循迹避障智能小车.docx
《循迹避障智能小车.docx》由会员分享,可在线阅读,更多相关《循迹避障智能小车.docx(11页珍藏版)》请在冰豆网上搜索。
循迹避障智能小车
智能车可行性方案
实现功能:
小车自动测距,避障,寻迹。
技术关键:
小车的测距需要用到传感器来测量距离障碍物超声波的距离;小车避障则需要注意当小车与障碍物之间距离小于某一数值时,车通过电动机转向;寻迹则需要通过车底部的光电传感器检测行驶方向是否偏离黑线,在通过电动机调整运行方向。
一.结构框图
二.具体电路分析,
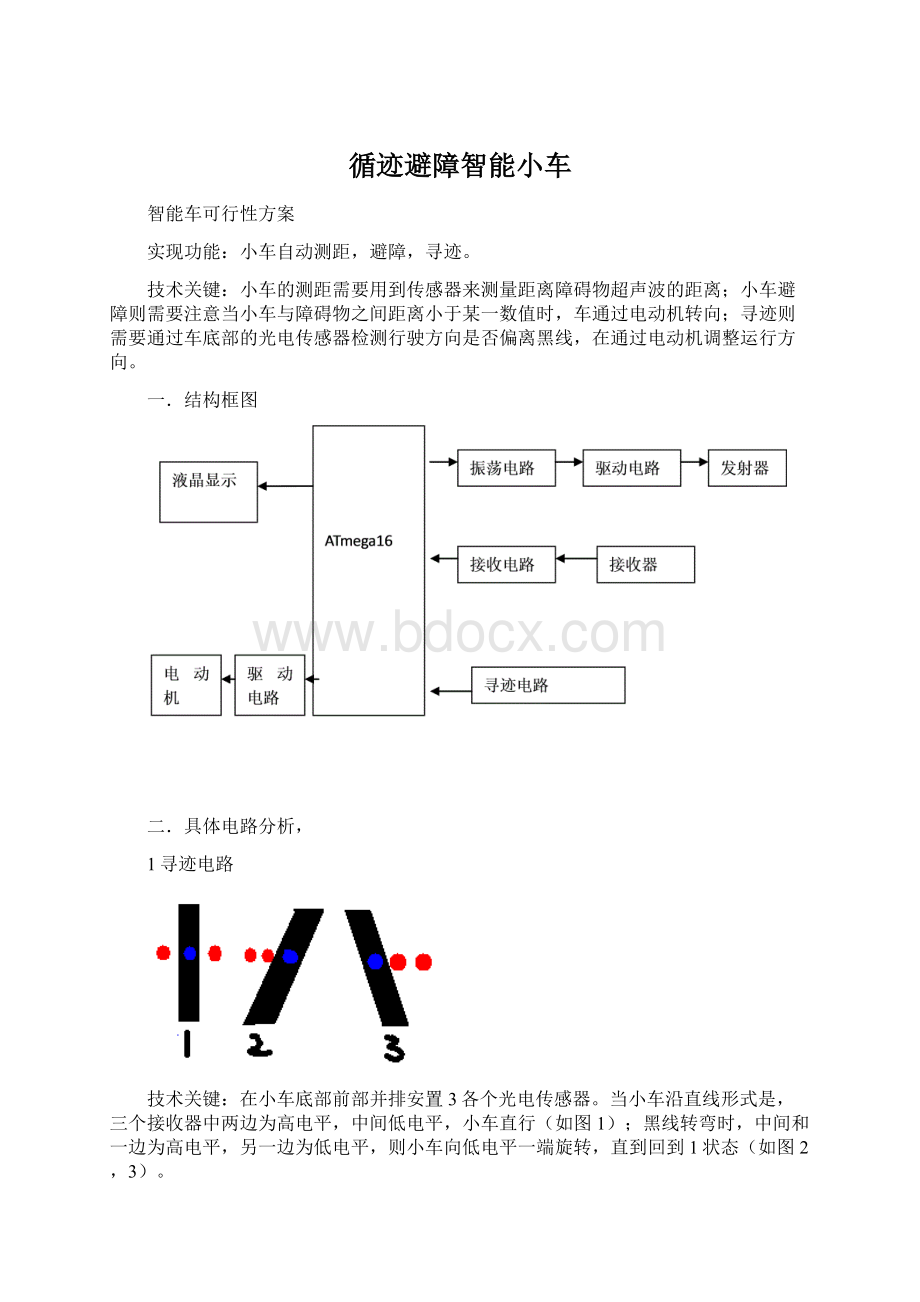
1寻迹电路
技术关键:
在小车底部前部并排安置3各个光电传感器。
当小车沿直线形式是,三个接收器中两边为高电平,中间低电平,小车直行(如图1);黑线转弯时,中间和一边为高电平,另一边为低电平,则小车向低电平一端旋转,直到回到1状态(如图2,3)。
方案1:
用红外发射管和接收管作为寻迹传感器。
红外发射管发出红外线,当发出的红外线射到白纸的平面后反射,若红外接收管能接受到反射回的光线则能检测出白纸继而输出低电平;若接受不到发射管发出的光线则输出高电平。
但是红外对管工作不稳定,且容易受外界光线的影响。
方案2:
用RPR220型光电对管,它是一种反射性光电探测器。
使用光电传感器,当接收管收到二极管发出光的反射,三级管导通。
电压送入比较器的一端,比较起的另一端输入基准电压。
当光敏二极管产生电压时,比较器输出高电平,反之输出低电平给I/O端口。
所以,为了避免外界干扰,选择第二种方案。
电路图如下
2,振荡电路的设计
技术关键:
超声波发射器发射波时须输入40KHz的正弦信号或方波。
所以在在发射器之前应有一个信号触发电路,确保发射器正常工作。
方案1:
用软件产生。
使用Atmega16中的PWM产生40KHz的方波,输出给超声波发射器,但程序较为复杂。
方案2:
用硬件产生。
使用555多谐振荡器,构成单稳态触发电路,产生40KHZ方波信号由于555内部比较器灵敏度高,而且采用差分电路形式其振荡频率受电源电压何温度变化影响很小。
有频率公式f=1.43/(R1+2R2)C
确定R1=R2=119C=0.1uF
方案3:
硬件产生,由自激振荡电路产生40KHz的正弦信号,选用RC自激振荡电路。
有公式f=1/2πRC确定
RC=3.9789×10-6
但RC自激电路震荡不稳,尤其是在电路通电起振时,正弦信号的频率和幅值都较小,超声波发射头不易起振。
所以,选择方案2.
电路图如图所示
3驱动电路
方案1:
使用74LS04(六反相器)
555产生的振荡信号从Q端口输出到74LS04的1端口分两路加到驱动电路上。
一路经U4D,U4E两只并联反相器反向后加到超声波发射器一端;另一路先经U4A反相后,再经U4B,U4C两只并联反相器再反相一次后加到超声波发射器的另一端。
两端信号正好相反故而驱动超声波发射器向外发射40KHz的差生波信号。
方案2:
用LM324驱动。
使用LM324两级放大器,加到超声波发射器的另端,在使用一级放大加到超声波发射器的另一端。
两端信号正好相反故而驱动超声波发射器向外发射40KHz的差生波信号。
经分析,使用LM324做驱动电路,电路设计较74LS04复杂,元器件较多,所以选用方案1
电路图如图
4,接收电路
方案1:
信号接收电路使用CX20106芯片。
CX20196芯片是一种信号接收芯片,具有放大,滤波,整流,去除纹波,比较等功能。
功能较全,处理信号功能较好,价格便宜,使用方便等特点。
方案2:
使用LM324芯片。
超声波接收器接受回的信号幅度较弱,须经放大器两级放大,再经滤波电路,整流电路去除纹波后,形成一比较稳定的电平,输入比较器的一端。
当接收信号处理后的电平高于比较器的基准电压,则输出高电平。
分析后可得,使用方案2的电路较为复杂,设计与调试均复杂,而方案1不仅简单易行,而且成本不高,所以选择方案1.
电路图如图
5,测距原理
利用超声波在空气中的传播速度为己知,测量声波在发出后遇到障碍物后反射回来的时间,根据发射和接受的时间差计算出发射点道障碍物的实际距离。
测距公式:
L=C*T
L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(为发射到接收时间的一半)。
6,电机驱动
方案一,采用直流电机,直流电机具有良好的调速特性,调速方便,调整范围广,过载能力强可以实现频繁的启动、制动、翻转。
但制动翻转惯性大,精密度低,控制起来比较困难。
方案2:
采用步进电机,它是一种将电脉冲转化为角位移的执行机构。
通过控制脉冲个数控制角位移量。
步进电机能够较好的满足系统要求。
故选择此方案。
电机引线没有极性限制,只需分组。
如2相双极性步进电机A与B、C与D可以互换连接,其工作不受影响,如果动力输出方向与所需不符时,可调换相接。
步进电机的转速与脉冲的速度成正比:
步进电机的转速(RPM)=脉冲速度(PPs)*60/步进电机分割数每圈
脉冲量与移动数之间关系:
位置移动量(。
)=步进电机分辨率(。
)*输入脉冲数
小车两个前轮分别用两个步进电机控制,控制小车直行,左转,右转,停止等动作。
直行时,两轮转数相等;左转时,左轮转数小。
右轮转数大;右转时,相反。
两路电机均由ATmega16的I/O端口控制。
步进电机驱动芯片
L298N是双H桥式驱动器。
L298内含的功率输出器件设计制作在一块石英基片上,由于制作工艺的同一性,因而具有分立元件组合电路不可比拟的性能参数一致性,工作稳定。
L297是步进电机控制集成芯片(包括环形分配器),可产生四相驱动信号,应用于微处理机控制两相双极性和四相单极性步进电机。
电动机可由半阶梯、正常和斩波驱动模式驱动,同时设于晶片内的PWM斩波线路容许以开关形式控制线路的电流。
此器件只需要时钟、方向和模式输入信号。
相位是由内部产生的,因此可减轻微处理机和程序设计的负担。
方案1:
单独使用驱动芯片L298N。
L298N单独驱动电动机是最高可输出2A的电流,可以驱动步进电机工作。
方案2:
用L297和L298一起驱动
步进电机驱动器使用L297+L298的经典电路设计,具有外围元件简单,工作稳定性好的特点。
L297+L298集成块是专为步进电机驱动而设计。
L298是双H桥式驱动器。
L298内含的功率输出器件设计制作在一块石英基片上,由于制作工艺的同一性,因而具有分立元件组合电路不可比拟的性能参数一致性,工作稳定。
因此选用方案2.
L297与L298典型驱动电路线路图:
元器件的选择:
NE555,
74LS04,
CX20106A,
RPR22O
L297,L298,
T40-16,R40-16
型号 步矩角 静扭矩(N.M) 电流(A) 机身长(mm)
57BYG250C 1.8° 0.88 1.5 76
软件设计流程图;
1.测距
2.避障:
大
避障详细论述:
超声波传感器测距范围存在盲区,所以,我设定了一个值,这个值用L表示。
L要大于或等于传感器的盲区的测量范围的最大值。
由于小车一直在不断向前运动,所以测试的距离S是改变的。
当测试的距离S大于L时,小车不改变方向,按照原来的轨迹行驶,当测试的距离S小于L时,同时改变两个步进电机,但是改变速度不同,一个快,一个慢,小车向改变速度慢的方向旋转。
3.寻迹:
寻迹详细论述:
实现寻迹功能的电路采用了光电传感器。
在小车底部分别放一个发射光电传感器和三个接收光电传感器,发射光电传感器发出光后,黑色路面吸收光,反射的光强很弱,接收光电传感器此时接收的是低电平,白色路面反射的光强很强,接收光电传感器此时接收的是高电平。
当两个接收光电传感器同时接收的是高电平时,小车在黑色路面上行驶,否则小车偏离了黑色路面。
ATMEGA16的输出端控制步进电机。
查阅的资料:
1.基于超声波传感器测距的家用自主式移动吸尘器路径规划算法
王火亮,孙守迁
浙江大学信息学院计算机科学与工程学系
2.基于超声波传感器的测距报警系统设计
胡瑞,周锡青
沈阳理工大学信息科学与工程学院
3.基于超声波传感器的测距系统设计
赵广涛,程荫杭
北京交通大学
4.新型高精度一体反射型超声波传感器测距系统研制
华亮,堵俊,吴晓
南通大学电气工程学院,江苏南通,浙江工业大学智能信息研究所
5.移动机器人多传感器测距系统研究与设计
梁毓明,徐立鸿
同济大学电子与信息工程学院,江西理工大学机电工程学院
6.智能型色标传感器的研制
李万军,杨永才,刘立立
上海理工大学光学与电子信息工程学院
7.色标传感器工作原理初探
王良,李鸿
中盐枣阳盐化有限公司,自贡市职业培训学院
8.传感器与智能车路径识别
王明顺,沈谋全
东北大学信息科学与工程学院
9.基于AT89C52单片机的容栅传感器测距系统
王安敏,王辛立,崔伟
青岛科技大学机电工程学院
10.基于AT89S52超声波测距仪设计
朱士虎,何培忠,王立巍
徐州师范大学物理与电子工程学院
11.激光传感器在智能车中的应用
周文龙,徐国伟
天津工业大学
12.竞赛用智能车的设计
孙辉,张参参,史久根
合肥学院,合肥工业大学
13.智能车的模型的设计与制作
周健,陈朝和,黄冬华
14.步进电机定位系统的单片机软件设计
陈晓磊
苏州工业职业技术学院电子工程系
15.基于集成芯片的步进电机驱动器的设计
韩铮,张润和,王冰。
刘晓宇
内蒙古工业大学
 升级会员
升级会员 