FX2NPLC试验指导书机械与材料工程学院西安文理学院.docx
《FX2NPLC试验指导书机械与材料工程学院西安文理学院.docx》由会员分享,可在线阅读,更多相关《FX2NPLC试验指导书机械与材料工程学院西安文理学院.docx(15页珍藏版)》请在冰豆网上搜索。
FX2NPLC试验指导书机械与材料工程学院西安文理学院
自动控制原理实验指导书
西安文理学院
物理与机械电子工程学院
目录
实验一典型线性环节的模拟1
实验二二阶系统的阶跃响应5
实验三线性系统稳定性的研究8
实验四二阶系统的频率响应11
实验五控制系统的校正13
实验一典型线性环节的模拟
一、实验目的
1.学习典型线性环节的模拟方法
2.研究阻、容参数对典型环节阶跃响应的影响
二、实验仪器设备
1.TKCC-1型自控原理及计算机控制技术实验平台
2.示波器
3.万用表
三、实验内容
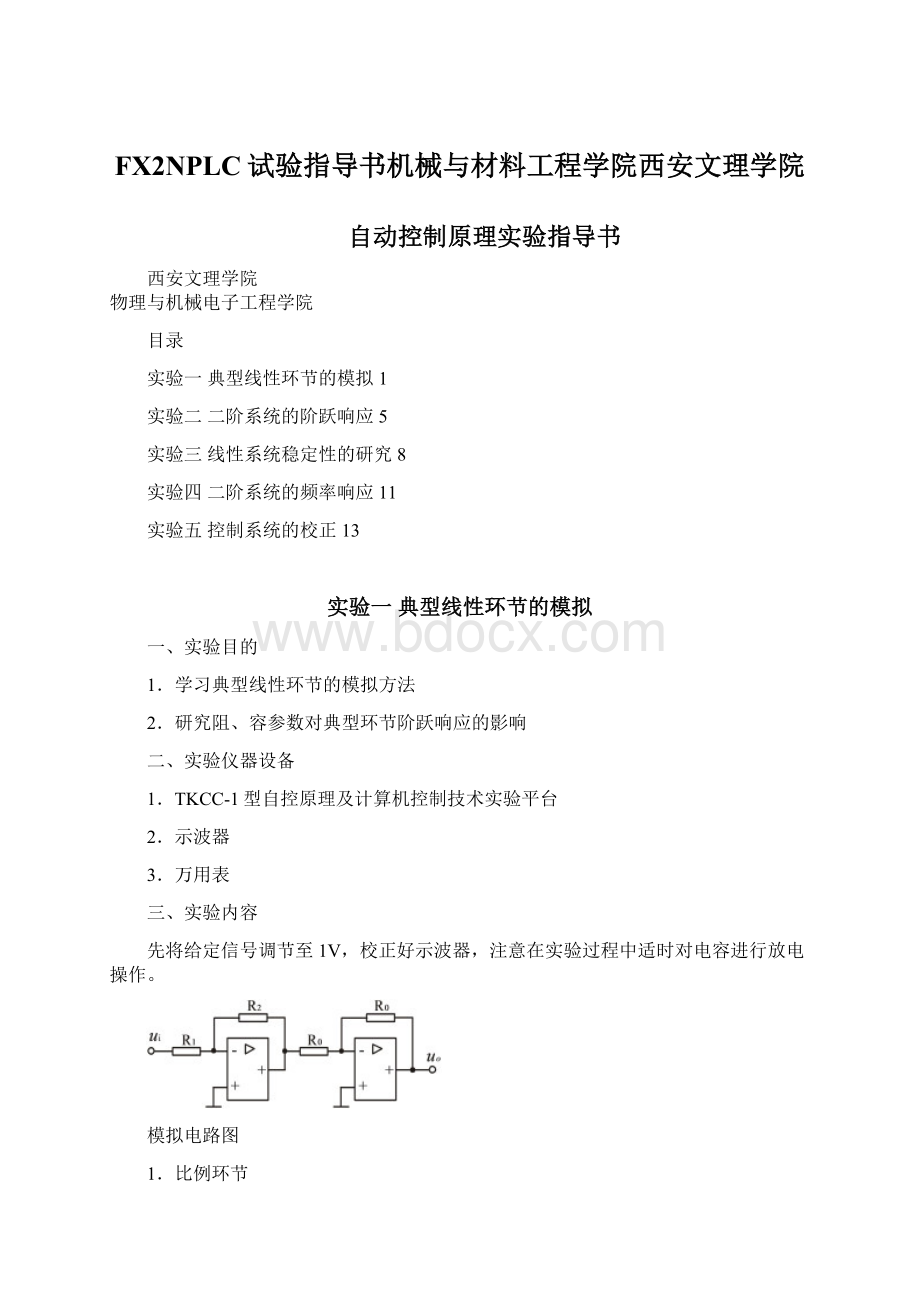
先将给定信号调节至1V,校正好示波器,注意在实验过程中适时对电容进行放电操作。
模拟电路图
1.比例环节
方框图
选择实验台上的通用电路单元(U12、U6)设计并组建相应的模拟电路,图中后一个单元为反相器,其中R0=200K。
若比例系数K=1时,电路中的参数取:
R1=100K,R2=100K。
若比例系数K=2时,电路中的参数取:
R1=100K,R2=200K。
模拟电路图
记录系统的阶跃响应曲线,并与理论值进行比较。
方框图
2.积分环节
选择实验台上的通用电路单元(U12、U6)设计并组建相应的模拟电路,图中后一个单元为反相器,其中R0=200K。
若积分时间常数T=1S时,电路中的参数取:
R=100K,C=10uF(T=RC=100K×10uF=1);
若积分时间常数T=0.1S时,电路中的参数取:
R=100K,C=1uF(T=RC=100K×1uF=0.1);
记录系统的阶跃响应曲线,并与理论值进行比较。
模拟电路图
3.比例积分环节
方框图
选择实验台上的通用电路单元(U12、U6)设计并组建相应的模拟电路,图中后一个单元为反相器,其中R0=200K。
若取比例系数K=1、积分时间常数T=1S时,电路中的参数取:
R1=100K,R2=100K,C=10uF(K=R2/R1=1,T=R2C=100K×10uF=1);
若取比例系数K=1、积分时间常数T=0.1S时,电路中的参数取:
R1=100K,R2=100K,C=1uF(K=R2/R1=1,T=R2C=100K×1uF=0.1S)。
记录系统的阶跃响应曲线,并与理论值进行比较。
模拟电路图
4.比例微分环节
方框图
选择实验台上的通用电路单元(U12、U6)设计并组建相应的模拟电路,图中后一个单元为反相器,其中R0=200K。
若比例系数K=1、微分时间常数T=0.1S时,电路中的参数取:
R1=100K,R2=100K,C=1uF(K=R2/R1=1,T=R1C=100K×1uF=0.1S);
若比例系数K=1、微分时间常数T=1S时,电路中的参数取:
R1=100K,R2=100K,C=10uF(K=R2/R1=1,T=R1C=100K×10uF=1S);
记录系统的阶跃响应曲线,并与理论值进行比较。
模拟电路图
5.一阶惯性环节
方框图
选择实验台上的通用电路单元(U12、U6)设计并组建相应的模拟电路,图中后一个单元为反相器,其中R0=200K。
若比例系数K=1、时间常数T=1S时,电路中的参数取:
R1=100K,R2=100K,C=10uF(K=R2/R1=1,T=R2C=100K×10uF=1)。
若比例系数K=1、时间常数T=0.1S时,电路中的参数取:
R1=100K,R2=100K,C=1uF(K=R2/R1=1,T=R2C=100K×1uF=0.1)。
若比例系数K=0.5、时间常数T=1S时,电路中的参数取:
R1=200K,R2=100K,C=10uF(K=R2/R1=0.5,T=R2C=100K×10uF=1)。
记录系统的阶跃响应曲线,并与理论值进行比较。
6.比例微分环节(选做)
方框图
模拟电路图
选择实验台上的通用电路单元(U12、U6)设计并组建相应的模拟电路,图中后一个单元为反相器,其中R0=200K。
若比例系数K=2、积分时间常数TI=0.1S、微分时间常数TD=0.1S时,电路中的参数取:
R1=100K,R2=100K,C1=1uF、C2=1uF(K=(R1C1+R2C2)/R1C2=2,TI=R1C2=100K×1uF=0.1S,TD=R2C1=100K×1uF=0.1S);
若比例系数K=1.1、积分时间常数TI=1S、微分时间常数TD=0.1S时,电路中的参数取:
R1=100K,R2=100K,C1=1uF、C2=10uF(K=(R1C1+R2C2)/R1C2=1.1,TI=R1C2=100K×10uF=1S,TD=R2C1=100K×1uF=0.1S);
记录系统的阶跃响应曲线,并与理论值进行比较。
四、思考题
1.积分环节和惯性环节主要差别是什么?
在什么条件下,惯性环节可以近似地视为积分环节?
而又在什么条件下,惯性环节可以近似地视为比例环节?
2.在积分环节和惯性环节实验中,如何根据单位阶跃响应曲线的波形,确定积分环节和惯性环节的时间常数?
五、实验报告要求
1.画出各典型环节的实验电路图,并注明参数。
2.写出各典型环节的传递函数。
3.根据测得的典型环节单位阶跃响应曲线,分析参数变化对动态特性的影响。
实验二二阶系统的阶跃响应
一、实验目的
1.学习二阶系统阶跃响应曲线的实验测试方法。
2.研究二阶系统的两个重要参数ζ、ωn对阶跃瞬态响应指标的影响。
二、实验仪器设备
1.TKCC-1型自控原理及计算机控制技术实验平台
2.示波器
3.万用表
三、实验内容
典型二阶系统方框图
其闭环传递函数为:
——阻尼比或衰减系数
ωn——无阻尼自然震荡角频率
模拟电路图(电路参考单元为:
U7、U9、U11、U6)
,
1.先将给定信号调节至1V,校正好示波器,注意在实验过程中适时对电容进行放电操作。
2.依次按照如下参数设定二阶系统,观察其阶跃响应曲线,将结果记录于表一中。
序号
Rx
R
C
ζ
ωn
1
125K
51K
10μ
0.2
2
500K
200K
10μ
0.2
3
250K
100K
10μ
0.2
4
125K
100K
10μ
0.4
5
50K
100K
10μ
1.0
3.分别标出各条曲线的Mp,ts,tp,将曲线①②③进行对比,③④⑤进行对比,将③中的Mp,ts,tp与理论值进行比较。
表一二阶系统的阶跃响应结果
响应曲线
①
Mp=,ts=,tp=
③
④
⑤
Mp=,ts=,tp=
Mp=,ts=,tp=
Mp=,ts=,tp=
②
Mp=,ts=,tp=
四、思考题
1.如果阶跃输入信号的幅值过大,会在实验中产生什么后果?
2.若模拟实验中响应的稳态值不等于阶跃输入函数的幅度,其主要原因可能是什么?
3.在电路模拟系统中,如何实现负反馈和单位负反馈?
五、实验报告要求
1.画出二阶线性定常系统的实验电路,推导模拟电路的闭环传递函数G(s),标明电路中的各参数;
2.根据测得系统的单位阶跃响应曲线,分析开环增益K和时间常数T对系统的动态性能的影响。
实验三线性系统稳定性的研究
一、实验目的
1.研究线性系统的开环比例系数K对稳定性的影响
2.研究线性系统的时间常数T对稳定性影响
二、实验仪器设备
1.TKCC-1型自控原理及计算机控制技术实验平台
2.示波器
3.万用表
三、实验内容
模拟电路图(电路参考单元为:
U7、U9、U13、U11)
三阶系统模拟电路图
三阶系统方框图
先将给定阶跃信号调节至0.5V,校正好示波器,注意在实验过程中适时对电容进行放电操作。
1.求取给定三阶系统的临界开环比例系数Kj1;给定三阶系统如图所示,其中C1=C2=C3=1.0μ;Ri3=200k。
临界开环比例系数Kj的求取方法:
1)先将电位器WR置于最大;
2)加入r(t)=0.5V的阶跃信号;
3)调整WR使系统输出c(t)呈等幅振荡,记录此时的响应曲线c(t);
4)保持WR不变,断开反馈线,维持0.5V输入,测量系统输出电压Uc,
则:
2.系统的开环比例系数K对稳定性的影响,对于前面给定的三阶系统,适当调节WR,观察K增大,K减小时的系统响应曲线。
3.系统中各时间常数的比例系数α对稳定性的影响:
设三阶系统为:
其中:
K=K1K2K3;T=0.2s
;T2=T;T3=αT
各R和C分别取如下参数,使α=1;α=2,α=5。
T2=T
T3=αT
α=1
C1=1μF,R1=200k
C2=1μF,R2=200k
C3=1μF,R3=200k
α=2
C1=1μF,R1=100k
C2=1μF,R2=200k
C3=2μF,R3=200k
α=5
C1=1μF,R1=40k
C2=1μF,R2=200k
C3=10μF,R3=100k
记Kj1,Kj2,Kj3分别为α=1;α=2,α=5时的临界开环比例系数。
依照表一格式,绘制系统的稳定性能图谱。
说明:
1)曲线①~⑥,输入信号0.5V,曲线⑦~⑨,输入信号0.1V;
2)绘制图谱可按照①、③、②、⑤、④、⑥、⑨、⑧、⑦的顺序进行;(⑦可以不做)
3)分别求取Kj1,Kj2,Kj3。
表一系统稳定性能图谱格式
曲线
K=Kj1
K=Kj2
K=Kj3
α=1
①
④
⑦
α=2
②
⑤
⑧
α=5
③
⑥
⑨
四、思考题
三阶系统的各时间常数怎样组合时,系统的稳定性最好?
怎样组合时系统的稳定性最差?
五、实验报告要求
1.画出系统的实验电路,推导模拟电路的闭环传递函数G(s),标明电路中的各参数;
2.计算三种三阶系统的临界开环比例系数Kj及其呈现等幅振荡的自振频率ωj,并将它们与实验结果比较。
实验四二阶系统的频率响应
一、实验目的
1.学习频率特性的实验测试方法;
2.掌握根据频率响应实验结果绘制频率特性的方法。
二、实验仪器设备
1.TKCC-1型自控原理及计算机控制技术实验平台;
2.示波器
3.信号发生器
4.万用表
三、实验内容
典型二阶系统方框图
——阻尼比或衰减系数
ωn——无阻尼自然震荡角频率
其闭环频率响应为:
模拟电路图(电路参考单元为:
U7、U9、U11、U6)
,
1.选定R、C、Rf值,使ωn=10,=0.2;
2.采用信号发生器的正弦波作为系统的输入信号,即r(t)=Asinωt,稳态时系统响应为c(t)=Ysin(ωt+φ);
3.改变输入信号的频率,使角频率分别等于(或接近于)4、6、8、9、10、12、14、16、20、30rad/s,稳态时用双踪示波器同时记录正弦输入r(t)=Asinωt和正弦输出响应c(t)=Ysin(ωt+φ)。
记录曲线序号依次记作⑴,⑵,⑶,……
;
4.按下述表格整理实验数据:
曲线序号
⑴
⑵
⑶
⑷
⑸
⑹
⑺
⑻
⑼
⑽
T(s)
ω(rad/s)
A(ω)
φ(ω)(deg)
5.根据上述表格所整理的实验数据,绘制频率特性,标出Mr和ωr;
6.改变二阶系统的ωn,值,重复上述3.4.5.6步骤。
(选做)
四、思考题
1.在实验中如何选择输入正弦信号的幅值?
2.用示波器测试相频特性时,若把信号发生器的正弦信号送入Y轴,被测系统的输出信号送至X轴,则根据椭圆光点的转动方向,如何确定相位的超前和滞后?
五、实验报告要求
1.写出被测环节和系统的传递函数,并画出相应的模拟电路图;
2.理论计算出不同ω值时的L(ω)和φ(ω),并与实验结果进行比较,绘出被测系统的幅频特性和相频特性。
实验五控制系统的校正
一、实验目的
1.研究校正装置对系统动态性能指标的影响
2.学习校正装置的设计和实现方法
二、实验仪器设备
1.TKCC-1型自控原理及计算机控制技术实验平台
2.示波器
3.万用表
未校正系统
三、实验内容
未校正系统结构框图
相应的模拟电路如图所示。
(电路参考单元为:
U7、U9、U11、U6)
未校正系统开环传递函数
,其中:
,
(
,
)
选择合理参数使得
,在该系统中加入超前校正装置,使系统的相位裕度≥50°,同时保持静态速度误差系数不变。
超前校正装置模拟电路图
超前校正装置参考模拟电路如下图
其传递函数为:
其中:
校正后系统的方框图如下:
实验步骤
1.先将给定阶跃信号调节至1V,校正好示波器,注意在实验过程中适时对电容进行放电操作。
2.调整Rx=250k,R=100k,C=10uF;计算此时未校正系统的静态速度误差系数Kv;
3.画出未校正系统开环传递函数的Bode图,确定其相位裕度和增益裕度;
4.观察并记录未校正系统的闭环阶跃响应曲线①,标出Mp,ts;
5.根据要求计算超前网络的参数Tc1,Tc2,确定相应的R1,R2,C1,C2值,构成所需要的超前校正装置。
6.单独观察并记录超前校正装置的阶跃响应曲线②;
7.将超前校正装置接入该系统中,观察并记录校正后控制系统的阶跃响应曲线③,标出Mp,ts,和曲线①进行比较。
四、思考题
1.模拟电路如下所示。
能否作为超前校正装置?
试计算其传递函数
。
2.若
,能否计算出校正后系统的闭环主导极点及与之对应的ωn,?
五、实验报告要求
1.根据对系统性能的要求,设计系统的串联校正装置,写出超前矫正装置的设计过程,给出校正装置的电路图,并标明参数;
2.记录实验过程中的3条阶跃响应曲线,并标出相应的动态性能指标;
3.画出校正后的系统模拟电路图。
 升级会员
升级会员 