的一个动作边界,要实现同样的特性,那么标积制动的动作边界就是一条曲线。
因为一般工程上制动系数很小,这时映射的曲线近似为一条直线,所以工程上用上述方法来近似是可以承受的。
标积制动原理提高了区短路的灵敏度,如果把整定值对应起来,同样对区外故障的可靠性也不会有影响。
.O/r-I9e1K4 制动特性曲线原理(各种抗饱和措施)
采用一条制动直线来实现差动保护,虽然相对说来整定比拟容易,由于二次侧的误差电流从本质上看是非线性的,即随着外部短路电流的增加而增加,所以实际上制动曲线也应该取成非线性曲线,但是实现起来比拟困难,因此工程上通常采用分段折线的制动曲线来完成保护原理。
这样可以提高差动保护的可靠性和灵敏性,如图6所示。
随着电力系统的开展,短路容量增大,同时相应的短路时间常数也增大,使得在外部短路过程中TA容易饱和,导致差动保护误动,所以国外采用了不同的手段来检测TA饱和。
西门子公司的差动保护采用的抗饱和措施是增加了一个附加制动区,采用饱和检测器检测TA饱和,作为一个附加的制动措施。
饱和检测器是动态运行的,它在故障发生后的半个周期做出决定。
在外部故障时TA饱和使制动电流初始值很大,移动到附加制动区域,而在区故障时运行点沿着故障特性曲线移动。
当检测到外部故障时,差动保护在一个选定的时间闭锁(8个周期),只要运行点沿着故障特性曲线移动(2个周期),这种闭锁就可解除。
用这种方法可以防止外部故障TA饱和的情况下差动保护误动。
5 Y/△变压器差动保护TA全Y接入的启动电流和拐点电流的合理性
以有名值整定时,应以软件电流的归算侧作为整定依据:
假设归算侧为主变压器的Y侧TA,那么在算出的定值根底上应乘以3(1/2)。
原因是:
从软件方面看,为了校正Y/△带来的相位和幅值差,本来由TA接线来完成的校正交给了软件来完成(但有的保护可能在整定时已考虑了3(1/2)的因素,这将会引起混乱,最直接的方法是用实验来验证)。
%v,_*~6w'}(c 实验验证方法如下:
①Y/△变压器Y侧TA上加单相电流,此时动作值应为3(1/2)倍的定值,②在ABC三一样时加对称电流时,达定值时动作。
6 发电机裂相横差保护启动电流和拐点电流的合理性
8L6k(s:
P9H/e:
O&l 发电机裂相横差保护整定相比照拟复杂,它和所使用的一次TA变比、分支的组合方式都有关系,尤其当两个臂的分支数不相等时更加复杂。
如果发电机分支组合后差动臂的2个TA的变比不一致,将导致误差的增加,所以裂相横差保护的启动电流应该比完全差动保护的启动电流大。
发电机裂相横差保护整定可参考发电机差动保护的整定原那么整定,但是要充分考虑到所用的一次TA变比对定值产生的影响。
整定考虑的原那么是:
当区外发生严重故障时,TA在允许围的误差不应该误动。
-~9o$L!
t+c*y&B!
R7 结论
本文对发电机差动保护中长期存在的许多值得探讨的问题进展了详细的分析。
通过分析制动曲线的含义,得出通过原点的制动曲线才是制动系数,不经过原点的制动曲线在工程中实质上是指曲线的斜率,而曲线的斜率和制动系数之间有相应的转换关系,不能互相替代;不同的原理其实包含灵敏度的差异,不能一味地降低保护的定值来提高保护的灵敏度,选择适宜的保护原理对提高保护的灵敏度具有重要的作用;标积制动原理和比率制动原理的差动保护,灵敏度也是不同的,但是它们之间又有联系;TA的误差是发电机差动不平衡电流的惟一来源,因此理论上,启动电流和拐点电流主要和TA的特性有关。
本文还讨论了Y/△变压器差动保护TA全Y接入的启动电流和拐点电流的合理性,以及发电机裂相横差保护启动电流和拐点电流的合理性,并尽可能在详细分析的根底上给出相应的结论。
 升级会员
升级会员 