船舶电站教案.docx
《船舶电站教案.docx》由会员分享,可在线阅读,更多相关《船舶电站教案.docx(15页珍藏版)》请在冰豆网上搜索。
船舶电站教案
第一章船舶电站综述
本章重点:
①船舶电力系统的基本组成
②船舶电站自动化基本内容
③运行工况分析
难点:
理解运行工况分析
1-1船舶电力系统
一、
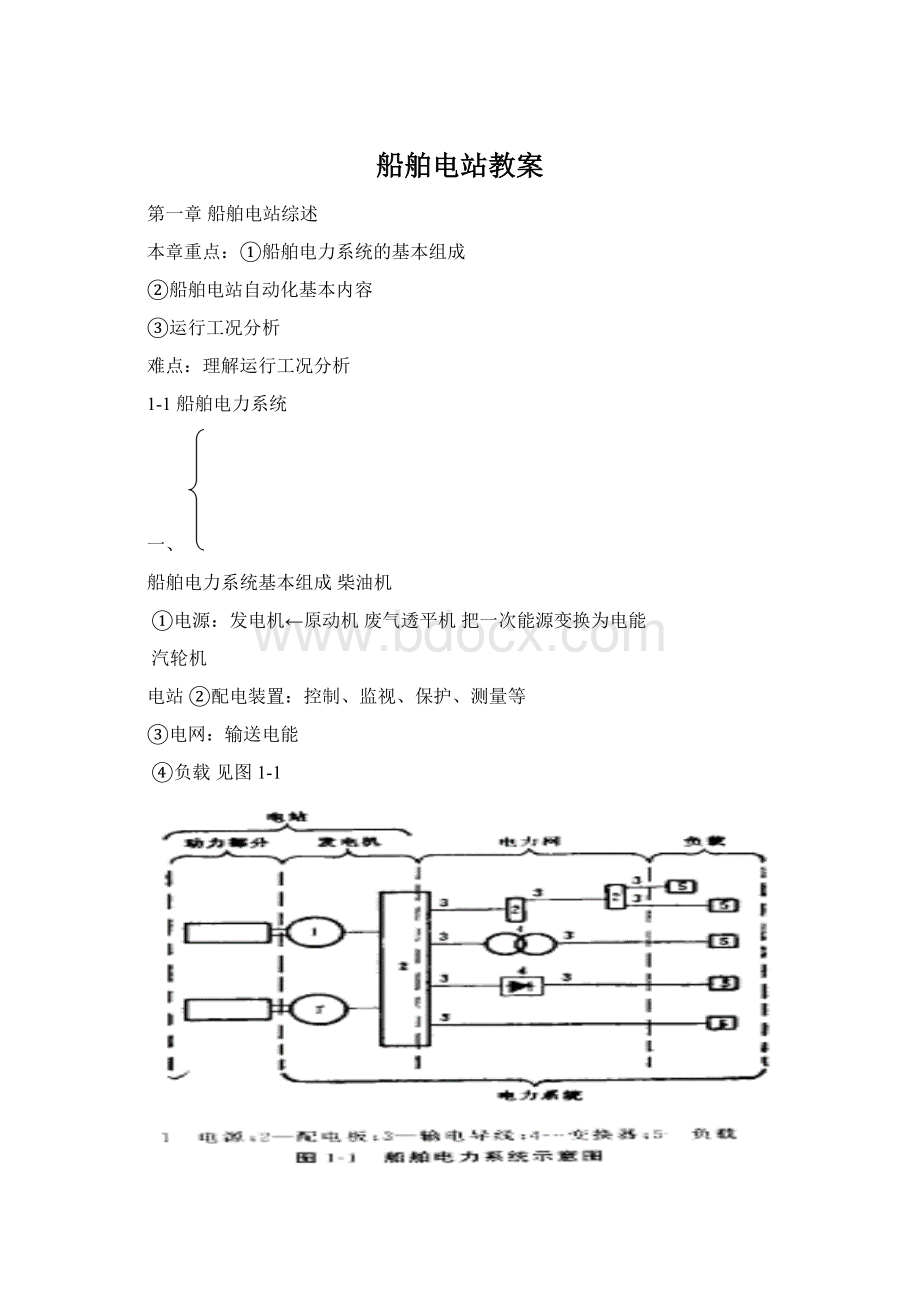
船舶电力系统基本组成柴油机
①电源:
发电机←原动机废气透平机把一次能源变换为电能
汽轮机
电站②配电装置:
控制、监视、保护、测量等
③电网:
输送电能
④负载见图1-1
二、船舶电力系统的特点
1、电网容量小,单机容量小,电压低,电网短路,短路电流比较大,短路破坏性大
2、电压波动大,因为电动机容量与发电机容量相比拟,起动冲击电流大,U↓,为此,调速器动、静态特性好,自动保护装置、可靠灵敏。
3、工作环境恶劣
特点:
1、容量增大;
2、大功率,中压,中频参数
3、新器件,电子化,微机化
§1-2船舶电站自动化
船舶电站自动化的目的:
①提高电质量
②保证供电的安全可靠
③改善劳动强度和条件
④提高电站运行经济性
一、基本内容
1、原动机的控制:
①自动起动、停车
②自动频载调节(调速器来完成)
③轻、重柴油供给自动切换
④废气涡轮加热器循环自动控制
2、发电机的控制:
①自动调压
②ACB自动合、跳闸
3.电网运行控制:
①发电机组台数的控制(投入和解列顺序选择)
②自动并车
③重载询问
④自动调频调载
⑤自动卸载
4、报警和保护:
①发电机组故障自动切除和保护
②电站工况集中显示
③召唤系统
④故障和异常工况记录打印系统
图1-2自动电站流程图
实现框图:
P267《指南》图7-31
二、自动化船舶电站的控制方式
1、模拟量控制:
调压器、调速器、单元
2、程序控制:
自动起、停(继电、PLC)微机自动控制系统
3、管理控制:
(人工)
三、船舶电站机组控制
1、电站运行方式:
《指南》P268
①单机运行:
电网失电→投入先退后进
②并联运行:
严重故障(一级故障)跳闸、断电→投入备用机组
轻故障(二级故障)先并后退并车→解列故障机组
2、电站功率管理:
(并联运行方式电站功率管理)
①按功率原则:
起动备用机80%Pe
解列运行机40%Pe
②按电流原则:
起动备用机95%Ie
解列运行机40%Ie
电流原则可防止发电机过载,但船网功率因数变化不大,普遍使用功率原则,因为测功器与自动调频调载共用
图1-3是一台废气机组与柴油发电机组的投入和解列控制的负载运行图,要求GD与GT并联运行
要求柴油机组应达到40%Pe,再增加负开GT来承担,GT达到100%时,电网再增加ΔPNet由GD承担,当GD达到90%Pe时,再起动第二台柴油发电机组。
1、卸载过程:
先GD→40%Pe(10%Pe)→解列1台GD,电网P↓→GD→40%Pe,然后,再减少GT
2、废气了组G1或轴机GSh可单独运行
负载运行图见P279《指南》7-43
3、备用机组选择和暖缸、预润滑控制
投入顺序1→2→3或3→2→1
解列顺序:
与投入逆序,先投先退
4、故障停车
①超速(原动机失控)
②滑油压力低
③冷却水高
四、报警系统和运行工况监视
(1)监视和报警工况内容
表1-1
(2)监视方式
a:
长时间监视
图1-4P343KM-2机舱监视报警装置
b:
巡视检测图1-5
①采样周期
②无轻重,大家均等机会
c:
时间分割多路传输监视方式
图1-6
第二章船舶电站自动控制装置
本章重点:
①自动并车装置
②自动调压器
③Q的分配和并联运行稳定性
④自动调频调载装置
难点:
取决于学生掌握电子技术程度和同步发电机原理
§2-1船舶同步发电机组自动并车装置
一、为什么要并车运行
①船舶电力负荷变化比较大
小负荷单机机组负荷率高效率比较高
大负荷双机机组负荷率高效率比较高
②保证供电连续性便于检修
二、同步发电机并车操作方法
1、自同期法:
待并机拖到接近同步转速,先合上主开关,并立即给发电机加励磁依靠机组间自整步作用而拉入同步。
特点:
①操作简单
②合闸瞬间冲击电流,冲击转矩大,造成电网U↓历害。
一般船上少用
2、准同步法:
1)并车条件:
当待并车与电网之间:
实际操作:
2)特点:
①冲击电流,冲击转矩小,对电力系统影响小
②并车条件要求严,只要有一个满足都会造成很大的冲击电流
3)并车装置:
灯光明暗法
灯光法灯光旋转法
a:
手动并车整步表法
粗同步法
半导体集成电路构成(模拟量)
b:
自动并车微机(数字式)
一般船上具有:
自动并车和手动并车,当自动并车装置出故障时,就采用手动并车
三、GAC-5C型船舶发电机组自动并车装置
(一)概况
特点:
①使用中央微处理器(CPU)和综合信号传输及软件处理技术达到简化硬件
②连续巡回监视、检测和自诊功能
③具有手动控制,而且手动控制优先于自动控制
④与保安系统独立
(二)系统结构
见图2-1三大部分
1、手动控制:
①主开关控制:
ACBBCS(BreakerControl-System)
②调速器控制:
GovernotControl-System)
③柴油机控制:
ECS(EngineControl-System)
独立于GAC-5C的操作控制电路
2、信号传输
它运行GAC-5C主单元与外部线路之间数据和控制信号的传输
它是采用传输线共享传输方法,这样可有效减少传输线
它采用两种类型:
1开关量的传输TM:
主开关位置,主开关控制,柴油机控制指令
2模拟量传输TMA:
U,I
见《指南》P272传输原理示意图2-2所示
工作原理:
它是采用软开关Sa和Sb,根据时钟脉冲进行同步切换,以致于不同输入传输到接收端的不同寄存器单元,然后由CPU来读取或输出
例如:
Sa在输入1位置,Sb也在寄存器输入1单元的1的位置,这样输入的信号就被传输到寄存器1,进行寄存,一直保持到下一次再输入。
由时钟脉冲控制Sa切换到输入2,同时,Sb也同步切换到寄存器输入2信号的单元,进行传输,寄存,然后再切换到3……,直到8个输入、传输一遍后,又从1号开始,就是这样周而复始扫描输入。
只要这个扫描的速度足够高于输入量的变化速度(即满足采样定理:
f采>2fmax)这种单线传输就相当于无开关的一一对应的多线并行传输效果。
这种软开关是采用高速电子开关。
本传输系统只有6根导线:
①时钟脉冲(2根:
CKP,CKN)
②信号传输线(2根:
SIGP,SIGN)
③电源线(2根:
+12V,com)
每8个输入为一组
发送器和接收器工作原理见《指南》P274
2、GAC-5C主控单元
图2-3
由工作电源,CPU处理器,输入、输出接口和自动整步控制等部分组成
①直流工作电源:
从船电24V直流电源通过有源滤波送到DC/DC变换电路进行稳压调节,获得稳压直流电源送给各个印刷板
②CPU和记忆单元:
它在EMW-1101A印刷电路板上,CPU是莫托劳拉的MC6802处理器,采用8位平行处理,EPROM有40K,RAM有16K
③输入、输出接口
a:
模拟量输入接口(TMA)(EMW-1301)
这个模块包含有TMA传输系统的基本功能,如时钟脉冲发生。
通过总线把模拟量通过本身的模数变换器变换的数字信号送到CPU处理板上,它有A/D,输入隔离电路等
b:
开关量输入接口(EMW-1501)
这块模块包含有TM传输系统的基本功能,并且两个TM传输系统是相互独立,二个TM的数字量传送给CPU板通道是电气隔离的
c:
并行输入/输出接口(EMW-1401A)
这块模块是直接连接GAC-5C主控部分的并行输入、输出与CPPU处理单元的接口,它平行输入给内部操作(EMW-1812)的报警器的开关信号,而平行输出调速器的上升或下降,主开关ACB合闸信号,当报警时,并行输出驱动报警发光二极管发光。
d:
报警板和内部操作板(EMW-1812)
通过内部操作面上的按钮,对它内部参数进行整定,操作方式的设定等操作,由平行输入、输出口(EMW-1401A)送来各种报警信号,如CPU不正常,TMA不正常,TM不正常,A/D不正常,自动整步单元不正常等
④自动整步部分(EIH-221.222)
发电机的电压由选择开关通过电压互感器降压隔离之后,送到自动整步部分,同样电网电压也是通过电压互感器降压隔离后送到自动整步部分,进行自整控制。
(三)自动整步过程
1、同步条件检查(EIH-221)
电网和待并机的电压分别通过电压互感器PT降压隔离之后直接送到同步条件检查模块,进行检测两者,ΔU是在允许范围之内(一般整定3%),检查Δf是在允许范围之内(一般整为0.3Hz),若这些条件满足,插件面板上的合闸红色指示灯亮,合闸时捕获电路就在同相位提前一个时间(一般整定在130ms)(它是采用恒定越前时间原则),向输出接口模块(EIH-141)发出允许合闸信号。
2、频率预调(EIH-222)
同样,电网和待并机的电压通过互感器PT降压后直接送到频率预板(EIH-222),检查Δf,根据Δf产生一个调速控制信号,Δf<0,加速,Δf>0,Δf=f待-f网减速,调速脉冲周期可整定在5s(它根据频差的大小和调速器的特性进行整定),调速器控制脉冲也是通过输出接口模块送出,使调速器的伺服马达正转或反转调速,当发出加速或减速信号时,EIH-222插件面板上的对应的红色指示灯会发亮。
3、输出接口(EIC-141)
合闸调速控制信号都通过该模块送出,它是把EIH-221,EIH-222和并行输入,输出接口(EMW-1401A)送来的信号进行放大,然后以继电的形式输出,
其内部各个电路图如图7-45所示,同时相应的指示灯就亮。
§2-2船舶同步发电机的自动励磁装置
(自动调压器)
一、概述
大家知道同步发电机的电枢反枢:
①纯阻性负载:
电枢反应是交轴作用,内阻,U↓
②纯电感性负载:
电枢反应是去磁作用,有效磁通φ↓,U↓
③纯电容性负载:
电枢反应是增磁作用,有效磁通φ↑,U↑(船上负载一般都是电阻电枢负载)《船设》P48页
如果同步发电机保持励磁电流恒定,那么发电机从空载到满载(保持在额定功率因数时),其端电压可降到60%~70%UN,使大多数负载无法工作,同时,在并联运行的船舶电站,也需要合理分配无功功率Q
所以,要保持电网(发电机端)电压为恒定,就得使励磁电流随负载电流,负载性质变化而变化。
要保持电网(发电机)电压的频率恒定,就得保持原动机转速恒定(由调速器来完成),所以
f(
一定)
调节油门→输出功P(f一定)
二、励磁装置分类
根据励磁调节器工作原理,可分为三大类:
扰动型,偏差型和复合型。
1、扰动型
它是按负载电流
和负载功率因数cosφ的大小进行励磁调节的装置
由上述分析可见,发电机端电压的变化是由负载的扰动量引起,所以,就可利用这个扰动量直接控制励磁电流,使得端电压尽量保持在一定范围±3%以内,它就是利用扰动,补偿扰动引起的被控量偏差,简称为“利用扰动,补偿扰动”,从控制论角度分析,由于被控量和被测量不是同一个物理量,是属于开环系统。
从控制系统指标来分析,它是一个前馈控制,因为,它是利用扰动,来补偿扰动,还没有待到被控量4发生变化,它的补偿作用已经开始2,所以,它具有动态特性好特点,但属于开环系统,无法做到时时刻刻都能等量补偿,所以,静态特性就比较差。
正是由于这一点,以后,才发展可控硅偏差型-调节器。
这种扰动型也称为不可控相励装置,根据扰动量
引入方式不同,可分为:
电流迭加,电磁迭加谐振式(简称三绕组调压器)带有曲折绕阻电磁迭加谐振式(四绕组调压器)和电势迭加,一般电势迭加比较少用,三种不可控相复励自励恒压装置的单线简图如下图所示。
2、偏差型
它是按发电机实际电压值与给定电压值(额定电压)的差值即电压偏差信号ΔU的大小调节励磁电流的装置,可见,被测量和被控制是同一个物理量,属于闭环系统,而且按给定量与实际量的误差来调节,它是一个负反馈系统,所以这种系统具有系统稳定,静态误差小(即静态特性好)的特点。
与扰动型比较,它不直接测量扰动量,而扰动量是通过电压变化反应出来,所以,它是“测量偏差,消除偏差”而与引起偏差的原因无关,它可把诸多的扰动量引起的偏差包括在内,比如说,整流二极管的温度效应等等,因此,偏差型具有很好静态特性,它调节精度1%以上,但它的动态特性差,特别是误差出现之后,未消除误差,所以,它按自动调节过程,应有测量比较环节,触发移相环节,可控硅SCR主电路等组成。
3、复合型
它具有扰动型和偏差型的两种功能,综合了扰动型和偏差型的特点,这种也称为可控复励自励恒压装置,它是在不可控相复励的基础上+电压校正器(AVR)根据AVR加入的方式不同,可分为:
交流侧分流、直流侧分流和改变不可控相复励装置元件参数三种方式。
三、不可控相复励自励恒压装置
电流叠加和三绕组的在《船舶电气设备及系统》讲述,不再得述,这里介绍具有曲折绕组的电磁叠加相复励自励恒压装置。
(一)工作原理
注意其接线:
每相铁心柱上的W1绕组总是与其滞后相上的绕组反向串联,这样就使得每相铁心柱上的两个电压绕组(W1和W4)由两个不同的相电压供电,使得自励分量比三绕组偏移了一个小角度,下以A相为例,分析其输出励磁电流复励作用。
1、自励作用
当发电机起动达到额定转速,由于发电机的剩磁电压作用,使得发电机电压达到空载额定电压UN,这个电压经移相电抗器XDK移相90º得到一个滞后于电压UA90º的电压分量IA在W1线圈就产生磁势FA并与IA1同相位,而UC同样经XDK移相90º,得到的滞后于电压UC90º的电压分量IC1,在W4线圈就产生磁势FC4并于IC1同相位。
而且在制造时,W4匝数比W1小得多,所以|FA1|《|FC4|,由于这时空载I3=0,这样,我们就可作出自励分量磁势:
FU=FA1+(-FC4)在输出绕组W2就有励磁电流Ie输出。
2、复励作用
①电流复励作用
当负载电流量不变时,即cosφ不变,电流由IG增加到IG’那么在W3绕组产生的磁势由F3增加到F3’,那么合成磁势F2也增加到F2’,可见|F2|<|F2ˊ|励磁电流Ie增加,补偿了电流增加引起端电压下降,所以,它具有电流复励作用。
②相位复励作用
当负载电流大小不变,而相位发生变化,由φ0增加到φ′,同样我们也可以作出它们的相量图,可见,|F2′|>|F2|,由于相位增加,直轴应加强(即去磁作用加强),这时,变压器输出的励磁电流增加,补偿了去磁作用,保持了端电压恒定,所以,它具有相位复励作用,我们可以作出
φ=0φ=90º的励磁磁势的变化规律,如图2轨迹所示,由于三绕组没有曲折绕组W4,只有W1。
所以,两者之间的自励分量FU就相差一个角度α,即四绕组滞后于三绕组一个α角度。
所以,在相同自励分量大小下,三绕组的相位复励变化轨迹如图1轨迹所示。
可见,在cosφ=1,|F2三|>|F2四|产生过激,造成端电压高于额定值,而在cosφ=0时,|F2三|<|F2四|,四绕组克服了在低功率因数欠激的不足,我们在设计时,总是使四绕组相对于三绕组适当地减少其自励分量IA1(或减少W1匝数),增大其复励分量(增多W3匝数),使在cosφ=0.8时,两种装置输出励磁电流相等,这样就可实现cosφ=1,|F2四|<|F2四三|而在cosφ=0时,|F2四|>|F2三|使合成的磁势F2轨迹更接近于椭圆形,励磁装置的输出特性更接近于发电机的调整特性,一般静态电压调整率可提到±2%。
其缺点:
①在高功率因数,小负载时,会出现欠励区,|F2ˊ|<|FU|,可见α↑→欠励区越大,α=5º~15º
②线路复杂,用铜量大,调试困难;
③接线与转向(相序)关系密切。
(二)装置的安装、调试及日常维护
1、安装
应使W1绕组与滞后相铁心柱上的W4绕组反向串联。
2、调试
①空载电压调整DK匝数↓
UGOUGO>UGN反之说明自励分量太大
②负载调整
UG>UGN减少W3→F3↓→F2↓→UG↓
UGcosφ=1UG>UGN增加W4→α↑,增大曲折分量,增加
cosφ=0UG反之→W4↓→α↓
②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨①②③④⑤⑥⑦⑧⑨
 升级会员
升级会员 