步进电机细分驱动1.docx
《步进电机细分驱动1.docx》由会员分享,可在线阅读,更多相关《步进电机细分驱动1.docx(8页珍藏版)》请在冰豆网上搜索。
步进电机细分驱动1
4步进电机细分驱动
4.1步进电机的分类[31]
步进电机最早是在1920年代由英国人所开发。
1950年代后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。
往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中。
在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。
步进电机依其构造上的差异可分为三大类:
(1)可变磁阻式(VR型):
转子以软铁加工成齿状,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳,但其容许负荷惯性并不大。
其步进角通常为15°。
(2)永久磁铁式(PM型):
转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩。
依转子材质区分,其步进角有45°、90°及7.5°、11.25°、15°、18°等几种。
(3)混和式(HB型):
转子由轴向磁化的磁铁制成,磁极做成复极的形式,其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小。
目前市场上所使用的工业用步进电机,以混和式(HB型)最为普遍。
4.2步进电机工作原理
(a)(b)(c)
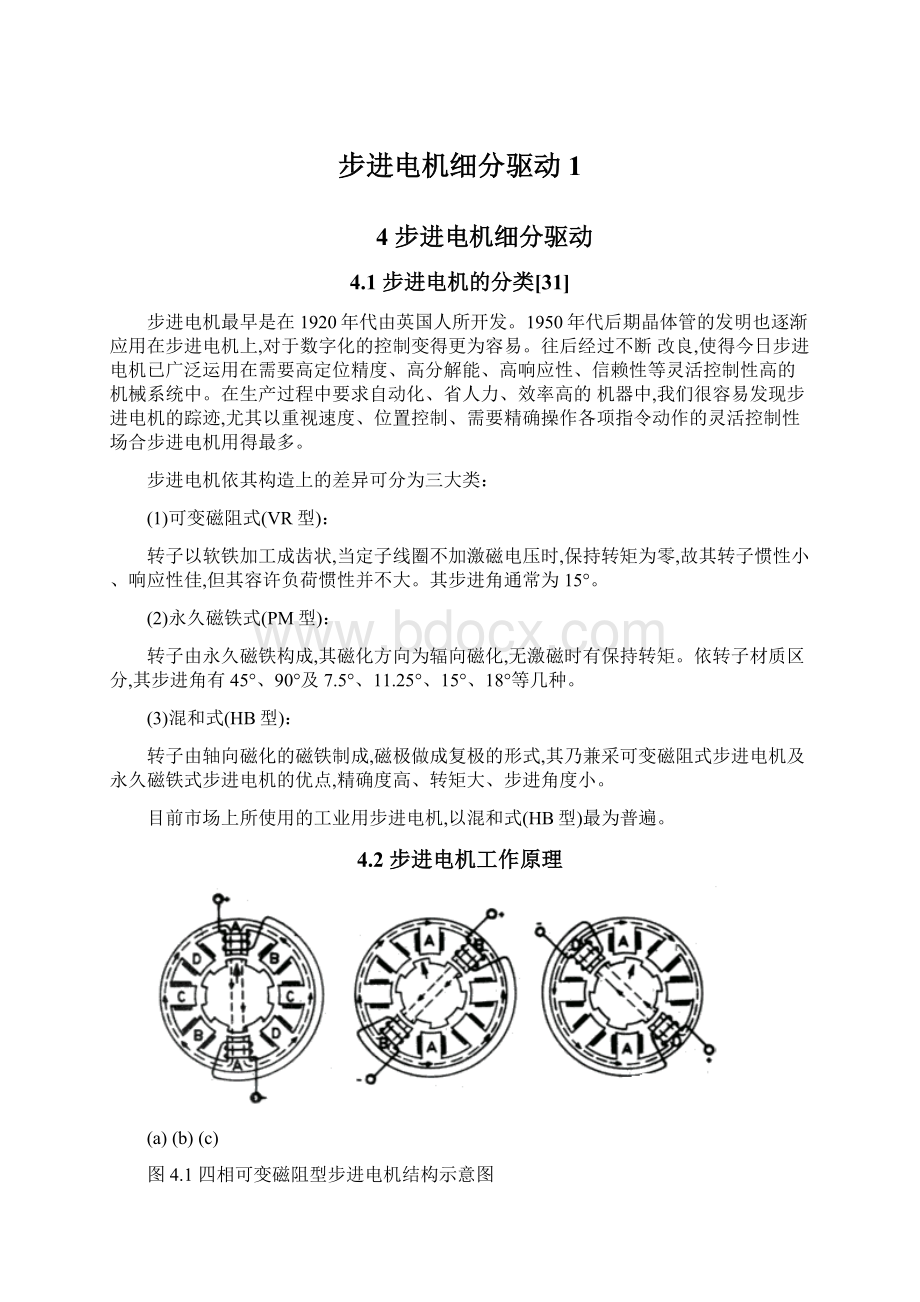
图4.1四相可变磁阻型步进电机结构示意图
图4.1是四相可变磁阻式步进电机结构示意图。
这种电机定子上有八个凸齿,每一个齿上有一个线圈。
线圈绕组的连接方式,是对称齿上的两个线圈进行反相连接,如图中所示。
八个齿构成四对,所以称为四相步进电机。
它的工作过程是这样的:
当有一相绕组被激励时,磁通从正相齿,经过软铁芯的转子,并以最短的路径流向负相齿,而其他六个凸齿并无磁通。
为使磁通路径最短,在磁场力的作用下,转子被强迫移动,使最近的一对齿与被激励的一相对准。
在图4.1(a)中A相是被激励,转子上大箭头所指向的那个齿,与正向的A齿对准。
从这个位置再对B相进行激励,如图4.1中的(b),转子向反时针转。
若是D相被激励,如图4.1中的(c),则转子为顺时针转。
我们不难算出两种情况下转过的度数为转子与定子齿距差:
(4.1)
因此单向激励有两种可能性:
A—B—C—D或A—D—C—B。
一种为反时针转动;另一种为顺时针转动。
但每步都使转子转动15°。
而四相被激励一遍后,转子转过的角度是一个转子的齿距-60°。
它们之间的相互关系,可由下式计算:
(4.2)
式中:
θS为步长;P为相数;N为转子齿数。
故对图4.1中的步进电动机来说,步长为15°,表示电机转一圈需要24步。
其他两种步进电动机的工作原理基本相同,只是结构不同而已。
4.3步进电机细分驱动的工作原理
步进电机的驱动是靠给步进电机的各相励磁绕组通以电流,实现步进电机内部磁场合成方向的变化来使步进电机转动的。
如果设矢量TA、TB、TC、TD为步进电机A、B、C、D四相励磁绕组分别通电时产生的磁场矢量;TAB、TBC、TCD、TDA是步进电机AB、BC、CD、DA两相同时通电时产生的磁场矢量。
根据步进电机的工作原理可见,磁场的旋转导致了转子的转动。
磁场旋转一周,转子转过一个转子齿距。
那么根据通电方式的不同,步进电机的运行方式主要有以下几种:
(1)单四拍:
TA-TB-TC-TD-TA或TA-TD-TC-TB-TA;
(2)双四拍:
TAB-TBC-TCD-TDA-TAB或TAD-TDC-TCB-TBA-TAD
(3)四相八拍:
TA-TAB-TB-TBC-TC-TCD-TD-TDA-TA
TA-TAD-TD-TDC-TC-TCB-TB-TBA-TA
四相八拍的工作方式相对于单四拍而言,实现了二细分。
但是如果想要进一步的到更小的步进角。
就必须从步进电机的原理上来考虑。
如果能在磁场矢量TA和TAB之间插入多个稳定的磁场矢量,这样步进电机的步进角就会进一步变小。
具体实现的方法,实际就是控制A相和B相的励磁电流变化即可。
具体的细分方法主要有:
(1)“一相绕组电流线性变化”的细分驱动方法,见图4.2
由图可见,保持TA不变,使B相的电流线性增加,这样就在TA和TAB之间插入了四个稳定合成磁场矢量。
而保持TB不变,A相的电流线性减少这样就在TAB和TB之间插入了四个稳定的合成磁场矢量。
如果想进一步细分可以通过控制相电流的步进值来实现。
这就是“一相绕组电流线性变化”的细分驱动原理。
此种方法的优点是控制电路结构简单、实现容易。
缺点是磁场矢量的幅值在不断变化,并且步进角不是均匀变化的,降低了步进电机的线性定位精度,限制了步进电机在精度要求较高的场合的运用。
图4.2一相绕组电流线性变化”细分驱动原理图
(2)“电流矢量恒幅均匀细分旋转”的细分驱动方法,见图4.3
针对“一相绕组电流线性变化”的细分驱动方法的缺点,我们设想可以同时控制两相电流的大小,使得合成磁场矢量的大小不变,这同时又可以得到了相等步进角。
进一步提高步进电机的步进性能。
这个算法在SOPC上的实现就是本论文所要解决的主要问题。
基本思路就是使得A相的电流按余弦规律变化,B相的电流按正弦规律变化。
图4.3电流矢量恒幅均匀细分旋转”细分驱动原理图
5系统的硬件设计与实现
5.1输出正、余弦电流的解决思路
目前最常用的步进电机细分驱动思想有斩波式和脉宽调制式(PWM,PulseEidthModulation)两种。
斩波式一般就是通过对比电机绕组中的电流和控制电压,来控制功放管的通断。
这样,输出不同的控制电压绕组中就流过不同的电流值。
而脉宽调制式细分驱动思想是通过对绕组输入不同脉冲宽度的矩形波,改变输出到电机绕组上的平均电流。
后者的特点是控制精度高、工作频率稳定。
在此,我们考虑选用第二种思路,PWM控制思想。
考虑电机绕组是电感性负载,理想情况下,电机线圈中的电流其实就是对PWM波形的积分,亦即电流的大小和PWM波形的面积成正比。
而我们主要想得到的电流波形为:
(5.1)
(5.2)
如果系统采用单极性的PWM波形,波形的幅值固定,那么想得到一路正弦波形和一路余弦波形,我们只要控制PWM脉冲的宽度按照正弦规律和余弦规律变化即可。
5.2输出正、余弦电流的实现方法
5.2.1基于Avalon总线的PWM可编程组件
PWM波形的生成主要是控制波形的占空比。
具体在控制步进电机的时候,需要相应的驱动放大电路来提高驱动能力。
图5.1是PWM组件的原理框图(其VHDL源程序见附录C)。
图5.1PWM组件原理框图
PWM组件包含三个32位的寄存器:
周期寄存器、占空比寄存器和控制寄存器。
PWM波形的频率由周期寄存器的值和时钟频率决定。
具体关系见公式5.3。
占空比寄存器的值决定了PWM高电平的宽度。
控制寄存器只有最后一位是有效的,它控制PWM组件是否工作
(0:
停止工作;1:
开始工作)。
(5.3)
fPWM:
PWM波形的频率;fclk:
PWM组件的工作时钟频率;CR:
周期寄存器值。
PWM组件的核心就是一个32位的计数器。
具体工作过程为:
计数器值小于周期寄存器值则继续计数,否则清零;计数器值如果小于占空比寄存器值则pwm_out2输出高电平,反之输出低电平;控制寄存器为“1”计数器开始计数,否则计数器清零。
5.3系统硬件实现
5.3.1NiosII软核配置框图
图5.2步进电机细分驱动NiosII软核配置框图
图5.2中各个模块的小括弧内标出的是所使用的IP核名称。
该硬件系统是利用QuartusII6.1和MegaCoreIPLibrary6.1完成的。
对应的在SOPCBuilder中进行配置完成后的界面如图5.3所示。
系统使用的康芯公司的GW-SOPC实验箱,因此在进行系统设计之前,我们需要把该实验箱的一些组件说明文件放入到工程文件目录中和NiosIIIDE的安装目录下的components文件夹下。
这样我们才可以在SOPCBuilder的目标板的下拉列表中选中“GWSOPCNiosIIDevelopmentKit
(EP1C6)”,外部时钟选择“100MHz”;并且在左面AvalonComponents的目录下出现“GW_SOPC”这一子目录,这个子目录下面是康芯系统实验板所使用的存储器接口的IP核。
图5.3SOPCBuilder中NiosII软核配置示意图
系统各模块的说明:
(1)NiosIICPU:
使用的是AvalonComponents\NiosIIProcessorAlteraCorporation内核。
对应图5.3中的cpu。
属性设置:
NiosII核选择“NiosII/s”;JTAG调试模式选择为“level3”;其余默认。
(2)键盘输入模块:
使用的是AvalonComponents\Other\PIO(ParallelI/O)核,对应图5.3中的key_in,属性设置为8位输入。
(3)8位数码管输出模块:
使用的是AvalonComponents\Other\PIO(ParallelI/O)核,对应图5.3中的led_out,属性设置为32位输出。
(4)PWM输出控制模块:
使用的是AvalonComponents\Other\PIO(ParallelI/O)核,对应图5.3中的pha_change_con,属性设置为2位输出。
由于系统主要是针对四相步进电机设计的,而进行细分的时候,我们只需要对其中的两相输出正弦和余弦波形,故
需要针对当前的状态输出控制信号来确定两路波形送入哪两相。
(5)8位发光二极管输出:
使用的是AvalonComponents\Other\PIO(ParallelI/O)核,对应图5.3中的light_out,属性设置为8位输出。
(6)系统定时器:
使用的是AvalonComponents\Other\intervaltimer核,对应图5.3中的sys_tim_clk,属性设置默认。
此定时器可用于此后在上运行的C程序中的某些软件函数进行速度定时。
(7)JTAG调试接口模块:
使用的是AvalonComponents\Communication\JTAGUART核,对应图5.3中的jtag_uart,属性设置默认。
(8)AvalonTristateBridge模块:
使用的是AvalonComponents\Bridge\AvalonTristateBridge核,对应图5.3中的ext_mem,属性设置默认。
NiosIICPU与SRAM、SDRAM、Flash、自定制组件相接都需要Avalon三态总线桥。
(9)EPCS控制器模块:
使用的是AvalonComponents\Memory\EPCASerialFlashController核,对应图5.3中的epcs_controller,属性设置默认。
EPCSSerialFlashController可用于NiosII处理器对EPCSFlash存储器的读写访问,可以通过此控制器将SOF文件和CPU运行的软件一并存于EPCS器件中,以便大大简化硬件系统组成结构。
(10)外部RAM接口控制器模块:
使用的是AvalonComponents\GW_SOPC\CY7C1
(11)041SRAM(GWSOPC)核,对应图5.3中的ext_ram,属性设置为1024K。
(12)外部Flash存储器接口模块:
AvalonComponents\Memory\FlashMemmory(CommonFlashInterface)核,对应图5.3中的ext_flash,属性设置为地址宽度23位,数据宽度8位。
(13)PWM自定义组件模块:
添加两个,目录AvalonComponents\UnknownGroup\PWM_VHDL。
NiosII软核以及相应的外设配置完成之后进行系统中断和地址的分配。
设定复位、执行和中断地址如图5.4所示后,进行系统硬件的生成。
生成完毕之后添加到顶层的原理图文件中。
图5.4系统复位、执行和中断地址设定
(注:
可编辑下载,若有不当之处,请指正,谢谢!
)
 升级会员
升级会员 