本项目采购需求.docx
《本项目采购需求.docx》由会员分享,可在线阅读,更多相关《本项目采购需求.docx(24页珍藏版)》请在冰豆网上搜索。
本项目采购需求
本项目采购需求
品目
规格型号
(配置标准)
数量
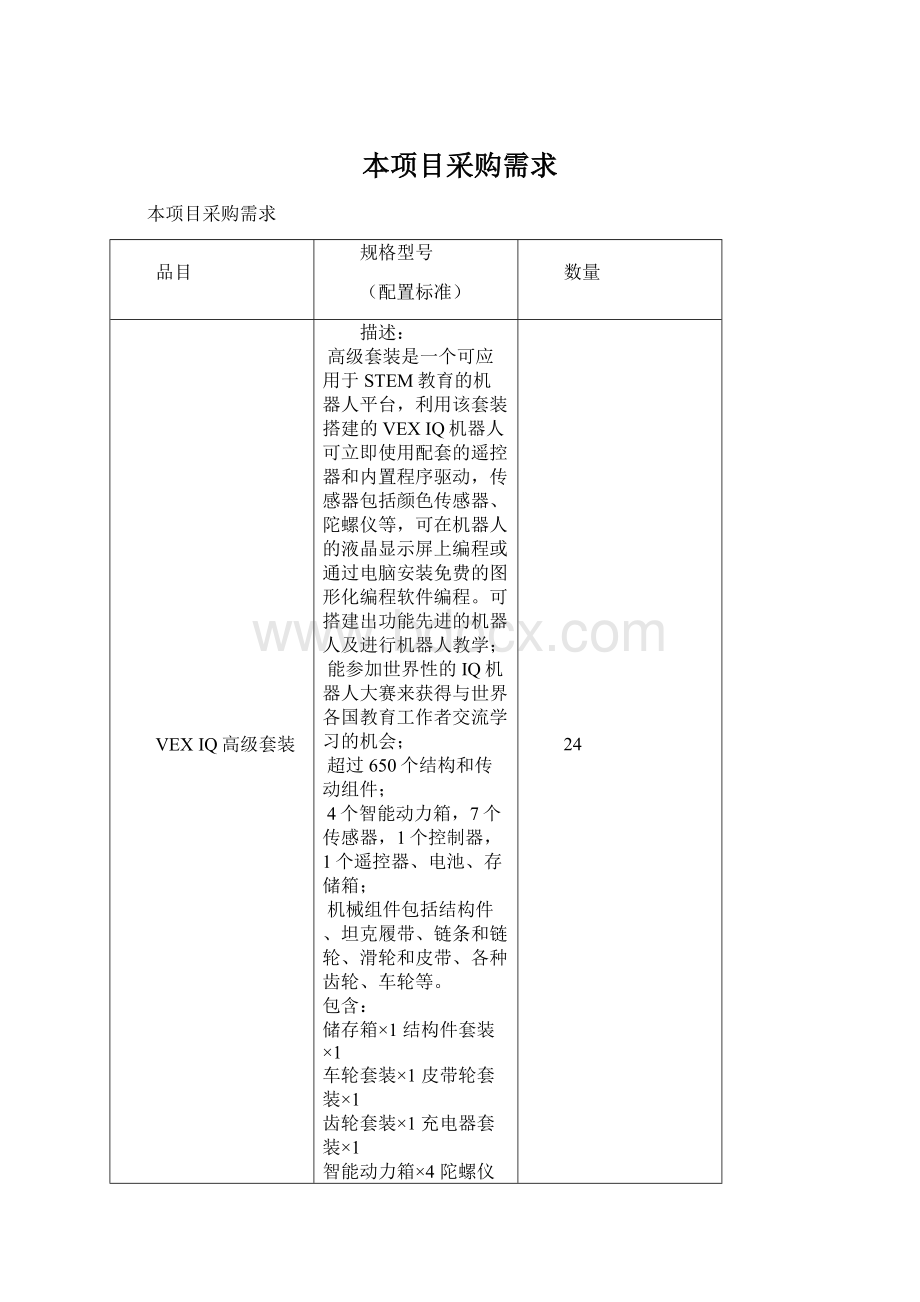
VEXIQ高级套装
描述:
高级套装是一个可应用于STEM教育的机器人平台,利用该套装搭建的VEXIQ机器人可立即使用配套的遥控器和内置程序驱动,传感器包括颜色传感器、陀螺仪等,可在机器人的液晶显示屏上编程或通过电脑安装免费的图形化编程软件编程。
可搭建出功能先进的机器人及进行机器人教学;
能参加世界性的IQ机器人大赛来获得与世界各国教育工作者交流学习的机会;
超过650个结构和传动组件;
4个智能动力箱,7个传感器,1个控制器,1个遥控器、电池、存储箱;
机械组件包括结构件、坦克履带、链条和链轮、滑轮和皮带、各种齿轮、车轮等。
包含:
储存箱×1结构件套装×1
车轮套装×1皮带轮套装×1
齿轮套装×1充电器套装×1
智能动力箱×4陀螺仪传感器×1
碰撞开关×2水晶头连接线×1
触摸式LED×2IQ机器人控制器×1
USB连接线×1IQ机器人遥控器×1
连接件套装×1机器人电池套装×1
距离传感器×1遥控器电池套装×1
颜色传感器×1900MHz无线模块×2
连接线套装×2
套装必须为能参加中国科协举办的中国青少年机器人竞赛,WRC-Robocom机器人竞赛,提供赛事准入厂家的赛事准入证明和厂家授权书。
"
24
VEXIQ结构件套装
描述:
VEXIQ机器人结构件的集合套装,能拓展你的思维及实现更加复杂的机器人创意,能应用于更多的机器人课程的创新教学;
包含超过1000个的VEXIQ组件;
包括结构和运动组件;
包括储存箱。
包含:
储存箱×1基本结构件×1
连接件×1连接件零件包×1
运动件×1皮带轮零件包×1
转盘零件包×1附加基础配件包×1
6
VEXIQ教材
VEXIQ机器人专用教材,每套含3本书,清华大学出版社,
24
机器人配件包
配件包是用于专门组件机器人的配件,包括各种常用的配件,比如:
履带轮×2,链轮×2,
万向轮×3,竞赛长轴套装×1,4格宽板扩展套装×1,2格宽版扩展套装×1,
大基板套装×1,连接销套装×2。
配件包搭配高级套装、结构件套装搭建成的机器人可以参加山东省电教馆组织的山东省中小学电脑制作活动摩天高楼、狂飙、急速过渡比赛,山东省科协组织的山东省机器人大赛中排球、狂飙投篮项目等。
9
竞赛场地地板
2017—2018德州市赛特色项目推箱子竞赛场地地板
3
智能开源机械臂
让简单的机械臂综合多种功能,替代创客类大型工具的功能;结合课程项目案例,掌握3D建模、图形化编程、软甲控制等多方面知识与技能。
教育功能:
3D打印、激光雕刻、物体搬运、遥控控制等,结合3D打印软件、图形化编程软件实现机器人多种不同功能实现,实现“一机多学科学习”的目的
《山东省智能技术应用大赛》竞赛套装
机械臂参数
1、机械臂主体1套:
a、轴数4
b、负载500g
c、最大伸展距离320mm
d、重复定位精度0.2mm
e、通信接口USB/WIFI/Bluetooth
f、电源电压100V-240V,50/60Hz
g、电源输入12V/7ADC
h、功耗60WMax
i、工作温度-10℃-60℃
k、净重4kg
l、底座尺寸158mm×158mm
j、材料6061铝合金,ABS工程塑料
k、轴运动参数:
轴1底座:
工作范围-135°到+135°,最大速度320°/s
轴2大臂:
工作范围0°到+85°,最大速度320°/s
轴3小臂:
工作范围-10°到+95°,最大速度320°/s
轴4旋转:
工作范围+90°到-90°,最大速度480°/s
2、3D打印头1个:
3、耗材类型:
PLA
4、打印尺寸(长×宽×高):
150mm×150mm×150mm
5、DobotStudio软件1套
6、耗材数量若干
7、挤料机1台:
电压:
7.8V电流:
1.5A步距角:
1.8°相数:
2电阻:
5.2欧姆电感:
9.0mH静力矩:
4.0Kg*cm定位力矩:
150g*cm绝缘电阻:
500VDC100欧姆重量0.24Kg
8、连线2根
机械臂主体*1
吸盘套件*1
气汞盒*1
手爪套件*1
写字套件*1
3D打印套件*1
激光雕刻套件*1
WiFi模块*1
蓝牙模块*1
手柄套件*1
Dobotstudio软件*1
课程1套*1
3
物联网教育套装
设备需包含:
物联网连接器:
5套;学习套件:
10套;增强套件-1247A:
5套;无线路由器E200G1:
1台;平板电脑TP-M10:
5台;收纳盒:
5个。
产品描述:
基于开源硬件及软件,作为创客教育、STEAM教育的编程学习平台,集图形化代码编程软件、智能积木、电子一体化的学习套装。
包含控制板、扩展板及传感器,支持Arduino开源硬件。
图形化代码编程软件属于开源软件,支持Arduino开源硬件。
支持至少40种(含)以上以积木拼装的模型,同时包含机械传动类、飞行类、行车类、创意类、生物类、工具类等拼装模型。
支持通过Micro-USB有线连接;通过2.4G无线或者WIFI5g频段以及蓝牙等通讯方式,用平板透过云端控制
产品组成:
1、物联网学习器。
不低于以下配置要求:
储存容量≥16GB;扩展槽MicroSDcard(Max128GB);I/O端口≥1xHDMIoutputterminal;1xMicroUSBport(powersupplyterminal);1xUSB3.0port;网络/无线需要具备802.11a/b/g/nWirelessLAN;Bluetooth4.0+HS;额定输入电流5V、3A;电源适配器输入100一240V、50一60Hz、0.6A输出5V、3A;支持LinuxOS;
体积不大于108mm*44mm*13mm
2、ArduinoLeonardo控制板。
不低于以下配置要求:
具备一个开源码的单芯片控制板,内核等同或优于ATmega328
支持多样的互动程序开发工具
支持使用市售9V电池、1.5V串联电池、充电宝、MicroUSB、电源适配器等设备供电
支持超过17种(含)以上如温度、光感、红外线、风扇等输入和输出两大类型的传感器或输出组件,计划支持60+传感器或输出组件
不低于以下配置要求:
工作电压:
5V;限制输入电压范围:
7V–20V;数字I/O引脚:
20;PWM通道:
7;模拟输入通道:
12;每个I/O直流输出能力:
40mA;3.3V端口输出能力50mA;Flash:
32KB;SRAM:
2.5KB;EEPROM:
1KB;时钟速度:
16MHz。
3、扩充板。
不低于以下配置要求:
具备多种接口,最多可插入16种不同的控制组件与感应组件,至少一个UART口
支持Arduino开源控制板相关规格参数
使用9V电池、1.5V串联电池供电时可与控制板同时叠加供电
不低于以下配置要求:
工作电压:
5V;数字I/O引脚:
20;PWM通道:
7;模拟输入通道:
12;每个I/O直流输出能力:
40mA;3.3V端口输出能力;拥有8个3针脚接口,2个4针脚接口,2个2针脚接口。
4、LED灯组。
不低于以下配置要求:
是一个微控制器板,可用于教GPIO接口。
由上下两块小板组成,上板具备LED功能,下板为GPIO功能。
上板内含白光LED与可分别控制RGB3种色光的RGBLED。
支持使用引脚来控制模块,如伺服,以构建小型IOT项目,如遥控玩具车
5、RGBLED灯元件。
可以同时发出三原色光模式的LED灯(红色、绿色、蓝色),支持通过调整红绿蓝个别的亮度,即可混合出各种不同色调的光色。
不低于以下配置要求:
LED控制模式:
DigitalPinofArduino;工作电压:
5v
6、白光LED灯元件。
可以发出高亮度白光的发光二极管(LED),可搭配光感组件自动亮起或关闭。
不低于以下配置要求:
LED控制模式:
DigitalPinofArduino;工作电压:
5v
7、光感应元件。
搭载光敏电阻,用以侦测环境的亮度,其亮度数值会根据组件上光敏电阻接收到的光照强度而变化。
例如外在环境变暗,光感应组件侦测到的数值就会随之变小。
不低于以下配置要求:
工作电压:
3.5v;工作电流:
0.5~3mA;响应时间:
20-30milliseconds;峰值波长:
540nm;重量:
4g
8、温度感应元件。
搭载温度侦测芯片,以侦测环境温度并产生对应的数值。
不低于以下配置要求:
工作电压:
3.3~5V;零功率电阻:
100KΩ;电阻容差:
±1%;工作温度范围:
-40~+125;标称B常数:
4250~4299K
、风扇马达元件。
9马达带动风扇旋转。
不低于以下配置要求:
输入电压:
5v;连接器:
4针输入信号的扣环接口;JST2.0接口用于直流电机;尺寸:
20mmx20mm。
10、智能积木增强套件。
以积木组装创作为基础,可以运用本产品搭建出至少40种不同的积木模型。
通过物联网学习器可以实现对模型的精准控制。
不低于以下配置要求:
以ABS无毒塑料所制成,已通过Intertek安全认证机构之无毒物测试,并可提供测试通过报告影印本。
已通过3C认证,并可提供3C认证证明文件影印本。
生产厂商之品牌已加入中国玩具和婴童用品协会安全承诺品牌。
积木零件总数量不低于304片,积木零件种类不低于60种。
支持拼装至少40种积木模型。
提供以ABS无毒塑料所制成的积木拆卸工具。
支持多面拼接(包含上、下、左、右、前、后六面均可与其他积木拼接),支持多面拼接的零件种类占比不低于80%。
积木主控盒通过二次开发具备支持同时驱动8颗(含)以上之连续伺服马达。
不低于以下配置要求:
按钮开关模块(3组),蜂鸣器模块,麦克风传感器可变电阻模块,数字讯号接口6个,马达接口3个
智能积木增强套件电子模块:
支持顺时针旋转、逆时针旋转,360度旋转
等同或优于以下所列:
工作电压:
4.8V;工作电流:
100mA;待机电流:
20mA;转速:
37rpm;扭力:
4.1kg/cm极限角度:
360°
支持顺时针旋转、逆时针旋转,实现180度旋转
等同或优于以下所列:
:
工作电压:
4.8-6V;工作电流:
250mA;待机电流:
10mA;反应转速0.1s/60度;扭力:
1.8kg/cm;极限角度:
180°
用来测量距离的电子模块,可以用来帮助机器模型避开障碍或其他有关测距避障的项目。
等同或优于以下所列:
核心组件:
GP2Y0A21YK0F;工作电压:
4.5V–5.5V;工作电流:
30mA;测量或感应范围:
10cm–80cm
支持感测光照的强度
等同或优于以下所列:
工作电压:
3.3V~5V;工作电流:
10mA以下
侦测距离变化,可应用于侦测障碍物
12、平板电脑。
不低于以下配置要求:
不低于Android6.0
≥MTKMT8163V/B四核64位处理器(1.3GHz)CortexA53。
集成MALI-T720MP2GPU,最高频率520MHz,支持OPENGLES1.x/2.0/3.0/3.1标准。
支持802.11abgn标准
支持2.4GHz+5GHz双频操作
≥LPDDR32GByte,32bit高速内存总线接口
16G/32GBeMMC,缺省采用16GBEMMC提供TF卡接口,支持64GB存储卡
≥高清800*1280分辨率,10.1寸IPS显示屏集成了高亮背光单元。
自带高灵敏电容触摸屏,同时支持5点触摸,采用G+G材质,触控IC集成在平板主板上
前置摄像头不低于:
200W,
支持最大分辨率1600x1200拍照,720P录像;后置不低于:
500W,
支持最大分辨率2560x1920拍照,1080P录像,支持美颜功能
不少于1个MicroUSB接口:
支持USBOTG2.0功能,支持外接U盘/鼠标等,支持USB充电,支持连接电脑进行数据交换;不少于1个TF卡;不少于1个4段耳机座带MIC:
支持apple标准耳机
支持H2651080P30FPS解码;支持H2641080P30FPS解码;支持MPEG4SP/ASP1080P30FPS解码;支持H2641080P30FPS编码;支持MPEG4SPD130FPS编码;支持8k-192k音频采样;支持16bit/24bit格式;支持单声道/立体声通道;支持WAV、MP3、MP2、AAC、AMR-NB、AMR-WB、MIDI、Vorbis、APE、AAC-plusv1、AAC-plusv2、WMA、ADPCM解码;支持AMR-NB、AMR-WB、AAC、OGG、ADPCM编码
不少于3轴Gsensor
支持
5V2A电源适配器,MicroUSB接口,220V50HZAC输入
不低于6500mAh,3.7V2cell聚合物电芯
≥6小时(连续播放在线高清视频)
不大于257*165*9.5mm
≤700g
铝合金+塑胶
认证标准ROHS、CCC
13、路由器。
不低于以下配置要求:
不少于5个10/100/1000MbpsRJ45端口或者:
提供1个串口,5个1000MbpsRJ45端口,默认1个广域网WAN口,4个局域网LAN口
2.4G(802.11n)2T2R+5G(802.11ac)2T2R
IPQ4019
≥32MBFlash&256MBRAM
802.11ac/n/a:
5.150GHz-5.850GHz
802.11b/g/n:
2.4GHz-2.483GHz
802.11ac:
高达867Mbps
802.11n:
高达400Mbps
802.11/g:
54,48,36,24,18,12,9and6Mbps
10Base-T:
3类或3类以上UTP
100Base-TX:
5类UTP
1000Base-TX:
6类UTP或STP
DC输入,12V-1.5A
基于Web的用户管理接口
通过http升级系统软件
不大于266*162*44毫米
≤860g
14、软件。
至少支持以下编程语言:
同时支持包含S4A(ScratchforArduino)、BlocklyAPP
支持Arduino开源硬件
图形化代码编程开源软件支持使用平板或者手机等移动设备传送控制码控制基于Arduino开源硬件之控制板、扩展板及电子模块
编程语言支持GoogleBlockly、JavaScript
支持将GoogleBlockly切换为JavaScript
图形化代码编程开源软件支持Android、iOS平台跨平台安装使用
图形化代码编程开源软件支持Micro-USB,蓝牙和wifi等无线方式连接和控制Arduino控制板
图形化代码编程开源软件支持通过云平台,提供推送及在线更新服务功能
15、教程。
至少包含以下教程资料:
有配套的电子版和纸质版教材教案
有配套的教学视频,含零件介绍、组装步骤、连接方法、程序编写、模型演示这五部分内容
产品组成需符合以下要求
平板电脑和路由器需与物联网学习器为相同厂商品牌,并提供产品认证证书。
3
移动机器人“未来农场”
1控制器:
采用ARM内核32位处理器,72MHz主频,16M扩展flash,64KRAM;采用通用USB接口,支持程序下载,支持扬声器功能、灯光特效功能。
2结构件:
采用ABS+PC工程塑料制造锥台造型,虚拟手臂;外形高度25cm;重量1.3kg;轮式结构、差动驱动方式,配专用电机及配套减速箱。
3传感器:
灰度传感器:
7只,巡线、颜色识别,有效范围0~30mm,检测灰度。
防跌落传感器:
3组;有效范围5-30mm。
碰撞传感器:
近身体底部的左前、正前、右前三个方向。
4执行件:
减速电机:
4个,闭环控制,实现不同的动力传输。
扬声器:
2个,立体音频输出。
LED灯:
分布于眼部、颈部、体前、电源按键多个部位,灯光效果独立可控。
5能源:
锂电池:
7.4V,1500mAh,带过充过放保护,低电压报警。
配专用适配器。
6软件:
适用于Windows7及以上版本操作系统,开发软件支持标准流程图编程和标准C语言编程。
流程图模块包含所有端口功能,支持子程序功能,0代码操作即可完成编程,同时流程图中支持嵌入C代码程序段。
流程图可自动生成C语言,C语言支持指针、数组、结构体等复杂应用。
库函数全开放。
4
1结构件:
设计比例基于标准的10毫米积木,拼插式搭建方式;独创的万向球窝结构,可快速搭建任何用户想要的造型。
组件数量不少于360个,组件种类不少于54种;主要组件包含:
11种线结构、4种面结构、4种轴、球窝球头连接件22种等。
5种齿轮13个,包含:
12半高锥齿轮、20半高锥齿轮、24直齿、12锥直齿轮、齿条。
3模型套装包含移动机器人赛场地图,能够完成移山东创客大赛移动机器人赛规则要求的所有任务模型的搭建。
提供场地布置方法说明和任务模型搭建说明。
选择场地图中不同的黑色虚线通过粘贴黑色胶带,展现多样任务,增加机器人赛的灵活性。
1
积木机器人“信息时代”
1BRC控制器(1套):
安卓系统全触屏智能控制器,通过无线连接下载对机器人进行控制。
处理器MTK6580,4核,主频1.3GHz、4GFLASH、512MRAM,操作系统Android5.1。
320x320pixels触摸屏,带背光,可以显示图形和字符。
控制器共有4路输出,8路输入。
支持IOS/ANDROID平台,连接方式为WIFI连接,1500mAh锂电池供电方式。
2结构件:
设计比例基于标准的10毫米积木,拼插式搭建方式,无螺丝搭建设计。
组件数量不少于459个,组件种类不少于47种。
主要元器件包含六面搭建立方体若干、3种点结构、1种面结构、15种线结构、6种轴、2种轴承等。
各种类型结构部件还以颜色区分,全套产品颜色多于5种。
能够完成至少15个教学项目。
3传动件:
17种齿轮齿条46个,包含:
8直齿、24直齿、40直齿轮、16直齿轮、12半高锥齿轮、20半高锥齿轮、12锥直齿轮、20锥直齿轮、36锥直齿轮、齿条-1、蜗杆、28差速齿、52转盘齿底盘盖、52转盘齿底盘、
六面搭建立方体的5:
1减速齿轮箱、1:
1转向齿轮箱、1:
1带轴转向齿轮箱。
4传感器:
BRC碰撞检测传感器:
2个,三种模式:
检测与某个物体碰撞情况避障模式、使用手指触发某个动作触发模式、机械回零限位模式;按钮行程4mm,按下闭合时返回值大于2000,弹起断开时返回值小于1000。
BRC灰度检测传感器:
5个,2-5cm内灰度采集范围0-4095。
BRC超声测距传感器:
1个,检测障碍物与传感器之间的距离,测量距离50-1500mm,测量广角20度。
磁敏开关:
2个(工作电压5V,可以检测到磁铁等带磁场的物体,测量范围:
0-10mm,靠近时显示4095,断开时为0)。
5执行器:
小电机:
3个;内置位置传感器,分辨率1度;转速:
320-330r/min,旋转时扭矩8Ncm;停止时扭矩35Ncm。
红灯、绿灯、黄灯、蓝灯:
各1个(工作电压5V,LED灯,通电后发光,断电后熄灭,工作电流20mA)。
6能源:
BRC控制器锂电池为7.4V1500mAh11.1Wh专用锂电池,自带过充、过放和短路保护电路。
含专用适配器。
7软件系统:
BRC控制器软件支持多操作系统,可以运行在Android,IOS,MacOS以及Windows系统上,支持标准流程图式图形化编程。
2
包含:
结构件组件数量438个,组件种类45种;传动件齿轮齿条种类4种,数量7个;模型套装包含积木赛场地图。
附场地布置方法说明和任务模型搭建说明。
能够完成山东省创客大赛积木机器人赛规则要求的所有任务模型的搭建。
1
模块器人“丛林之旅”
1控制器:
安卓系统全触屏智能控制器,处理器为MTK6580,4核,主频1.3GHz、4GFLASH、512MRAM,操作系统Android5.1;采用通用USB接口,支持程序下载;支持320x320pixels触摸屏、陀螺仪,指南针,扬声器、麦克风功能;通用485总线接口,8路输出(其中6路4PIN接口供智能电机,1路3PIN接口供电源)。
2结构件:
多种连接件搭配独创的万向球窝结构、轮式结构、差动驱动方式构建智能小车。
3执行件:
智能电机:
4套,内置位置传感器,分辨率1度;空载转速:
63±3r/min;额定旋矩10Ncm;堵转扭矩54Ncm。
4能源:
锂电池:
7.4V,1500mAh,带过充过放保护,低电压报警。
配专用适配器。
5软件:
适用于Windows7及以上版本操作系统,开发软件支持标准流程图编程。
流程图模块包含所有端口功能,支持子程序功能,0代码操作即可完成编程。
2
1结构件:
连接件主要包含球窝结构、骨架结构、脊柱结构等,独创的万向球窝结构,可快速搭建任何用户想要的造型,各种类型结构部件还以颜色区分,全套产品颜色多于3种。
2模型套装包含赛场地图,能够完成山东创客大赛模块机器人赛规则要求的所有任务模型的搭建。
提供场地布置方法说明和任务模型搭建说明。
1
移动机器人“未来农场”
1控制器:
采用ARM内核32位处理器,72MHz主频,16M扩展flash,64KRAM;采用通用USB接口,支持程序下载,支持扬声器功能、灯光特效功能。
2结构件:
采用ABS+PC工程塑料制造锥台造型,虚拟手臂;外形高度25cm;重量1.3kg;轮式结构、差动驱动方式,配专用电机及配套减速箱。
3传感器:
灰度传感器:
7只,巡线、颜色识别,有效范围0~30mm,检测灰度。
防跌落传感器:
3组;有效范围5-30mm。
碰撞传感器:
近身体底部的左前、正前、右前三个方向。
4执行件:
减速电机:
4个,闭环控制,实现不同的动力传输。
扬声器:
2个,立体音频输出。
LED灯:
分布于眼部、颈部、体前、电源按键多个部位,灯光效果独立可控。
5能源:
锂电池:
7.4V,1500mAh,带过充过放保护,低电压报警。
配专用适配器。
6软件:
适用于Windows7及以上版本操作系统,开发软件支持标准流程图编程和标准C语言编程。
流程图模块包含所有端口功能,支持子程序功能,0代码操作即可完成编程,同时流程图中支持嵌入C代码程序段。
流程图可自动生成C语言,C语言支持指针、数组、结构体等复杂应用。
库函数全开放。
4
1结构件:
设计比例基于标准的10毫米积木,拼插式搭建方式;独创的万向球窝结构,可快速搭建任何用户想要的造型。
组件数量不少于360个,组件种类不少于54种;主要组件包含:
11种线结构、4种面结构、4种轴、球窝球头连接件22种等。
5种齿轮13个,包含:
12半高锥齿轮、20半高锥齿轮、24直齿、12锥直齿轮、齿条。
3模型套装包含移动机器人赛场地图,能够完成移山东创客大赛移动机器人赛规则要求的所有任务模型的搭建。
提供场地布置方法说明和任务模型搭建说明。
选择场地图中不同的黑色虚线通过粘贴黑色胶带,展现多样任务,增加机器人赛的灵活性。
1
飞行机器人“空中救援”
1控制器:
32位ARM处理器,CPU频率168M,内置实时操作系统,通过WIFI无线连接对机器人进行控制。
2传感器:
红外传感器:
飞行限高10m;定高精度1cm;探测机体下方物体的距离。
光流传感器:
QVGA;120fps;30W像素;用于室内视觉定位,通过图像反馈判定飞行器的速度。
气压传感器:
24位ADC,高度精确到20cm。
通过
 升级会员
升级会员 