学习51单片机与PS2鼠标程序+LCD1602显示坐标.docx
《学习51单片机与PS2鼠标程序+LCD1602显示坐标.docx》由会员分享,可在线阅读,更多相关《学习51单片机与PS2鼠标程序+LCD1602显示坐标.docx(14页珍藏版)》请在冰豆网上搜索。
学习51单片机与PS2鼠标程序+LCD1602显示坐标
学习51单片机与PS2鼠标程序
简介:
PS2鼠标,LCD1602显示坐标,有LED指示灯,等等~~~~~~其实发现学起来也很简单。
第一步:
PS/2接口和协议简介
1PS/2接口和协议
1.1接口的物理特性
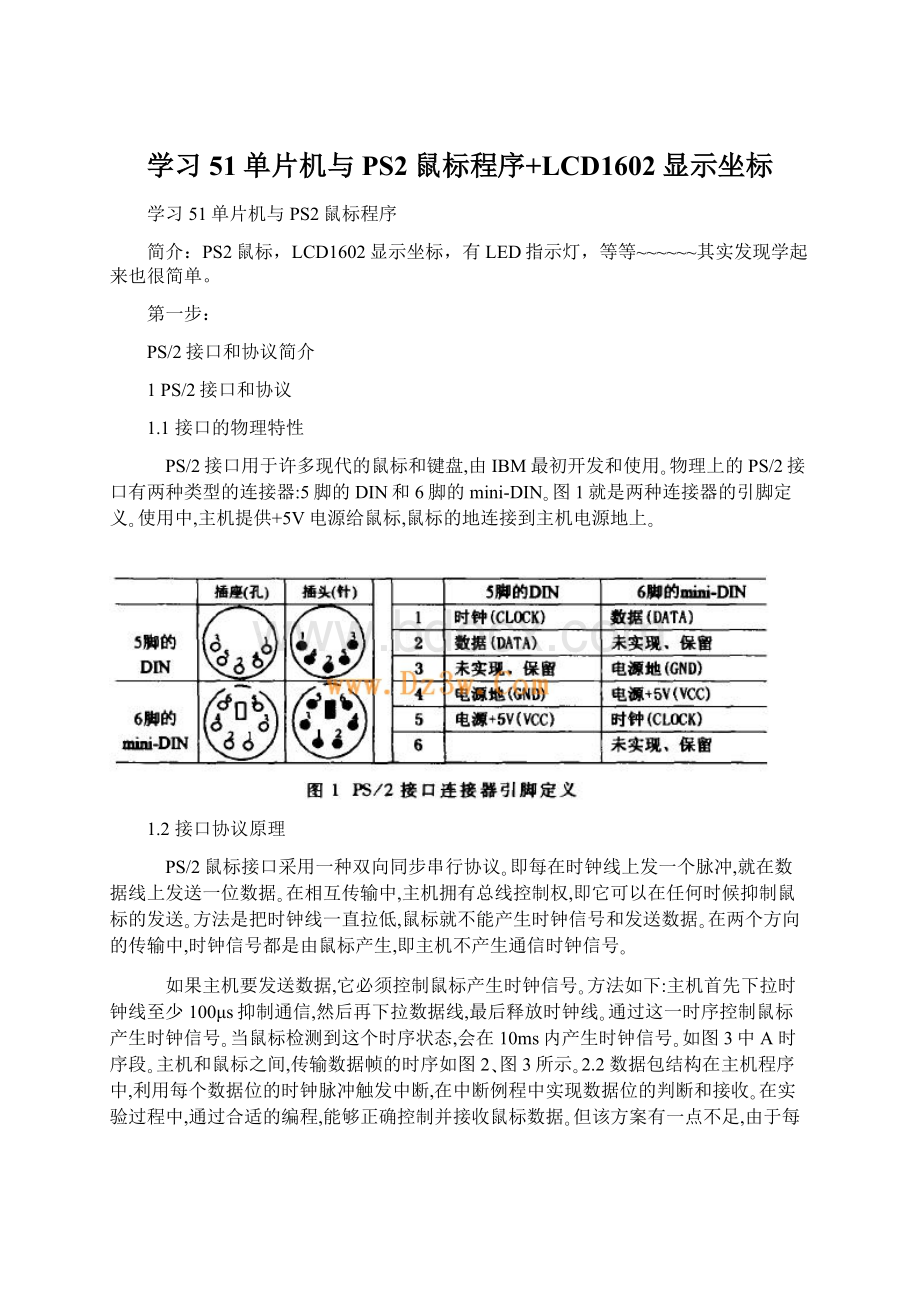
PS/2接口用于许多现代的鼠标和键盘,由IBM最初开发和使用。物理上的PS/2接口有两种类型的连接器:
5脚的DIN和6脚的mini-DIN。图1就是两种连接器的引脚定义。使用中,主机提供+5V电源给鼠标,鼠标的地连接到主机电源地上。
1.2接口协议原理
PS/2鼠标接口采用一种双向同步串行协议。即每在时钟线上发一个脉冲,就在数据线上发送一位数据。在相互传输中,主机拥有总线控制权,即它可以在任何时候抑制鼠标的发送。方法是把时钟线一直拉低,鼠标就不能产生时钟信号和发送数据。在两个方向的传输中,时钟信号都是由鼠标产生,即主机不产生通信时钟信号。
如果主机要发送数据,它必须控制鼠标产生时钟信号。方法如下:
主机首先下拉时钟线至少100μs抑制通信,然后再下拉数据线,最后释放时钟线。通过这一时序控制鼠标产生时钟信号。当鼠标检测到这个时序状态,会在10ms内产生时钟信号。如图3中A时序段。主机和鼠标之间,传输数据帧的时序如图2、图3所示。2.2数据包结构在主机程序中,利用每个数据位的时钟脉冲触发中断,在中断例程中实现数据位的判断和接收。在实验过程中,通过合适的编程,能够正确控制并接收鼠标数据。但该方案有一点不足,由于每个CLOCK都要产生一次中断,中断频繁,需要耗用大量的主机资源。
2PS/2鼠标的工作模式和协议数据包格式
2.1PS/2鼠标的四种工作模式
PS/2鼠标的四种工作模式是:
Reset模式,当鼠标上电或主机发复位命令0xFF给它时进入这种模式;Stream模式鼠标的默认模式,当鼠标上电或复位完成后,自动进入此模式,鼠标基本上以此模式工作;Remote模式,只有在主机发送了模式设置命令0xF0后,鼠标才进入这种模式;Wrap模式,这种模式只用于测试鼠标与主机连接是否正确。
PS/2鼠标在工作过程中,会及时把它的状态数据发送给主机。发送的数据包格式如表1所示。
Byte1中的Bit0、Bit1、Bit2分别表示左、右、中键的状态,状态值0表示释放,1表示按下。Byte2和Byte3分别表示X轴和Y轴方向的移动计量值,是二进制补码值。Byte4的低四位表示滚轮的移动计量值,也是二进制补码值,高四位作为扩展符号位。这种数据包由带滚轮的三键三维鼠标产生。若是不带滚轮的三键鼠标,产生的数据包没有Byte4其余的相同。
第二步:
/**********************XXXX.C部分*********************/
#include
#include"mouse.h"
#include"LCD1602_4.h"
#include"DELAY52.h"
sbitbeep=P3^7;
voidmain()
{
LCD1602_Init();//初始化液晶1602
Init_mouse();
mouse_send_data(0xf4);//向鼠标发送0xF4命令发其开始工作
//mouse_send_data(0xc8);
//mouse_send_data(0x64);
//mouse_send_data(0x50);
EX1=0;//关掉外部中断以避开鼠标发回的应答
delayms(100);
EX1=1;//重开外部中断
while
(1)
{led=1;
CLEARSCREEN;//清屏
LCD1602_write_string(0,0,"x:
");
num(0,2,move_x);//x坐标值
LCD1602_write_string(0,8,"y:
");
num(0,10,move_y);//y坐标值
//LCD1602_write_string(1,8,"z:
");
//num(1,10,move_z);//y坐标值
if(mouse_data[0]&0x01)//如果点下左键
{
beep=0;
LCD1602_write_string(1,0,"left");
}
elseif(mouse_data[0]&0x02)//如果点下右键
{
beep=0;
LCD1602_write_string(1,0,"right");
}
elseif(mouse_data[0]&0x04)//如果点下中键
{
beep=0;
LCD1602_write_string(1,0,"middle");
}
else
{
beep=1;
LCD1602_write_string(1,0,"nothing");
}
delayms(50);
}
}
/********************XXX.H文件部分**********************/
#ifndefMOUSE_H
#defineMOUSE_H
#include"DELAY52.h"
//Setsamplerate200;
//Setsamplerate200;
//Setsamplerate80;
sbitmouse_SDA=P3^4;//数据线P3_5
sbitmouse_CLK=P3^3;//时钟线P3_3
sbitled=P3^6;
//sbitled1=P1^3;
ucharbdatamouse_byte;//接收字节bdata-->可寻址的片内RAM
sbitmouse_byte_bit0=mouse_byte^0;//mouse_byte第0位
sbitmouse_byte_bit1=mouse_byte^1;//mouse_byte第1位
sbitmouse_byte_bit2=mouse_byte^2;//mouse_byte第2位
sbitmouse_byte_bit3=mouse_byte^3;//mouse_byte第3位
sbitmouse_byte_bit4=mouse_byte^4;//mouse_byte第4位
sbitmouse_byte_bit5=mouse_byte^5;//mouse_byte第5位
sbitmouse_byte_bit6=mouse_byte^6;//mouse_byte第6位
sbitmouse_byte_bit7=mouse_byte^7;//mouse_byte第7位
ucharbdatamouse_fuction;//功能信息字节
ucharmouse_buffer[11];//接收位数据缓冲区
ucharmouse_buffer_bit=0;//mouse_buffer[mouse_buffer_bit]
ucharmouse_data[3];//接收鼠标数据缓冲区,分别存放:
功能信息字节,x位移量,y位移量
ucharmouse_data_bit=0;//mouse_data[mouse_data_bit]
uintmove_x=10000;//存放横坐标
uintmove_y=10000;//存放纵坐标
voidInit_mouse(void)
{
TCON=0x00;////中断触发方式0
EA=1;//开放中断
EX1=1;//允许外部中断1
ET0=0x01;//允许全局中断,允许设定时器/计数器0溢出中断开定时器中断0
PX1=1;//设置中断优先级设外部中断1为最高优先级别
}
/***********************************************************************
发送数据
************************************************************************/
voidmouse_send_data(uchardat)
{
uchari;
EX1=0;/*关闭外部中断1*/
ACC=dat;/*将要发送的数据放入A寄存器*/
mouse_CLK=0;/*拉低时钟线*/
delay10us(200);/*延时100us以上*/
mouse_SDA=0;/*拉低数据线*/
delay10us(40);
mouse_CLK=1;/*释放时钟线*/
for(i=0;i<=7;i++)/*低位在前,一次发送8个数据位*/
{
while(mouse_CLK==1);/*等待设备拉低时钟线*/
mouse_SDA=(dat>>i)&0x01;/*发送数据位*/
while(mouse_CLK==0);/*等待设备释放时钟线*/
}
while(mouse_CLK==1);
mouse_SDA=~P;/*发送校验位,奇校验*/
while(mouse_CLK==0);
while(mouse_CLK==1);
mouse_SDA=1;/*发送停止位*/
while(mouse_CLK==0);
while(mouse_CLK==1);/*应答位*/
while(mouse_CLK==0);
EX1=1;/*打开外部中断1*/
}
/*********************************************
奇校检
**********************************************/
ucharCheckout(void)
{
ACC=mouse_byte;
if(~P==mouse_buffer[9])
return1;
else
return0;
}
/*********************************************************
数据分析及处理
**********************************************************/
voiddata_analyse(void)
{
//将收到的11位信号中截取8位数据放进mouse_byte
mouse_byte_bit0=mouse_buffer[1];
mouse_byte_bit1=mouse_buffer[2];
mouse_byte_bit2=mouse_buffer[3];
mouse_byte_bit3=mouse_buffer[4];
mouse_byte_bit4=mouse_buffer[5];
mouse_byte_bit5=mouse_buffer[6];
mouse_byte_bit6=mouse_buffer[7];
mouse_byte_bit7=mouse_buffer[8];
if(Checkout())//如果校验正确
{
if(mouse_data_bit<3)
mouse_data[mouse_data_bit++]=mouse_byte;
if(mouse_data_bit==3)
{
mouse_data_bit=0;
if(mouse_data[0]&0x10)//如果"Xsignbit"为1,表示鼠标向左移
{
move_x-=(256-mouse_data[1]);//x坐标减
}
else
{
move_x+=mouse_data[1];//x坐标加
}
if(mouse_data[0]&0x20)
{
move_y-=(256-mouse_data[2]);//y坐标减
}
else
{
move_y+=mouse_data[2];//y坐标加
}
}
}
}
/**************************************************
外部中断1
***************************************************/
voidReceiveData(void)interrupt2
{led=0;
if(mouse_buffer_bit<=10)
{
while(mouse_CLK==0);//等待设备拉高时钟线
mouse_buffer[mouse_buffer_bit++]=mouse_SDA;//接收数据
}
if(mouse_buffer_bit==10)
{
data_analyse();//数据分析及处理
mouse_buffer_bit=0;
}
}
#endif
/********************XXX.H文件部分**********************/
#ifndefLCD1602_4_H
#defineLCD1602_4_H
#include
#include"DELAY52.h"
#defineLCD1602_DATAP0
#defineCLEARSCREENLCD1602_write_cmd(0x01)
sbitLCD1602_RS=P2^5;
sbitLCD1602_RW=P2^6;
sbitLCD1602_EN=P2^7;
//**********************************************************************
voidLCD1602_Init(void);//液晶初始化
voidLCD1602_write_cmd(ucharcommand);//写命令
voidLCD1602_write_data(uchartemp);//写数据
voidLCD1602_set_xy(ucharx,uchary);//设置坐标
voidLCD1602_write_char(ucharx,uchary,uchardat);//写一个字符到第x行y列
voidLCD1602_write_string(ucharx,uchary,uchar*s);//写字符串到第x行y列
voidLCD1602_Read_BF(void);//读忙信号
voidnum(ucharx,uchary,uintn);//在第x行,第y列显示整型数字n
//**********************************************************************
voidLCD1602_Init(void)
{
LCD1602_write_cmd(0x28);
LCD1602_write_cmd(0x28);
LCD1602_write_cmd(0x28);//设置4位数据传输模式
LCD1602_write_cmd(0x0C);
LCD1602_write_cmd(0x80);
CLEARSCREEN;
}
voidLCD1602_Read_BF(void)
{
LCD1602_RW=1;//RW1
LCD1602_RS=0;//RS0
LCD1602_EN=1;//EN1ReadBF
LCD1602_DATA=LCD1602_DATA&0x0F|0xf0;
while(LCD1602_DATA&0x80);
LCD1602_EN=0;
}
voidLCD_en_write(void)//EN端产生一个高电平脉冲,写LCD
{
LCD1602_EN=1;
_nop_();
LCD1602_EN=0;
}
//*************************************
voidLCD1602_write_cmd(ucharcommand)
{
LCD1602_Read_BF();
LCD1602_RS=0;//RS0
LCD1602_RW=0;//RW0
LCD1602_DATA&=0x0F;
LCD1602_DATA=command&0xf0|LCD1602_DATA&0x0f;
LCD_en_write();
command=command<<4;
LCD1602_DATA&=0x0F;
LCD1602_DATA=command&0xf0|LCD1602_DATA&0x0f;
LCD_en_write();
}
//*********************************
voidLCD1602_write_data(uchardat)
{
LCD1602_Read_BF();
LCD1602_RS=1;//RS1
LCD1602_RW=0;//RW0
LCD1602_DATA&=0x0F;
LCD1602_DATA=dat&0xf0|LCD1602_DATA&0x0f;
LCD_en_write();
dat=dat<<4;
LCD1602_DATA&=0x0F;
LCD1602_DATA=dat&0xf0|LCD1602_DATA&0x0f;
LCD_en_write();
}
//**********************************************
voidLCD1602_set_xy(ucharx,uchary)
{
ucharaddress;
y&=0x0f;
if(!
x)
address=0x80+y;
else
address=0xc0+y;
LCD1602_write_cmd(address);
}
//****************************************************************
voidLCD1602_write_char(ucharx,uchary,uchardat)
{
LCD1602_set_xy(x,y);
LCD1602_write_data(dat);
}
//*********************************************************************
voidLCD1602_write_string(ucharx,uchary,uchar*s)
{
LCD1602_set_xy(x,y);
while(*s)
{
LCD1602_write_data(*s);
s++;
}
}
voidnum(ucharx,uchary,uintn)
{
uchari,length,a[6]={0,0,0,0,0,0};
uintnx=n;
if(n==0){LCD1602_write_char(x,y,'0');return;}
for(i=0;i<6;i++)
{
if(nx>=1)length++;
nx/=10;
}
nx=n;
for(;length>0;length--)
{
a[length-1]=nx%10+48;
nx/=10;
}
LCD1602_write_string(x,y,a);
}
#endif
/********************XXX.H文件部分**********************/
#ifndefDELAY52_H
#defineDELAY52_H
#defineucharunsignedchar
#defineuintunsignedint
#include
//起始值delayus
(1)=27us,间隔9.9us
voiddelay10us(uintt)
{
while(t--);
}
voiddelayms(uintt)
{
uinti;
ucharj;
for(i=0;ifor(j=0;j<125;j++);
}
#endif
先按上面接口连接,然后即可编译下载,测试~~~~然后在修改成自己的代码。
 升级会员
升级会员 