多回路系统.docx
《多回路系统.docx》由会员分享,可在线阅读,更多相关《多回路系统.docx(10页珍藏版)》请在冰豆网上搜索。
多回路系统
第3篇
多回路系统
第6章利用多回路改善控制
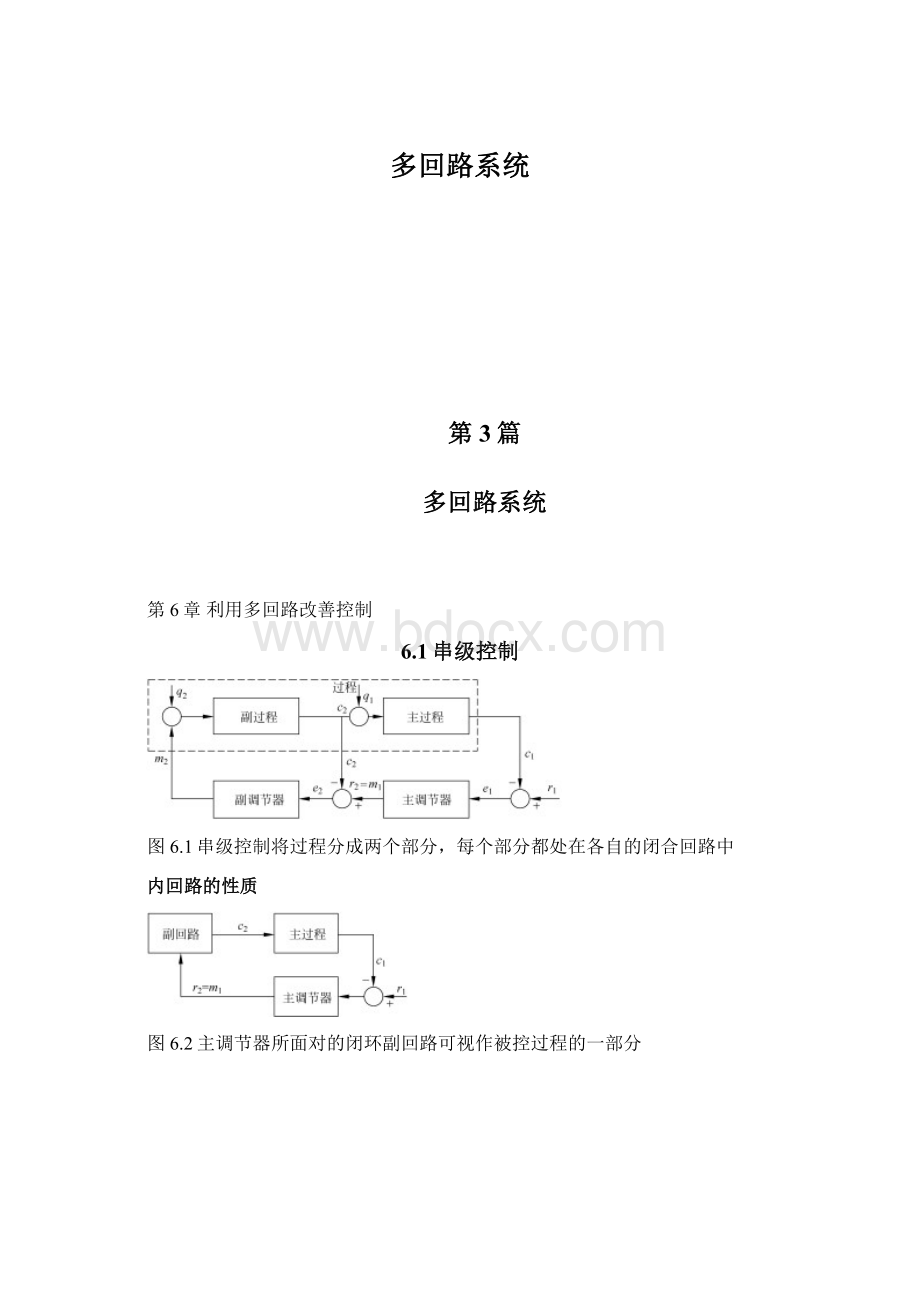
6.1串级控制
图6.1串级控制将过程分成两个部分,每个部分都处在各自的闭合回路中
内回路的性质
图6.2主调节器所面对的闭环副回路可视作被控过程的一部分
图6.3用比例调节器围绕积分过程构成闭环后,会减小它在长周期下的增益和相位滞后
图6.4对于积分过程来说,副调节器若有积分动作,就会出现谐振峰
外部反馈
图6.5利用c2而不用r2作为积分反馈,便可防止主调节器出现积分饱和
图6.6当副回路中出现扰动时,用r2反馈到主调节器可使IE为零,而用c2反馈则能给出较低的IAE值
串级调节器的整定
以阀位作为副回路
图6.7Foxboro公司的P50阀门执行器带阀门定位器后,其增益特性得到显著的改善,但相位特性改善不多
串级流量回路
温度-温度串级系统
图6.8与用冷却液的入口温度构成串级控制(实线)相比,用出口温度构成串级(虚线)是一种显著的改进
6.2多输出控制系统
总输出串级控制
图6.9任一调节量的变化都立刻反馈回去,以便于其他的调节量重新定位
图6.10利用总流量反馈,可以把阀门的非线性从主回路中去掉
变负荷设备与定负荷设备的结合
图6.11当一台设备被启动或关闭后,把一个信号反馈给减法器,使变负荷设备的承荷能力复位
保持阀门尽可能开足
图6.12阀位调节器使阀门的最大开度保持在90%左右,这样泵就能以最低的速
6.3选择性控制回路
图6.13马达转速受输出较低的那个调节器控制
图6.14使用高值选择器以实现
对峰值温度的控制
图6.15高值选择器可以在任一分析仪表发生故障时
防止反应器因反应物过量而遭损坏
防止积分饱和
图6.16选择器的输出用作共同的反馈信号,以防止
用数字算法进行选择
可变结构
图6.17当选中液位调节器来控制回流量时,压力调节器就被切换到放气阀上
6.4适应性控制系统
动态适应性系统
程序适应性控制
自整定调节器
图6.18EXACT调节器可观测出峰1、峰2和峰3的偏差及峰-峰之间的时间,以此可以估计出响应周期、衰减比和超调量
图6.19如果回路响应的衰减比较合适,则高、低频分量应以一定的比值出现
图6.20当回路出现振荡时,适应性调节器会自动增加低增益区的宽度;当回路反应迟钝时,它又会自动减小低增益区的宽度
自整定调节器的局限性
静态适应性问题
自寻最优调节器
图6.21需要用一个过程动态响应模型确定分子和分母的相位
6.5小结
参考文献
1.Shinskey,F.G.,“FlowandPressureControlUsingVariableSpeedMotors,”Proc.SecondControlEng.Conference,Chicago,May1982.
2.Shinskey,F.G.,“ProcessControlSystemswithVariableStructure,”ControlEng.,August1974.
3.Kraus,T.W.,andT.J.Myron,“SelftuningPIDControllerUsesPatternRecognitionApproach,”ControlEng.,June1984.
4.Andreiev,N.,“ANewDimension:
ASelftuningControllerThatContinuallyOptimizesPIDConstants,”ControlEng.,August1981.
5.Fjeld,M.,andR.G.Wilhelm,Jr.,“SelftuningRegulators—TheSoftwareWay,”ControlEng.,October1981.
6.Versteeg,H.J.,H.J.Jansma,andK.Turner,“EvaluationofCommerciallyAvailableAdaptiveControllers,”J.A,vol.27,no.3,1986.
7.Akesson,I.,“PracticalExperienceswithAdaptiveControlofDistillationColumns,”J.A,vol.27,no.3,1986.
8.Shinskey,F.G.,“AdaptivepHControllerMonitorsNonlinearProcess,”ControlEng.,February1974.
9.Shinskey,F.G.,“AdaptiveNonlinearControlSystem,”U.S.Patent3,794,817,February26,1974.
10.Jutila,P.,andP.Jaakola,“TestswithFiveAdaptivepHcontrolMethodsinLaboratory,”HelsinkiUniv.ofTech.,ControlEng.Lab.,Report65,June1986.
11.Gordon,L.M.,“SimpleOptimizationforDualCompositionControl,”HydrocarbonProc.,June1986.
习题
6.1当主调节器以副回路的测量值进行反馈时,其最佳比例带和积分时间为什么比以主调节器自己的输出进行反馈时所对应的参数整定值要低?
主回路扰动引起的IAE值为什么不按比例减小?
6.2一个阀门执行器的动态特性如图6.7所示,试估算它的滞环大小。
6.3只要贮罐内的液位保持在一定的界限之内,从贮罐流出的液体流量就可以控制在固定的数值上。
试设计一个控制系统,在照顾到液位高低限的同时,要求能控制好它的输出流量。
6.4对于图2.7和图2.8所示的热交换器,在用有相互作用的PID调节器的控制下,当流量为50%时,按表4.4对调节器进行最佳整定。
问流量为多大时,回路增益可达到1.0?
6.5在一个pH控制回路中,pH电极会逐渐被沉淀物所玷污,有人建议用自整定调节器作为维持控制回路稳定的手段,你认为这是一种好的解决办法吗?
还有其他更好的方法吗?
 升级会员
升级会员 