自动控制原理matlabsimulink自控实验作业范云飞.docx
《自动控制原理matlabsimulink自控实验作业范云飞.docx》由会员分享,可在线阅读,更多相关《自动控制原理matlabsimulink自控实验作业范云飞.docx(8页珍藏版)》请在冰豆网上搜索。
自动控制原理matlabsimulink自控实验作业范云飞
实验概述:
【实验目的及要求】
立、
立、
本部分的目的在于学习matlab中有关simulink的正确使用及其应用,包括:
simulink的基本使用、模型的建立、模型的复制剪切粘贴、命名等、线的基本使用、子系统的建立、属性的设置、参数的设置与应用、simulink仿真运行参数的
设置等。
通过该实验,要求能够做到不查参考书,能熟练编写基本的simulink应用。
实验内容:
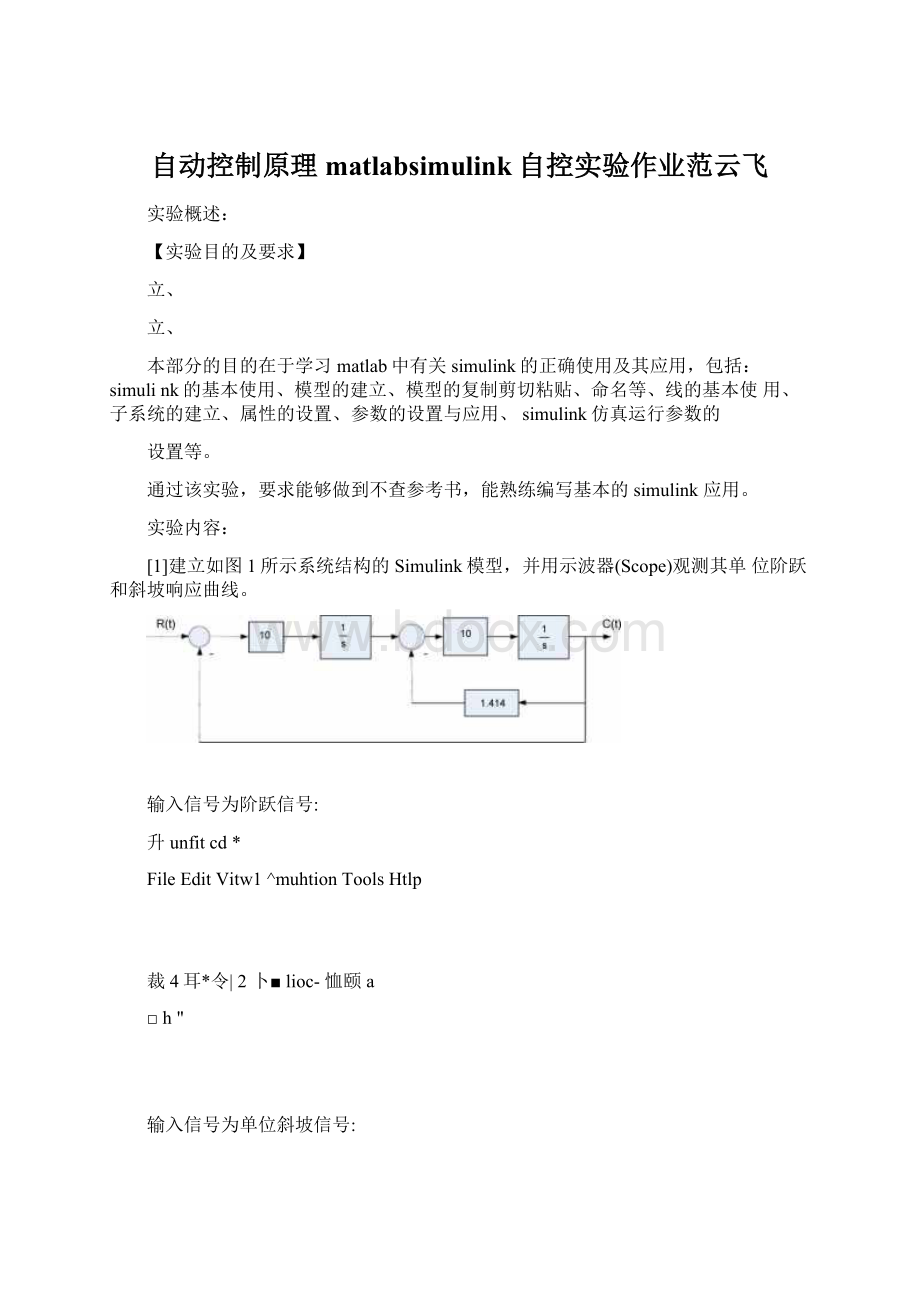
[1]建立如图1所示系统结构的Simulink模型,并用示波器(Scope)观测其单位阶跃和斜坡响应曲线。
输入信号为阶跃信号:
升unfitcd*
FileEditVitw1^muhtionToolsHtlp
裁4耳*令|2卜■lioc-恤颐a
□h"
输入信号为单位斜坡信号:
100
80
GO
4lj
20
Timeoffset:
[2]建立如图2所示PID控制系统的Simulink模型,对系统进行单位阶跃响应仿真,用plot函数绘制出响应曲线。
其中kp=10,ki=3,kd=2。
要
求PID部分用subsystem实现,参数kp、ki、kd通过subsystem参数输入来实现。
图2
■whhh*
^0[Hdrrnal
'Scope'parameters—X
plot(aa(:
1),aa(:
2))
FileEditViewSirrjlationFormatToolsHelpne巳皆|鳥奎定|q申令|aa|
■」』■
FibEdkVirsvSimd^anFormatTeals氐Ip
-口
uWl吕K為戸眷f丄1・・個
[Ho^rrkl
£固元*
[4]图4所示为弹簧一质量一阻尼器机械位移系统。
请建立此动态系统的Simulink仿真模型,然后分析系统在外力F(t)作用下的系统响应(即质量块的位移y(t))。
其中质量块质量m=5kg,阻尼器的阻尼系数f=0.5,弹簧的弹性系数K二5;并且质量块的初始位移与初始速度均为0。
说明:
外力F(t)由用户自己定义,目的是使用户对系统在不同作用下的性能有更多的了解。
图4弹簧-质量-阻尼器机械位移系统示意图
提示:
(1)首先根据牛顿运动定律建立系统的动态方程,如下式所示:
(2)由于质量块的位移yt未知,故在建立系统模型时.使用积分模块Integrator
对位移的微分进行积分以获得位移yt,且积分器初估值均为0
为建立系统模型.将系统动态方程转化为如下的形式:
然后以此式为核心建立系统模型。
得到阶跃、速度、加速度、正弦四种信号作用下的示波器显示结果输出。
拉氏变换后:
1fk
s2Y(s)—F(s)—sY(s)—Y(s)mmm
Y(s)11
F(s)ms2fsk5s20.5s5
输入信号为阶跃信号:
二亡玉-eQ.*—LIX
Fi-mEdrt-'BBSDQO^^SD一介^=>-b&-▼■SI・着匕丄
Rmady100%dde45
!
I>a4nRs;岡a4n
Wuntitled*
Help
-□
X
FileEdit
View
SimulatioriFormal
Tools
1^|
M电良|4冲令|a
O|
卜|100Normd
jd
y
1
凸^代辰亠5
1
>—
1;i
1
Rsmp
TransferFen
Scop-e
Ready
icm)一
~l~
ode45
输入信号为加速度信
i=r.
号:
Wuntrtled*—口
FileEditViewSimulationFormatToolsHelp
【小结】
初步学会了如何用simulink进行系统响应的仿真,遇到不会的地方通过查书和上网搜索基本明白,对课本上学到的东西理解更加深刻。
正确的建立模型很重要。
说明:
1、将每一道题的程序、建立的模型放置在该题目下方;
2、小结部分为对本次实验的心得体会、思考和建议。
 升级会员
升级会员 