摄影测量实验报告.docx
《摄影测量实验报告.docx》由会员分享,可在线阅读,更多相关《摄影测量实验报告.docx(22页珍藏版)》请在冰豆网上搜索。
摄影测量实验报告
实验报告
实验课程及编号:
622030实验教师:
牛雪峰实验员:
实验项目及编号:
数字影像匹配及数字微分纠正62203003
报告人
姓名:
孙志强
学号:
62150711
时 间
2017年12月29日
地点:
地质宫137
实验软件
VirtuoZoNT系统
硬件设备
PC
实验数据或材料
原始影像01-156_50mic.tif和01-157_50mic.tif、hamer.gxyz、rc30.cmr文件
一、
实验目的与原理
通过本次实习,了解VirtuoZoNT系统的运行环境以及该软件各个模块的操作,了解实习的工作流程。
从而对数字摄影测量实习有个整体概念。
1、了解VirtuoZoNT系统
VirtuoZoNT系统是利用数字影像或数字化影像完成摄影测量作业,由计算机视觉代替人眼的立体量测与识别。
可以进行影像匹配、核线采样、生成数字高程模型、制作正射影像、生成等高线、图廓整饰等工作。
2、了解系统目录
二、实验方法与步骤
1、建立测区
首先在D盘中建立一个自己的文件夹;打开软件新建一个测区:
点击文件-打开测区。
在查找范围中选择刚才建立好的文件夹,在文件名中输入测区名字。
然后单击打开按钮即可。
系统弹出设置测区对话框。
设置测区参数:
路径设置:
主目录:
选择D盘中你的文件夹
以下三个文件需要手动输入
控制点文件:
(你的文件夹名字).ctl
加密点文件:
(你的文件夹名字).ctl
相机检校文件:
(你的文件夹名字).cmr
其他默认即可。
测区目录和文件这一栏中的主目录路径是要将您的测区放在哪个磁盘,控制点文件、加密点文件和相机检校文件应放在测区文件夹中。
2、引入影像
在主菜单上单击文件→引入→影像文件菜单项:
系统弹出输入影像对话框:
将像素大小改为0.1,用鼠标左键单击增加按钮,找到存放原始TIFF影像的文件夹并将其打开。
选择好待转换的原始影像01-156_50mic.tif和01-157_50mic.tif以后,用鼠标左键单击打开按钮,您所选择原始TIF影像被列入到输入影像对话框中,用鼠标左键单击该对话框中的处理按钮,程序会自动将原始的TIFF影像转换为适合VirtuoZo处理的VZ影像,处理完影像后直接点退出按钮。
如下图所示:
数据前方显示红色对号表示处理完成,点击退出即可。
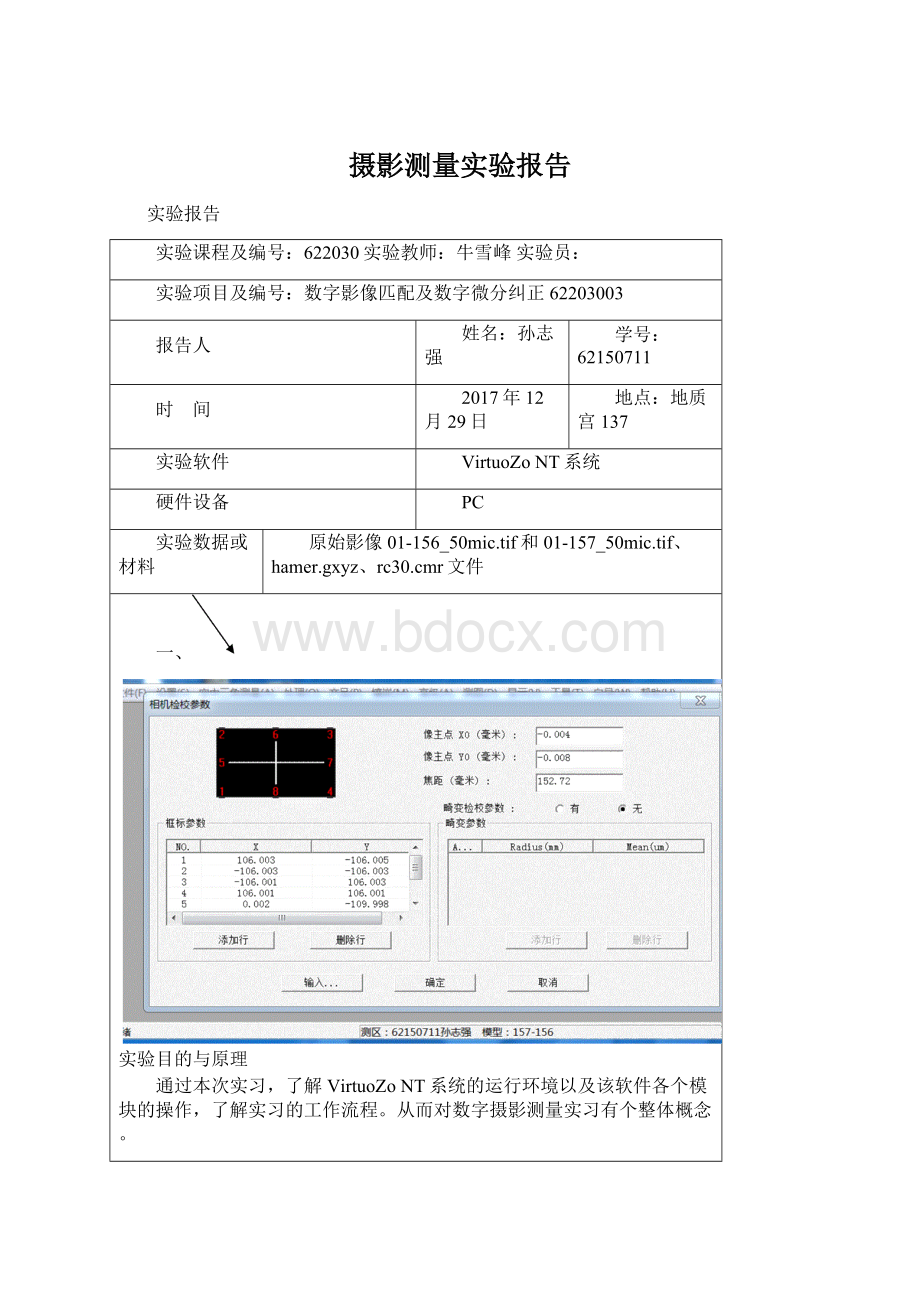
3、设置测区中的相机参数
选择设置菜单中的相机参数,选中rc30.cmr相机文件,之后点击修改参数。
4、引入地面控制点
选择设置菜单中的地面控制点,系统会弹出下面对话框:
用鼠标左键单击输入按钮,在弹出的对话框中的文件类型改为‘所有文件’,在原始数据文件夹中找到并且单击hamer.gxyz,之后点击打开。
之后单击确定。
5、新建模型
用鼠标左键单击文件菜单下的打开模型菜单项,输入一个文件名‘157-156’。
系统会自动保存该文件名。
然后点打开按钮,系统弹出设置模型参数对话框:
左影像选择01-157_50mic.vz,右影像选择01-156_50mic.vz。
其他参数默认即可。
点击保存。
6、定向处理
6.1内定向
选择菜单处理→模型定向→内定向。
设置框标模板
框标被小白框围住,如果小白框没有围住框标,单击框标,小白框将自动围住框标。
然后单击接受按钮,完成框标定位,进入像片内定向。
每个方块按钮对应于一个框标。
单击其中一个按钮,则右边微调窗口中将放大显示其对应的框标影像。
为了使内定向的精度满足作业要求,尽量使白色的十字丝对准框标的中心。
具体操作是通过方块按钮选择第一个框标,然后利用右边窗口中的按钮:
进行调整,直到框标放大影像中的白色十字丝对准相机的框标中心。
然后选择保存退出,左影像内定向完成。
然后在进行右影像内定向。
步骤相同。
6.2相对定向
选择菜单处理→模型定向→相对定向,进入相对定向界面。
单击鼠标右键系统会弹出:
选择自动相对定向,该软件将自动进行相对定向,寻找左右影像上合适的同名点,然后用红色“+”显示在影像上。
如下图所示:
继续单击右键选择‘全局显示’,继续单击右键选择‘自动定义最大作业区’。
6.3绝对定向
在进行绝对定向是我们要先量侧控制点。
根据给出的控制点点位图在图上找到对应的控制点。
具体操作如下:
选择菜单处理→模型定向→相对定向,进入相对定向界面。
在相对定向的界面中的左影像上,大概找到某一控制点的位置,找到后在点位附近点击,系统将弹出一放大的影像的小窗口,在该小窗口中,单击鼠标左键,程序将自动匹配出右影像上的同名点,同时有一个调整点位的对话框出现。
如下图所示:
对控制点的点位进行调整,直到红色十字丝对准控制点时为止,同时输入控制点相应的点号,点击确定保存。
添加完所有的控制点后,就可以进行绝对定向了。
绝对定向分为普通方式的绝对定向和立体方式的绝对定向。
普通方式的绝对定向
普通方式的具体操作是在模型的相对定向的界面下单击鼠标右键,在系统弹出的菜单中,用鼠标左键选择绝对定向子菜单中的普通方式,系统弹出调整控制点对话框,绝对定向的结果显示在右边的定向结果一栏中,如下图所示:
如果解算出的控制点的大地坐标值的误差过大时,可以通过调整控制点对话框中的调节按钮对每个控制点进行调节,分别对控制点的点位在X、Y、Z方向上移动。
按一下按钮,表示步距在原来的基础上增加10倍,按一下按钮,表示步距缩小到原来的1/10。
定向完成后,点击调整窗口的确定,点击右键,在弹出的菜单中选择保存,然后退出相对定向。
7、生成核线
点击主菜单上处理-核线重采样,系统自动进行核线重采样。
8、影像匹配
生成核线影像后,即可进行影像匹配,选择菜单处理→影像匹配,系统将自动进行影像匹配。
9、DEM生成
在完成模型的影像匹配和匹配结果的编辑之后,就可以生成数字高程模型DEM。
选择系统菜单产品→生成DEM→DEM(M),系统将开始自动生成DEM。
首先是生成DTM,然后是DEM。
10、正射影像的生成、显示
1、正射影像的生成
用鼠标左键单击产品菜单下的生成正射影像菜单项,程序将会自动生成当前模型的正射影像。
2、正射影像的显示
在VirtuoZo主界面中,选择显示菜单下的正射影像菜单项,即可看到当前模型的正射影像了。
三、实验结果(可单独附页)
正射影像:
等高线生成:
四、实验结果分析
VirtuoZo质量报告
内定向信息:
(D:
\62150711孙志强\157-156)
------------------------------------------------------------------
左原始影像(D:
\62150711孙志强\Images\01-157_50mic.vz):
起点坐标[行数X列数]:
1151.2301151.439
[x0Xy0]:
0.0000.000
RMS:
Mx=0.023My=0.007
残差:
点号dxdy
10.017-0.005
20.0170.008
3-0.0010.006
40.039-0.005
5-0.0190.000
60.003-0.014
7-0.0220.002
8-0.0340.009
右原始影像(D:
\62150711孙志强\Images\01-156_50mic.vz):
起点坐标[行数X列数]:
1138.0651152.902
[x0Xy0]:
0.0000.000
RMS:
Mx=0.018My=0.007
残差:
点号dxdy
10.015-0.004
20.016-0.004
3-0.017-0.005
40.0210.009
5-0.0180.003
60.0050.012
70.008-0.009
8-0.030-0.002
------------------------------------------------------------------
相对定向信息:
(D:
\62150711孙志强\157-156)
------------------------------------------------------------------
相对定向信息:
左旋转矩阵:
0.999944980.01048300-0.00030500
-0.010483000.99994498-0.00000000
0.000305000.000003001.00000000
右旋转矩阵:
0.999937000.00556500-0.00976900
-0.005558000.999984030.00075500
0.00977300-0.000700000.99995202
右片旋转角(rad):
Phi=0.00030500
Omiga=0.00000000
Kappa=-0.01048300
左片旋转角(rad):
Phi=0.00976900
Omiga=-0.00075500
Kappa=-0.00555800
残差:
点号dq
1-0.000000
2-0.021000
3-0.025000
40.019000
5-0.006000
60.018000
7-0.020000
80.003000
9-0.004000
10-0.018000
110.001000
120.014000
130.002000
140.015000
15-0.004000
160.013000
17-0.006000
180.017000
19-0.000000
200.004000
210.002000
220.017000
230.010000
24-0.020000
25-0.015000
260.019000
27-0.014000
28-0.014000
290.004000
30-0.012000
31-0.018000
320.001000
33-0.025000
34-0.009000
35-0.011000
36-0.026000
370.023000
38-0.013000
390.010000
40-0.006000
41-0.009000
42-0.024000
430.018000
44-0.001000
450.008000
46-0.024000
470.019000
480.010000
49-0.004000
500.016000
51-0.004000
520.008000
530.008000
54-0.000000
550.011000
56-0.011000
570.011000
58-0.004000
59-0.007000
60-0.001000
610.016000
62-0.008000
63-0.008000
64-0.005000
650.023000
66-0.005000
67-0.007000
680.007000
69-0.005000
700.017000
710.015000
72-0.002000
73-0.010000
740.022000
75-0.016000
76-0.003000
770.016000
780.021000
790.017000
80-0.012000
810.010000
820.005000
83-0.016000
840.000000
850.006000
86-0.002000
87-0.013000
88-0.012000
89-0.002000
900.003000
91-0.003000
92-0.021000
93-0.012000
940.001000
95-0.011000
960.008000
970.004000
98-0.006000
99-0.007000
100-0.017000
101-0.009000
102-0.000000
1030.016000
1040.000000
1050.017000
106-0.000000
107-0.008000
1080.015000
1090.003000
1100.017000
111-0.014000
112-0.008000
113-0.013000
1140.014000
1150.003000
1160.013000
117-0.017000
118-0.020000
119-0.018000
120-0.026000
121-0.025000
122-0.001000
1230.006000
1240.017000
125-0.008000
1260.016000
127-0.017000
128-0.009000
129-0.015000
130-0.017000
131-0.004000
1320.013000
1330.023000
134-0.001000
135-0.015000
136-0.017000
1370.016000
1380.009000
1390.001000
140-0.005000
1410.008000
1420.016000
143-0.015000
1440.002000
145-0.006000
146-0.006000
1470.001000
1480.021000
1490.013000
1500.006000
151-0.022000
152-0.019000
1530.012000
154-0.018000
155-0.021000
1560.003000
157-0.005000
158-0.003000
1590.006000
160-0.004000
1610.011000
162-0.008000
1630.009000
1640.009000
165-0.019000
1660.010000
167-0.003000
1680.004000
1157-0.018000
2157-0.013000
11560.049000
2156-0.069000
61560.243000
61570.005000
RMS:
Mq=0.024000
------------------------------------------------------------------
绝对定向信息:
(D:
\62150711孙志强\157-156)
------------------------------------------------------------------
绝对定向信息:
左旋转矩阵:
0.999868210.015638430.00435189
-0.015657550.999867740.00439340
-0.00428261-0.004460960.99998087
右旋转矩阵:
0.999929490.01071781-0.00510868
-0.010691260.999929370.00519690
0.00516402-0.005141920.99997348
左片摄站坐标:
Xs=13543.745Ys=11548.106Zs=3240.931
右片摄站坐标:
Xs=14908.416Ys=11541.042Zs=3234.608
残差:
11570.2256180.7424360.447442
21570.055095-0.5412640.901132
11560.493340-0.691838-0.824418
21560.477171-0.463634-0.866116
6156-0.3003162.5459751.592228
6157-0.950909-1.591676-1.250269
RMS:
mx=0.503228my=1.326223
mxy=1.418487mz=1.044065
------------------------------------------------------------------
影像匹配信息:
(D:
\62150711孙志强\157-156)
------------------------------------------------------------------
__________________Initialparameters______________________
leftimage:
rows=2049columns=1163
rightimage:
rows=2049columns=1163
Matchwindowwidth=7
Matchwindowlength=7
Searchingrange=1
MatchgridX_interval=7
MatchgridY_interval=7
__________________________________________________________
__________________________________________________________
MATCH_BLOCK==1
MATCH_LEVEL==3
MATCH_AREAS==15X8
____________________________________________________________
120:
00.0%
120:
7260.0%
120:
10486.7%
120:
11797.5%
120:
11797.5%
120:
11797.5%
120:
11797.5%
__________________________________________________________
MATCH_BLOCK==1
MATCH_LEVEL==2
MATCH_AREAS==45X25
____________________________________________________________
1125:
00.0%
1125:
91181.0%
1125:
101790.4%
1125:
106094.2%
1125:
106794.8%
1125:
106894.9%
1125:
107195.2%
__________________________________________________________
MATCH_BLOCK==1
MATCH_LEVEL==1
MATCH_AREAS==136X77
____________________________________________________________
10472:
00.0%
10472:
835979.8%
10472:
923088.1%
10472:
949390.7%
10472:
962191.9%
10472:
968492.5%
10472:
973593.0%
10472:
976293.2%
10472:
979693.5%
10472:
981493.7%
10472:
983293.9%
10472:
984394.0%
10472:
985394.1%
10472:
986594.2%
10472:
987594.3%
10472:
988394.4%
10472:
989294.5%
10472:
989594.5%
__________________________________________________________
MATCH_BLOCK==1
MATCH_LEVEL==0
MATCH_AREAS==292X166
____________________________________________________________
48472:
00.0%
48472:
3669475.7%
48472:
4051783.6%
48472:
4179986.2%
48472:
4263288.0%
48472:
4310588.9%
48472:
4346789.7%
48472:
4374790.3%
48472:
4401490.8%
48472:
4418791.2%
48472:
4434991.5%
 升级会员
升级会员 