简易避障小车设计DOC.docx
《简易避障小车设计DOC.docx》由会员分享,可在线阅读,更多相关《简易避障小车设计DOC.docx(10页珍藏版)》请在冰豆网上搜索。
简易避障小车设计DOC
简易避障小车设计
1.设计背景
随着汽车的自动化、智能化程度的提高,新一代智能汽车的研发在国内外受到越来越多的重视。
目前,国内比较先进的智能车通过观测前方的路况,将路面的信息输入到车内的电脑中,通过计算机控制方向盘的运动,实现自动避障[1]。
智能车辆的速度,关键在于它的控制技术,这就涉及到它的避障算法。
一个好的控制算法如同一个有经验的司机,控制汽车运行[2]。
自第一台工业机器人诞生以来,智能小车的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
近年来智能小车的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
借此在上单片机课的这次机会,我们三个共同想要自己研究制造一辆避障小车。
2.总体概述
2.1系统功能
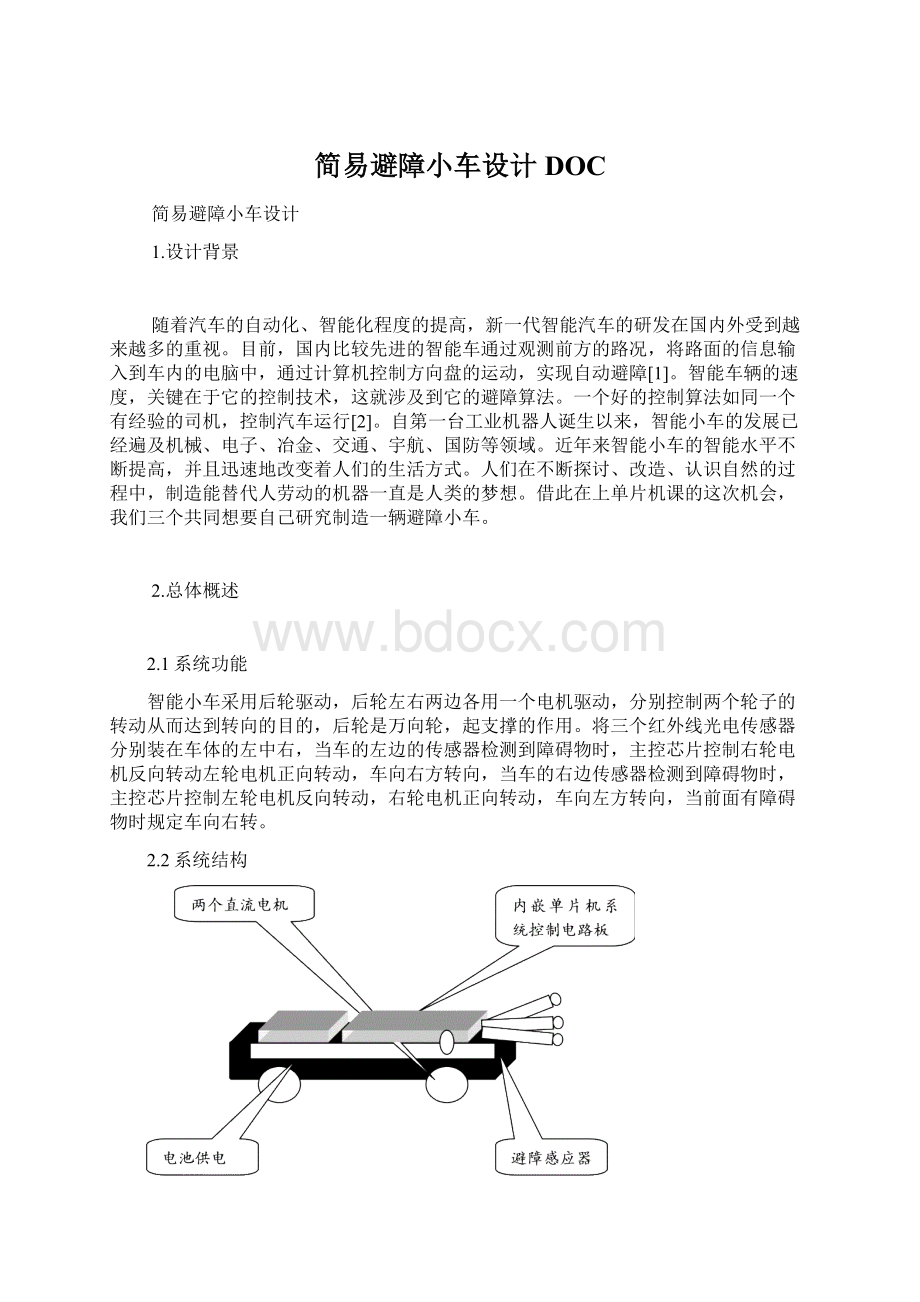
智能小车采用后轮驱动,后轮左右两边各用一个电机驱动,分别控制两个轮子的转动从而达到转向的目的,后轮是万向轮,起支撑的作用。
将三个红外线光电传感器分别装在车体的左中右,当车的左边的传感器检测到障碍物时,主控芯片控制右轮电机反向转动左轮电机正向转动,车向右方转向,当车的右边传感器检测到障碍物时,主控芯片控制左轮电机反向转动,右轮电机正向转动,车向左方转向,当前面有障碍物时规定车向右转。
2.2系统结构
智能避障小车的结构
2.3系统原理
本设计用单片机来处理传感器采集来的数据,通过光电开光传感器判断小车前面的障碍物接受信号,处理完毕之后以便去控制电机驱动电路来驱动电机。
电源部分为整个电路模块提供电源,以便能正常工作。
2.4控制框图
2.5系统模块
2.5.1障碍物探测模块
使用三只E3F-DS30C4光电开关,分别探测正前方,前右侧,前左侧障碍物信息,在特殊地形(如障碍物密集地形)可将正前方的光电开关移置后方进行探测。
E3F-DS30C4光电开关平均有效探测距离0-30cm可调,且抗外界背景光干扰能力强,可在日光下正常工作(理论上应避免日光和强光源的直接照射)。
小车换档调速后的最大制动距离不超过30cm,一般在10-20cm左右。
2.5.2电机驱动模块
使用全桥驱动芯片L298N芯片驱动电机,L298N是一个具有高电压大电流的全桥驱动芯片,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号,而且带有使能端,方便PWM调速,电路简单,性能稳定,使用比较方便。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,正好符合小车两个二相电机的驱动要求。
2.5.3电源模块
采用6V干电池通过7805转换为5V电压向单片机和光电开光供电,在稳压方面,起始时考虑使用7805芯片对6V的电池电压进行降压稳压。
故
使用干电池对系统供电,小车模型作为小车底座,采用单片机作为主控芯片,采用E3F-DS30C4光电开关进行障碍物探测,使用L298N驱动直流电机。
3.硬件电路
本次设计是以单片机来控制小车实现启停和检测前面的障碍物并且能够实现简单的避障。
本系统硬件由单片机系统控制电路、障碍检测电路、电机驱动电路和显示电路模块。
本设计通过小车这个载体再结合由单片机为核心的控制板可以达到其基本功能,能够利用红外线光电传感器感应到前面的障碍物,再通过控制电路使小车可以进行向右向左转弯,再辅加由红外线光电传感器组成的避障电路、电源电路、差分驱动电路就可以完善整个设计。
利用红外技术检测障碍物信息,采用单片机进行实时控制,实现智能避障,智能小车采用后轮驱动,两轮各用一个直流电机控制,避障用的传感器采用光电开光传感器。
电路框图
3.1硬件的最小系统设计模块
单片机在系统中起到控制中心的作用,负责检测传感器的状态并向电机驱动电路发出动作命令。
采用手动复位。
用单片机构成最小应用系统时,只要将单片机接上时钟电路和复位电路即可。
由于集成度的限制,最小应用系统只能用作一些小型的控制单元。
单片机的P1口通用口用来接收红外传感器的信号,P1.0到P1.3口分别来接收三个光电开关的输入信号,P2通用口用来驱动电机,P2.0到P2.6用来控制L298N的输入口。
最小系统电路图如图:
最小系统电路图
3.1.1时钟电路
单片机虽然有内部振荡电路,但要形成时钟,必须外部附加电路。
单片机产生时钟有两种方法。
内部时钟方式和外部时钟方式。
本设计采用内部时钟方式,利用芯片内部的振荡电路,在XTAL1、XTAL2引脚上外接定时元件,内部的振荡电路便产生自激振荡。
本设计采用最常用的内部时钟方式,用外接晶体和电容组成的并联谐振回路。
振荡晶体可在1.2MHZ到12MHZ之间选择。
电容值无严格要求,但电容取值对振荡频率输出的稳定性、大小、振荡电路起振速度有少许影响,CX1、CX2可在20PF到100PF之间取值,但在60PF到70PF时振荡器有较高的频率稳定性。
所以本设计中,振荡晶体选择12MHZ,电容选择20PF。
时钟电路图如图所示:
时钟电路
3.1.2复位电路
infineonXC2000的复位是由外部的复位电路来实现的。
复位引脚RST通过一个斯密特触发器来抑制噪声。
复位电路通常采用上电自动复位和按钮复位两种方式。
上电自动复位是通过外部复位电路的电容充电来实现的。
只要Vcc的上升时间不超过1ms,就可以自动实现自动上电复位。
时钟频率用11.0592MHZ时C取10μF,R取1KΩ。
除了上电复位外,有时还需要按键手动复位。
本设计就是用的按键手动复位。
按键手动复位有电平方式和脉冲方式两种。
其中电平复位是通过RST端经电阻与电源Vcc接通而实现的。
复位电路图如图所示:
复位电路
3.2避障电路
避障电路采用漫反射式光电开关进行避障。
光电开关是集发射头和接收头于一体的检测开关,其工作原理是根据发射头发出的光束,被障碍物反射,接收头据此做出判断是否有障碍物。
单片机根据接收头电平的高低做出相应控制,避免小车碰到障碍物,由于接收管输出TTL电平,有利于单片机对信号的处理。
小车避障的原理:
小车车头处装有三个光电开关,中间一个光电开关对向正前方,两侧的光电开关向两边各分开30度。
小车在行进过程中由光电开关向前方发射出红外线,当红外线遇到障碍物时发生漫反射,反射光被光电开关接收。
小车根据三个光电开关接受信号的情况来判断相应的动作。
光电开关的平均探测距离为30cm。
光电开关工作原理:
光电开关是通过把光强度的变化转换成电信号的变化来实现控制的。
光电开关在一般情况下,有三部分构成,它们分为:
发送器、接收器和检测电路。
避障功能表见表1-1:
表1-1避障功能表
传感器
避障电路输出(上升沿动作)
待执行命令
右
中
左
左转信号
(P3.1)
右转信
号(P3.0)
0
0
0
√
左转
0
0
1
√
左转
0
1
0
√
不存在
0
1
1
√
左转
1
0
0
√
右转
1
0
1
√
左转
1
1
0
√
右转
1
1
1
前进
注(“0”表示有障碍物;“1”表示无障碍物)
3.3电源模块设计
电源模块的作用把6V锌锰干电池通过7805转换为5V,供单片机和光电开关使用。
电池对驱动电机供电。
本系统所有芯片都需要+5V的工作电压,而干电池只能提供的电压为1.5V的倍数的电压,并且随着使用时间的延长,其电压会逐渐下降,则需要LM7805稳压芯片。
L7805能提供300至500mA的电流,足以满足芯片供电的要求。
虽然微处理器和微控制器不需要支持电路,功耗也很低,但必须要加以考虑。
可以满足需要。
电源模块电路图如图2-5:
图2-5电源模块电路图
3.3电机驱动模块设计
电机驱动模块主要功能是将主控芯片发出的信号通过L298N电机控制芯片转化为小车实际的动作。
L298N芯片有两个电源引脚VDD引脚和VCC引脚。
VDD引脚接+9V电源用来给电机供电,VCC引脚接+5V电源用来给芯片供电,并作为逻辑高电平标准。
L298N芯片通过一个有四个IN4148二极管组成的保护电路与电机相连,保护电路主要是用来在电机开启和关闭时防止被反向击穿。
由于一直让转向电机以最大功率使能从而获得最大的扭矩,保证小车转向成功,而不需要控制转向电机的输出功率,所以ENA引脚(即转向电机使能引脚)直接接+5V,即让转向电机一直使能。
对于后置的驱动电机,不仅要控制其实现前进、后退和停止,还要能够控制其转速以解决由于电量不足而产生的小车变慢的问题[15]。
所以,将L298N芯片的ENB引脚与STC89C51的P2.1,用来实现PWM调速。
L298N芯片的IN1和IN2引脚分别和STC89C51的P2.4和P2.5引脚连接用来接收主控芯片输出的转向电机的动作指令,并通过OUT1和OUT2来控制转向电机的正转与反转,最终功能的实现表现在小车的左转与右转。
L298N芯片的IN3和IN4引脚分别与STC89C51的P2.2和P2.0引脚连接用来接收主控芯片输出的驱动电机的动作指令,并通过OUT3和OUT4来控制驱动电机的正转与反转,最终功能的实现表现在小车的前进、后退、停止。
采用与门对两电机进行选择控制,从而实现前进、左转、右转。
驱动电路原路框图如图2-6:
图2-6驱动电路原理图
驱动电路图如图2-7:
图2-7电机驱动模块电路图
可参考下图表:
电机
旋转方式
控制端IN1
控制端IN2
控制端IN3
控制端IN4
输入PWM信号改变脉宽可调速
调速端A
调速端B
M1
正转
高
低
/
/
高
/
反转
低
高
/
/
高
/
停止
低
低
/
/
高
/
M2
正转
/
/
高
低
/
高
反转
/
/
低
高
/
高
停止
低
低
/
/
/
高
3.4单片机控制电路模块
 升级会员
升级会员 