控制系统仿真设计.docx
《控制系统仿真设计.docx》由会员分享,可在线阅读,更多相关《控制系统仿真设计.docx(8页珍藏版)》请在冰豆网上搜索。
控制系统仿真设计
课程设计任务书
课程设计题目
控制系统仿真设计
功能
技术指标
使得电动车控制系统的系统在校正后阶跃响应的超调量小于5%,调节时间小于4s。
工作量
二周
工作计划
第一周学习如何使用MATLAB软件与控制系统的仿真等,第二周选择课题然后进行分组查询资料,最后借助软件对实验题目进行编程矫正和分析,使实验达到题目要求的最优化效果。
指导教师评语
第1章设计题目及要求
1.1设计题目:
若系统的数学模型及控制环节的传递函数为G(s)=40/(s(s+3)(s+6)),设计校正装置。
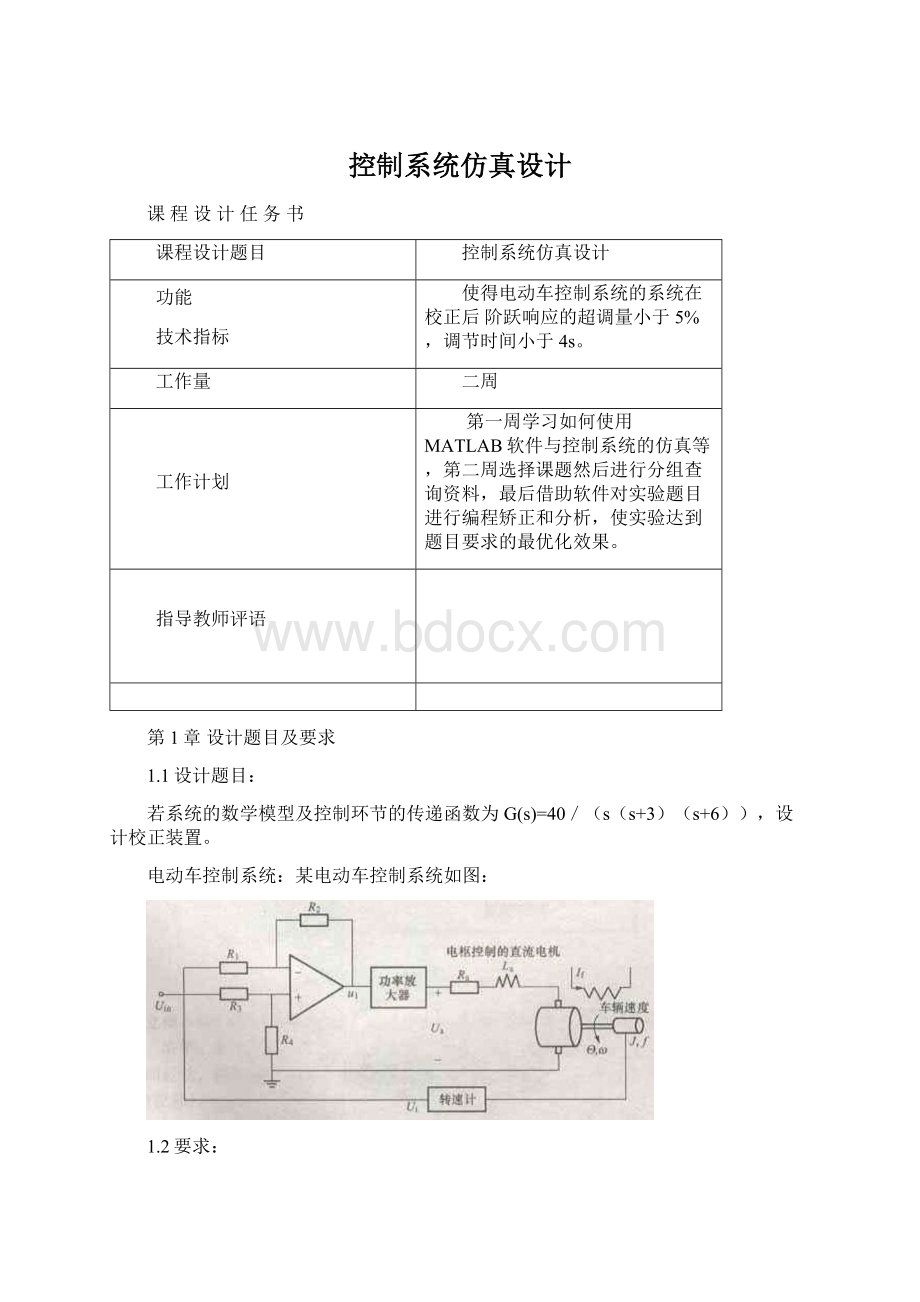
电动车控制系统:
某电动车控制系统如图:
1.2要求:
系统在阶跃响应的超调量小于5%,调节时间小于4s。
第2章校正前系统性能
2.1时域性能
(1)、绘制未加入校正装置的系统开环阶跃响应曲线,根据系统的开环传递函数,程序如下:
function[Tp,Mp,Tr,Ts]=stepa(G)
[Y,t]=step(G);
cs=length(t);
yss=Y(cs);
[ctp,tp]=max(Y);
Tp=t(tp);
Mp=100*(ctp-yss)/yss
k=cs+1;
n=0;
whilen==0
k=k-1;
ifY(k)<0.98*yss
n=1;
end
end
t1=t(k);
k=cs+1;
n=0;
whilen==0
k=k-1;
ifY(k)>1.02*yss
n=1;
end
end
t2=t(k);
ift1>t2
Ts=t1;
else
Ts=t2;
End
clearall;
clearall;
num=2.2;
den=conv([1,0],conv([0.3,1],[0.17,1]));
sys1=tf(num,den);
sys2=feedback(sys1,1);
figure
(1);
margin(sys1)
figure
(2);
step(sys2)
[Tp,Mp,Tr,Ts]=stepa(sys2)
Mp=
25.8043
Tp=
1.5355
Mp=
25.8043
Tr=
1.0631
Ts=
4.6066
系统的阶跃响应曲线图2-1
2.2频域性能
由2.1节的程序可以得到系统的频域曲线图(2-2)如下所示
控制系统的频域响应曲线图2-2
MATLAB运行结果
开环传递函数为:
G(s)=2.2/(s(0.3s+1)(0.17s+1))
Mp=25.8043Tp=1.5355
Mp=25.8043Tr=1.0631Ts=4.6066
系统是稳定的,但是响应时间和超调量都较之题目要求大
第3章校正环节设计
3.1校正方法选择
由于题目要求系统阶跃响应的超调量小于5%,超调时间小于4s,系统虽然稳定,但是响应时间较快和超调量较大,由于放大系数K对超调量有影响,为此需要改变放大系数K的值来满足题目要求的预期值,根据系统的时域性能和频域性能可知适合采用比例-微分控制器(PD控制器)从比例环节和微分环节进行校正,从物理的角度来分析,他可以降低系统的最大超调量,改变动态性能,从频率特性的角度来说,它可以增加系统的相角裕量,是系统的震荡减弱。
校正环节的两个转折频率设置在远离校正后系统剪切频率的低频段,利用之后网路的高频幅值衰减特性,使校正后系统中频段的幅频将衰减|20lgb|dB,而其相频可认为不衰减,因此校正后系统的剪切频率将减小,在新的剪切频率出获得较大的相角裕量,增加了稳定性和高频抗干扰的能力。
3.2控制参数整定
由3.1节的分析可得要调节到预期要求,可通过调节比例系数K和微分系数yss来改变系统的性能,利用MATLAB软件对选择合理参数进行逐次修改程序观察校验数据和结果,最终选择了比例系数K=3和微分控制系数为1.02,这样满足了系统的目标要求参数的选定。
第4章校正后系统性能
4.1时域性能
通过校正方法的选择和控制参数的整定,校正后的程序如下所示:
clearall;
num=3;
den=conv([1,0],[0.17,1]);
sys1=tf(num,den);
sys2=feedback(sys1,1);
figure
(1);
margin(sys1)
figure
(2);
step(sys2)
[Tp,Mp,Tr,Ts]=stepa(sys2)
利用MATLAB校正后的运行结果为:
Mp=
4.7875
Tp=
1.0513
Mp=
4.7875
Tr=
0.7885
Ts=
1.4455
满足了Mp=4.7875<5%,Ts=1.4455<4s,其阶跃响应曲线和频域响应曲线为下图所示。
校正后系统的阶跃响应曲线4-1
4.2频域性能
校正后系统的频域曲线如图(4-2)所示,满足题目要求
校正后系统的频域响应曲线4-2
结论
我组做的电动车控制系统的超调矫正调节模型,利用MATLAB软件画出系统阶跃响应的时域图和bode图,通过实验验证我增加了PD控制环节,并得到了以下结论,如果系统稳定且仅需改变系统的超调量和超调时间,根据三种调节类型和调节特点,需要增加PD控制调节模型来满足系统的稳态需求,通过实验在软件上选择合理的参数进行逐次校验,观察Mp、Tp、Tr和Ts,以及校正的阶跃响应曲线和频域响应曲线,直到满足题目要求为止。
在满足题目要求的基础上进行校正,纠正的过程和步骤必须根据实际需求,不可死板一成不变,选定参数合理的利用MATLAB软件,M-file文件进行调试程序,最后确定Mp和Ts达到最优控制,确定了最后的系统传递函数,在一定的范围内满足了性能指标的范围。
心得体会
通过这次对控制系统的滞后校正的设计与分析,让我对PD校正环节有了更清晰的认识,加深了对课本的理解,对期末考试也起到了积极的复习作用,而且让我更进一步熟悉了相关MALAB软件的基本编程方法和使用方法。
在这次的课程设计的过程中,从整体思路的构建到具体每一步的实现,过程并不是一帆风顺的,通过复习课本知识和查阅相关资料确定了整体思路,然后通过演算计算出K值确定校正网络参数,最后运用MATLAB软件编程验证、作图。
在word编辑和运用MATLAB软件使用时遇到了一些问题,通过网络查询和询问同学也都得到了解决,提高了对课设软件的应用能力。
本次课程设计的核心是MATLAB软件的使用,通过软件编程,我对MATLAB的语言和应用又更近一步的了解,特别熟悉了一些对自动控制的使用命令,如跟轨迹绘制函数rlocus()、时域图step()、伯德图函数绘制bode()等。
利用MATLAB对控制系统进行频域分析,大大简化了计算机和绘图步骤,是一款很实用的软件,今后利用课余时间也可以拓展一下自己在MATLAB软件编程的能力。
这次课程设计完成后,我体会了学习自动控制原理,不仅要掌握书本上的内容,还要灵活思考,善于变换,在提出问题、分析问题、解决问题的过程中不断提高自己分析和解决实际问题的能力。
要把理论知识与实践结合起来,从而提高自己的实际动手能力和独立思考的能力。
【本文档内容可以自由复制内容或自由编辑修改内容期待你的好评和关注,我们将会做得更好】
感谢您的支持与配合,我们会努力把内容做得更好!
 升级会员
升级会员 