CCD测量光纤直径系统设计word文档.docx
《CCD测量光纤直径系统设计word文档.docx》由会员分享,可在线阅读,更多相关《CCD测量光纤直径系统设计word文档.docx(8页珍藏版)》请在冰豆网上搜索。
CCD测量光纤直径系统设计word文档
CCD测量光纤直径系统设计
SA11009045张海滨
CCD成像测量技术是测量方法中的一个较新的分支,其特点是利用CCD(电荷耦合器件)对被测物体进行光学成像,然后采用图像处理技术完成非接触测量。
利用CCD对光纤直径进行测量采用的就是这种技术,本设计采用CCD平行光投影法,即通过照明光路用平行光将被测工件投影在CCD光敏元件上成像,从而通过像的尺寸获得物体的尺寸。
CCD以脉冲的形式输出视频信号,每一个离散电压信号的大小对应着该光敏元接收光强的强弱,而信号的时序则对应CCD光敏元位置的顺序。
CCD用自身电子扫描方式完成信息从空间域到时间域的变换。
但是经过CCD输出与被测直径相对应的离散电信号,但此信号幅值较低,质量也较差,必须对其进行滤波、放大、整形、二值化等处理后才能输出给微机进行计算分析。
所以本次作业将重点对CCD输出信号的后续工作如滤波电路、二值化电路和微机接口等模块进行分析设计。
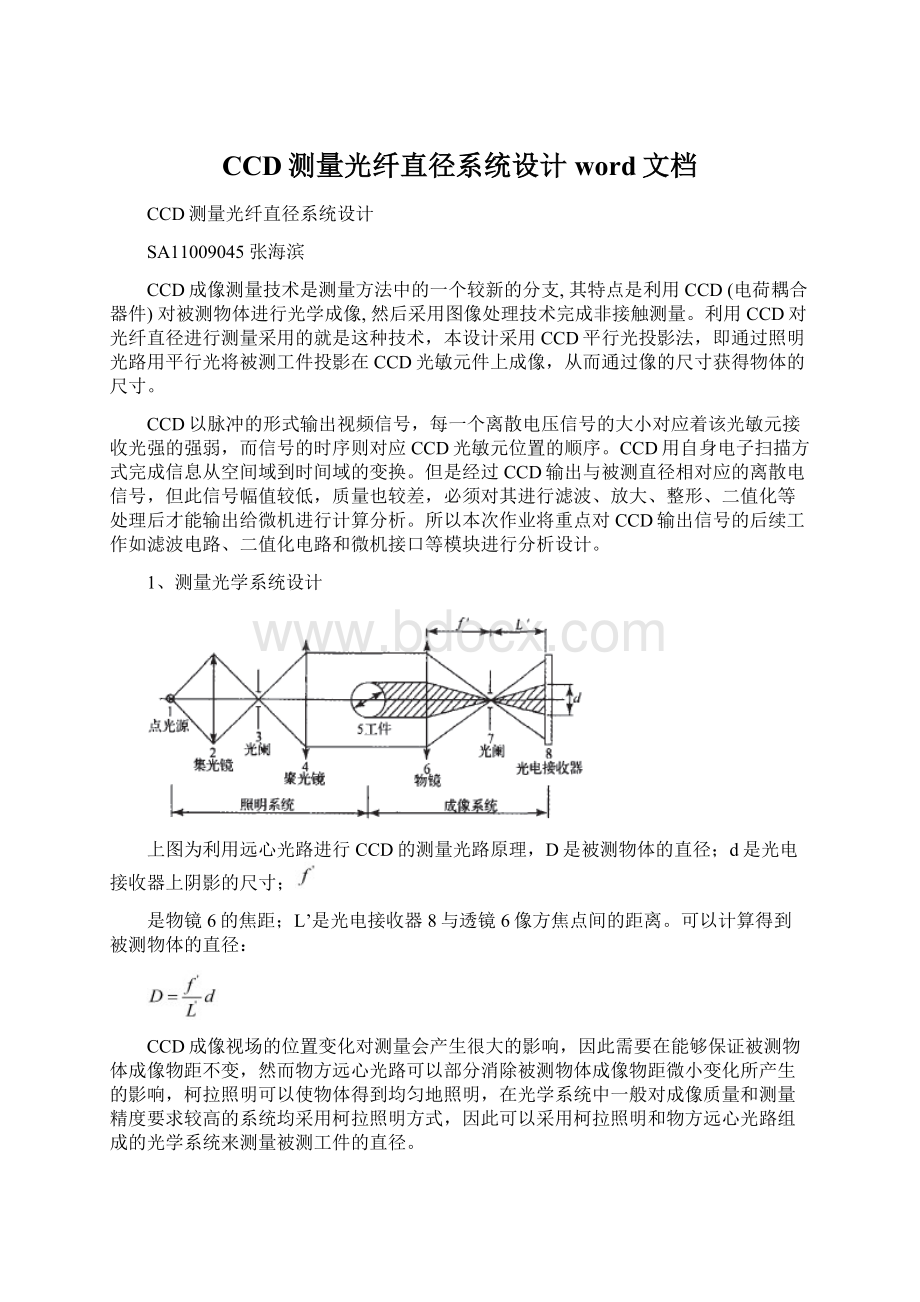
1、测量光学系统设计
上图为利用远心光路进行CCD的测量光路原理,D是被测物体的直径;d是光电接收器上阴影的尺寸;
是物镜6的焦距;L’是光电接收器8与透镜6像方焦点间的距离。
可以计算得到被测物体的直径:
CCD成像视场的位置变化对测量会产生很大的影响,因此需要在能够保证被测物体成像物距不变,然而物方远心光路可以部分消除被测物体成像物距微小变化所产生的影响,柯拉照明可以使物体得到均匀地照明,在光学系统中一般对成像质量和测量精度要求较高的系统均采用柯拉照明方式,因此可以采用柯拉照明和物方远心光路组成的光学系统来测量被测工件的直径。
而且可以通过改变光阑3的大小,可控制成像系统中的孔径角的大小;改变集光镜2的镜框大小,可改变照明系统的孔径角的大小,从而控制被照物面的范围。
2、信号处理部分设计
CCD输出的视频信号不能直接进行汁数处理及用于尺寸计算。
首先由于信号微弱,且存在高频干扰,所以需要进行滤波放大。
另外,光源发光强度不稳定,光路系统的调节也不可能尽善尽美,光带边缘存在一定色散,输出信号在光照和阴影边界处存在着由明到暗的过渡。
为了得到与工件尺寸相关的阴影部分尺寸,需要对CCD输出视频信号进行二值化处理,将其转化成矩形波,然后用脉冲填充,计数器汁数,再通过微机接口与微机相连,结合控制程序进行数据采集和信息处理。
因而整个信号处理阶段的流程框图可以用下图表示:
经过测量系统后,CCD成像系统输出的时序视频信号应当如下图所示:
可以知道CCD输出信号是时钟频率为1MHz的小脉冲信号,幅值很小且叠加在一直流电平上,还有噪声存在,阴影区和和光照区分界模糊,此信号不能直接进行计数。
首先应通过电容隔直,变成只有交流的信号。
3、滤波器选用
接下来对信号进行滤波和放大处理,由于我们需要滤掉小脉冲信号,为高频成分,所以选用一低通滤波器来实现。
而该信号幅值非常小,所以采用有源滤波器来对信号进行放大处理,因为有源滤波器除了具有滤波功能外,还能够实现信号的放大和缓冲作用;有源滤波器里面有采样系统,根据采样结果,施加以大小相同,方向相反的谐波电流,予以抵消,所以,其滤波能力和效果在一定范围内是可变的,适用于信号处理;而且有源滤波器具有自适应功能,可自动跟踪补偿变化着的谐波,具有高度可控性和快速响应的特点。
滤波过程中,需要对通带以外的频率成分实现较快的衰减,二阶滤波器能够实现40db/十倍频的衰减速度,响应较快。
综合上述描述,滤波器可以选用二阶有源低通滤波器。
根据题意,电路需要实现的功能有:
电压从500mv到3-5V的增益,频率成分1MHz的滤除。
所以滤波器的主要设计参数可以设定如下:
截止频率2KHz;而滤波器的品质因数不可过小,常见的压控型有源滤波器的Q与增益A有关系:
Q=1/3-A,所以增益不超过3,若要达到题目要求的10倍增益,可以在滤波器的后方级联一个放大电路,比如取Q=0.707,得到滤波器的放大增益为1.5,级联的方法电路放大倍数A1=6即可满足要求。
二阶低通滤波器传递函数:
其中:
A0为滤波器增益,
为特征频率,Q为品质因数。
二阶有源低通滤波器基础电路级联一个反相放大电路
4、信号处理方法
经过滤波放大后的信号波形可以用下图近似表示:
(1)、二值化处理(不采用A/D转换)
由于需要测量测量光纤直径,就需要知道CCD成像的阴影轮廓位置,而实际七在成像面的投影像轮廓的亮度分布不是突变的,而是有一个由暗到明的过渡过程。
过渡过程所占的脉冲个数越少,也就越有利于暗明界线的正确判断。
用远心光路照明时,可以认为像的真正轮廓大约在最大亮度的50%处,用二值化方法来判断影像的实际位置和尺寸。
这里可以采用比较法,比较法采用电压比较器,是实现二值化处理最简单的方法。
将CCD经滤波放大处理的视频信号送往该比较器的同相端,用一个电平作为阈值送到该比较器的反相端,对CCD视频信号进行切割。
这样在比较器的输出端就可以得到信号二值化处理的结果,即视频信号高于阈值的部分均输出高电平,而低于阈值部分均输出低电平,形成了具有一定宽度的二值化电平的脉冲信号,将时域上的脉冲信号转化为空间域就可得到所要测量的光纤直径。
比较法最重要的参数是设计比较器的阈值。
由于在测量过程当中,所使用的光源难免会有供电电压波动、光学窗口污染、灰尘等因素的变化导致光强的变化,使得CCD输出的视频信号发生抖动,为了避免这些因素对测量带来的影响,可以采用浮动电平来确定阈值,即实时地取CCD输出方波的峰值和谷值,然后取其峰、谷值的1/2作为切割比较电平,也就是切割电平随着峰谷值变化而上下浮动以保证取的是方波的l/2处。
二值化流程示意图如下:
经过上述二值化处理之后,我们需要进一步得到二值化信号所覆盖的CCD像元数目。
由于每个CCD像元的尺寸为7.4X7.4um2,直接得到尺寸的话误差是两个光敏单元的间距14.8um。
为了得到更高的测量精度,可以使用频率更高的时钟脉
冲对二值化的信号宽度进行填充计数。
由于原始CCD视频读出信号OS的频率为:
f=1MHz,每一个脉冲代表7.4um,现在采用10MHz的时钟脉冲进行填充计数,那么每个脉冲代表的尺寸为0.74um,可以减小测量误差。
得到测量的光纤尺寸:
(n为视频信号内10MHz脉冲数)
(2)使用A/D转换测量
使用A/D转换进行测量,是指在进行CCD输出视频信号进行放大处理之后,将模拟信号通过告诉A/D装置进行模数转换。
测量时采用最大转换速率能达到20Ms/s的A/D转换芯片(比如TI公司的TLC5510A),CCD的时钟频率为1MHz,这样的A/D转换芯片完全能满足处理速度需求。
由于CCD的复位脉冲RS每到来一次,CCD将输出一个光敏单元信号,利用CPLD在驱动CCD的同时引出一个CLK信号与复位脉冲RS同步,这样就可以保证A/D转换和光敏单元信号的输出在时间上同步。
每次模数转换完成都将由CPLD产生中断信号,以提示处理器(比如ARM的STM或者AVR等)提取数据。
测量系统原理框图如下:
当全部像敏单元信号转化结束之后,A/D器件停止工作,处理器得到一个中断信号,获得A/D转换后的数据,通过数据总线输入到缓存器(比如SARM,三星公司的K1S2816BCM芯片,8MX16bit)中缓存。
数据处理时,处理器从SARM中读取数据。
首先滤掉波形中的毛刺,剔除实际应用中不可能出现的数值。
然后对数据进行计算,由于采用8位A/D转换芯片时,每个像敏单元的模拟信号都被表示为一个0-225之间的十进制数值,然后将每个数值与设定好的阈值进行比较(比如采用剔除毛刺后的最大最小值平均值作为阈值),当高于阈值电压则高位寄存器内的值加1,反之低位寄存器内的值加1。
将所有得到的数值比较完毕之后,得到低位寄存器的数值,即得到CCD被光纤遮挡而未能感光的像敏单元数m,将m乘以CCD像敏单元尺寸7.4um,再乘以光路的放大倍数即得到光纤尺寸:
5、误差分析
1、振动情况对结果影响
不妨设物体作简谐振动,容易看出当振动方向垂直于光轴时,测量误差直接与振幅A相关。
当振动频率刚好为转换频率的整数倍时,振动所带来的误差很小。
对于其他情况,当振动频率大于CCD的转换频率时,误差较大。
因而增大转换频率到大于振动频率时,误差开始变小,并随着频率的进一步增大而不断减小。
当振动方向沿着光轴时,即被测量物平面偏离基准位置。
由于在测量时采用物方远心光路,主光线的方向不随物平面的偏离而改变,但像点弥散斑直径大小有明显改变。
光路如下图所示:
设物面偏移量为l,当系统孔径光阑直径较小且l也较小时,像平面偏移量l'可近似表示为:
其中,β为成像物镜的横向放大率。
由于像平面位移,形成了像点弥散。
弥散直径d可用下式计算:
其中:
为像方视场角,U为物方孔径角。
根据上式可以看出此时测量误差与振幅和频率有关外,还与成像光路系统的物方孔径角U和像方视场角
有关,因而可以通过减小U和增大
来减小误差。
2、其他因素带来的误差
(1)、光源的影响。
试验中使用的光源不是严格意义上的定强度光,光能度在时间上不均匀,从而引起CCD器件接收到的信号产生变化,影响到测试结果。
可以采用高精度稳定光源进行实验,同时可以优化后续信号处理的算法。
(2)、成像物镜的质量。
由于在计算待测直径的时候使用了放大倍率
,所以此时会受到物镜的成像质量影响。
可以采用随时标定的方法消除成像物镜质量和平行光源的准直偏离造成的误差。
(3)、CCD感光单元灵敏度不均匀性误差。
以CCD作为光电接收器件,其CCD感光单元灵敏度均匀性是一个重要的指标。
CCD感光单元灵敏度误差是由于制造过程中半导体材料杂质不均匀所造成的,同时各个感光单元有效面积的不一致也是影响灵敏度不均匀误差的一个重要因素。
CCD感光单元灵敏度误差,对于同一片CCD而言其分布是固定的,而在实际测量中,同一被测物在不同位置或不同直径的被测物图像边缘落在不同单元所产生的误差是不同的,因此CCD感光单元灵敏度不均匀性表现出来的是随机误差。
(4)、电噪声误差。
该部分误差主要来自CCD的暗电流噪声和信号处理电路的噪声。
CCD的暗电流噪声是CCD器件在一定时间内,由于热电荷蓄积产生的噪声信号。
由于电噪声是随时间变化的随机噪声,当我们对测量结构采用多次平均滤波后,会明显抑制电噪声所带来的误差。
(5)、考虑到CCD像敏元可能与主光轴不垂直,而是存在一定的夹角,也将引入系统误差。
(6)、环境因素的影响。
杂散光、环境温度变化、空气扰动、灰尘、电磁干扰等环境条件对测量结果影响是比较复杂的。
环境因素影响可能表现为小的随机误差,也可能表现为粗大误差,这些因素难以预测,我们要采取措施加以抑制。
在测径系统实施的时候可以采用一些方法减小环境的影响,如采用孔径光阑和密封的方式可以消除杂散光和空气扰动的影响。
(7)、对于两种不同的数据处理方法,可能会有不能的原因导致误差。
在利用二值化进行处理时,阈值选取和脉冲填充计数的准确度会对结果产生较大影响;而在使用A/D转换进行处理时,A/D转换器的一些指标比如转换速率、量化误差、偏移误差、满刻度误差等均会给测量结果带来差异,而且在模数转化的过程中,对一些毛刺(不可能出现的数值)的数字滤波效果也会对结果带来影响。
两者在速度上基本都能实现实时输出,信号处理的频率与CCD的时钟频率相匹配。
但区别在于二值化处理的方法需要在信号滤波放大后重新进行一轮脉冲填充计数,时间基本与信号输出所耗时一样;A/D转换则是在CCD的信号同步数字化之后,需要进行数字信号比对分析,于处理器的性能相关。
参考文献
[1]张建荣,姜昱明.CCD成像在线测量玻璃棒直径的方法研究.应用光学.2004,25(3):
53-56
[2]戴梦楠.CCD非接触式测径系统的设计及误差分析.武汉船舶职业技术学院学报.2008年第6期
[3]郑理.CCD投影法直径测量系统的信号处理电路.电子测量技术.2009年8月第32卷第8期
[4]吴东兴.基于ARM的细丝直径测量系统的研究和实现.硕士学位论文.2009年5月1日
[5]李焘,周云飞.基于线阵CCD的钢丝直径测量系统设计.科学技术与工程.2011年6月第11卷第18期
[6]崔占涛,王卫华,樊建春,张来斌.CCD在钻杆直径测量中的应用研究.石油机械.2005年第33卷第11期
[7]李江昊,李炳新,于荣金.塑料光纤直径测量系统.光学技术.2003年9月第29卷第5期
[8]李为民,俞巧云,裘凌红.投影法CCD测径系统.仪表技术与传感器.2001年
[9]徐国盛.一维线阵CCD边缘检测中阈值电平的确定.潍坊学院学报.2008年3月第8卷第2期
(注:
素材和资料部分来自网络,供参考。
请预览后才下载,期待你的好评与关注!
)
 升级会员
升级会员 