锁相环仿真.docx
《锁相环仿真.docx》由会员分享,可在线阅读,更多相关《锁相环仿真.docx(10页珍藏版)》请在冰豆网上搜索。
锁相环仿真
锁相环仿真
1.锁相环的理论分析
1.1锁相环的基本组成
锁相环路是一种反馈控制电路,简称锁相环(PLL,Phase-LockedLoop)。
锁相环的特点是:
利用外部输入的参考信号控制环路内部振荡信号的频率和相位。
因
锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。
锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位
被锁住,这就是锁相环名称的由来。
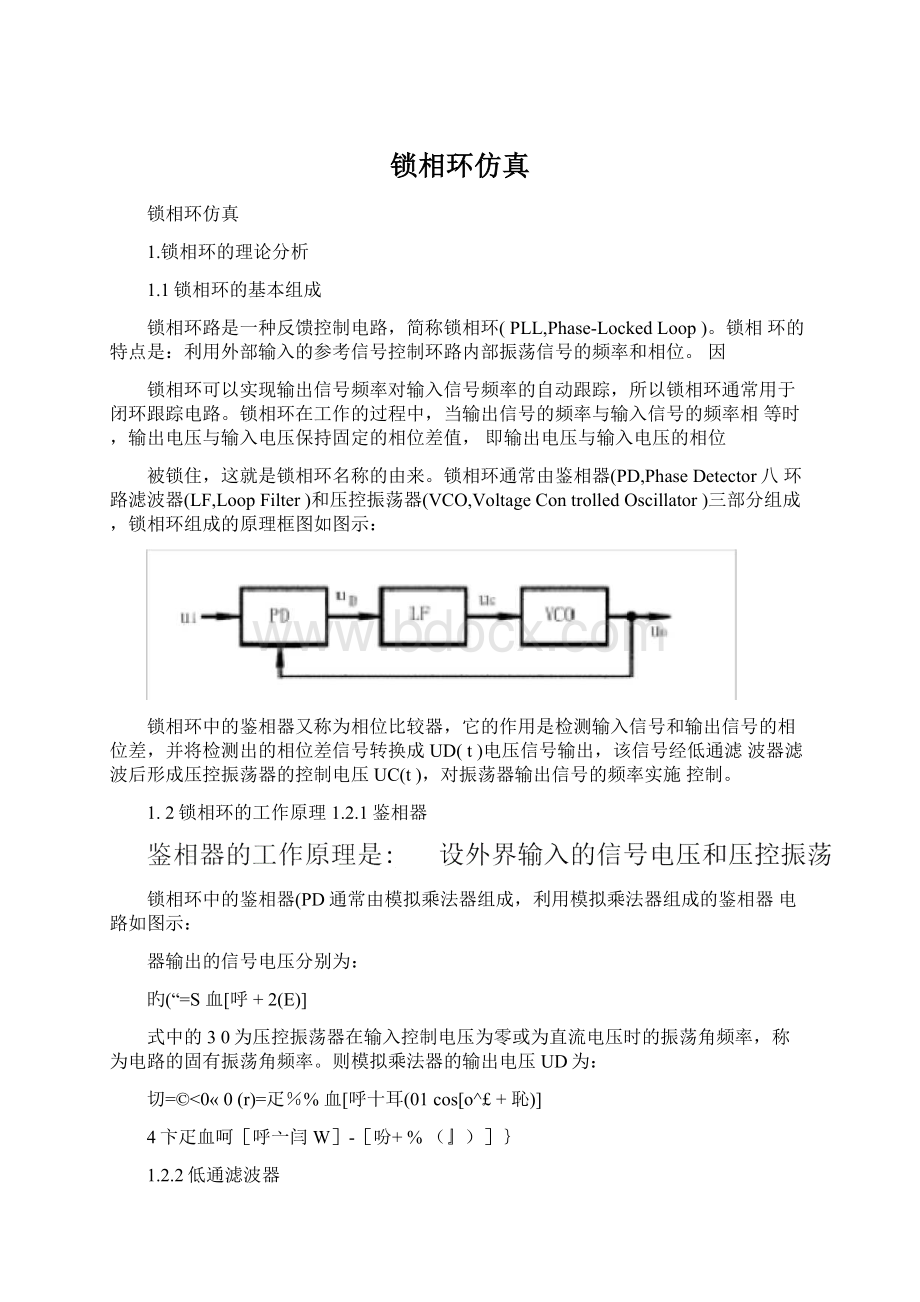
锁相环通常由鉴相器(PD,PhaseDetector八环路滤波器(LF,LoopFilter)和压控振荡器(VCO,VoltageControlledOscillator)三部分组成,锁相环组成的原理框图如图示:
锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成UD(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压UC(t),对振荡器输出信号的频率实施控制。
1.2锁相环的工作原理1.2.1鉴相器
锁相环中的鉴相器(PD通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图示:
器输出的信号电压分别为:
旳(“=S血[呼+2(E)]
式中的30为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。
则模拟乘法器的输出电压UD为:
切=©<0«0(r)=疋%%血[呼十耳(01cos[o^£+恥)]
4卞疋血呵[呼亠闫W]-[吩+%(』)]}
1.2.2低通滤波器
低通滤波器(LF)的将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压Uc(t)。
即Uc(t)为:
心二Sin{[呼十qQ]-[附十址(£)])
=%鈕{(眄-四)"+[MQ)-州(切}
式中的3i为输入信号的瞬时振荡角频率,Bi(t)和BO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为:
贝U,瞬时相位差Bd为
爲=⑷■讪+做)T©
上式等于零,说明锁相环进入相位锁定的状态,此时输出和输入信号的频率和相位保持恒定不变的状态,Uc(t)为恒定值。
当上式不等于零时,说明锁相环的相位还未锁定,输入信号和输出信号的频率不等,uc(t)随时间而变。
123压控振荡器
压控振荡器(VCO的压控特性如图示
该特性说明压控振荡器的振荡频率3u以30为中心,随输入信号电压Uc(t)线性地变化,变化的关系如下:
上式说明当uc(t)随时间而变时,压控振荡器(VCO的振荡频率3u也随时间而变,锁相环进入“频率牵引”,自动跟踪捕捉输入信号的频率,使锁相环进入锁定的状态,并保持30=3i的状态不变。
2•信号流程图
锁相环的原理框图如下:
LI—PD
VCU-
■
IlH
L
其工作过程如下:
(1)压控振荡器的输出Uo经过采集并分频;
(2)输出和基准信号同时输入鉴相器;
(3)鉴相器通过比较上述两个信号的频率差,然后输出一个直流脉冲电压Ud;
(4)Ud进入到滤波器里面,滤除高频成分后得到信息Ue;
(5)Ue进入到压控震荡器VCO里面,控制频率随输入电压线性地变化;
(6)这样经过一个很短的时间,VCO勺输出就会稳定于某一期望值。
3.1程序代码:
%File:
c6_nItvde.mw2b=0;w2c=0;yd=0;y=0;
tfinal=50;
fs=100;
delt=1/fs;
npts=1+fs*tfinal;ydv=zeros(1,npts);yv=zeros(1,npts);
%
3•二阶环仿真源程序代码及仿真结果
%initializeintegrators
%initializedifferentialequation
%simulationtime
%samplingfrequency
%samplingperiod
%numberofsamplessimulated
%vectorofdy/dtsamples
%vectorofy(t)samples
%time
%defort<20
%defort>=20
%firstintegrator-step1
%firstintegrator-step2%firstintegratoroutput
%beginningofsimulationloopfori=1:
npts
t=(i-1)*delt;
ift<20
ydd=4*exp(-t/2)-3*yd*abs(y)-9*y;else
ydd=4*exp(-t/2)-3*yd-9*y;
end
w1b=ydd+w2b;
w2b=ydd+w1b;
yd=w1b/(2*fs);
%secondintegrator-step1
%secondintegrator-step2%secondintegratoroutput%builddy/dtvector%buildy(t)vector%endofsimulationloop
%plotphaseplane
%labelxaxis
%labelyzxis
k=menu('PhaseLockLoopPostprocessor',...
'InputFrequencyandVCOFrequency',...
'InputPhaseandVCOPhase',...
'FrequencyError','PhaseError','PhasePlanePlot',...
'PhasePlaneandTimeDomainPlots','ExitProgram');ifk==1
plot(t,fin,'k',t,fvco,'k')
title('InputFrequencyandVCOFreqeuncy')xlabel('Time-Seconds');ylabel('Frequency-Hertz');pauseelseifk==2
pvco=phin-phierror;plot(t,phin,t,pvco)title('InputPhaseandVCOPhase')xlabel('Time-Seconds');ylabel('Phase-Radians');pauseelseifk==3
plot(t,freqerror);title('FrequencyError')xlabel('Time-Seconds');ylabel('FrequencyError-Hertz');pauseelseifk==4
plot(t,phierror);title('PhaseError')xlabel('Time-Seconds');ylabel('PhaseError-Radians');pauseelseifk==5
ppplot
elseifk==6
subplot(211);phierrn=phierror/pi;plot(phierrn,freqerror,'k');grid;title('PhasePlanePlot');xlabel('PhaseError/Pi');ylabel('FrequencyError-Hertz');subplot(212)plot(t,fin,'k',t,fvco,'k');gridtitle('InputFrequencyandVCOFreqeuncy')xlabel('Time-Seconds');ylabel('Frequency-Hertz');subplot(111)elseifk==7
%Endofscriptfile.
%besafe
%insertblankline
kk=1;endend
%File:
pllpre.m%clearalldisp('')fdel=input('EnterthesizeofthefrequencystepinHertz>');fn=input('EntertheloopnaturalfrequencyinHertz>');lambda=input('Enterlambda,therelativepoleoffset>');disp('')disp('Acceptdefaultvalues:
')disp('zeta=1/sqrt
(2)=0.707,')disp('fs=200*fn,and')disp('tstop=1')dtype=input('Enteryforyesornforno>','s');ifdtype=='y'
zeta=1/sqrt
(2);fs=200*fn;tstop=1;
%
%numberofsimulationpoints%defaulttimevector%setnsettletimeas0.1*npts%settsettle
elsezeta=input('Enterzeta,theloopdampingfactor>');fs=input('EnterthesamplingfrequencyinHertz>');tstop=input('Entertstop,thesimulationruntime>');endnpts=fs*tstop+1;t=(0:
(npts-1))/fs;nsettle=fix(npts/10);tsettle=nsettle/fs;
%Thenexttwolinesestablishtheloopinputfrequencyandphase%deviations.
fin=[zeros(1,nsettle),fdel*ones(1,npts-nsettle)];phin=[zeros(1,nsettle),2*pi*fdel*t(1:
(npts-nsettle))];disp('')%insertblankline
%endofscript
%File:
pll2sin.m
w2b=0;w2c=0;s5=0;phivco=0;%initialize
twopi=2*pi;%define2*pi
twofs=2*fs;%define2*fs
%setfilterparameter
%defineconstants%initializevector
%initializevector
G=2*pi*fn*(zeta+sqrt(zeta*zeta-lambda));%setloopgaina=2*pi*fn/(zeta+sqrt(zeta*zeta-lambda));a1=a*(1-lambda);a2=a*lambda;
phierror=zeros(1,npts);fvco=zeros(1,npts);
%beginningofsimulationloop
fori=1:
npts
s1=phin(i)-phivco;s2=sin(s1);s3=G*s2;s4=a1*s3;s4a=s4-a2*s5;w1b=s4a+w2b;w2b=s4a+w1b;s5=w1b/twofs;s6=s3+s5;w1c=s6+w2c;w2c=s6+w1c;phivco=w1c/twofs;phierror(i)=s1;fvco(i)=s6/twopi;
%phaseerror
%sinusoidalphasedetector
%loopfilterintegratorinput%filterintegrator(step1)%filterintegrator(step2)%generatefiteroutput
%VCOintegratorinput
%VCOintegrator(step1)
%VCOintegrator(step2)%generateVCOoutput%buildphaseerrorvector%buildVCOinputvector
end
%endofsimulationloopfreqerror=fin-fvco;
%buildfrequencyerrorvector
%Endofscriptfile.
function[]=pplane(x,y,nsettle)
%Plotsthephaseplanewithphaseintherange(-pi,pi)
ln=length(x);
maxfreq=max(y);
minfreq=min(y);
close%Oldfigurediscarded
axis([-111.1*minfreq1.1*maxfreq]);%Establishscale
holdon%Collectinfofornewfigj=nsettle;
whileji=1;
whilex(j)a(i)=x(j)/pi;b(i)=y(j);
j=j+1;
i=i+1;
end
plot(a,b,'k')
a=[];
b=[];
x=x-2*pi;endholdofftitle('Phase-PlanePlot')xlabel('PhaseError/Pi')
ylabel('FrequencyErrorinHertz')
grid%Endofscriptfile.
%File:
ppplot.m
%ppplot.misthescriptplottingphaseplaneplots.Ifthe
%phaseplaneisconstrainedto(-pi,pi)ppplot.mcallspplane.m.
kz=0;
whilekz==0
k=menu('PhasePlaneOptions',...
'ExtendedPhasePlane',...
卩hasePlanemod(2pi)',...
'ExitPhasePlaneMenu');
ifk==1
phierrn=phierrn/pi;
plot(phierrn,freqerror,'k')
title('PhasePlanePlot')
xlabel('PhaseError/Pi')ylabel('FrequencyError-Hertz')grid
pause
elseifk==2
pplane(phierrn,freqerror,nsettle+1)
pause
elseifk==3
kz=1;
end
end%Endofscriptfile.
G=30时的仿真图形:
Acceptthetentativevalues:
thefirstloopfrequencyis5
Enteryforyesornforno>y
Entertheloopgain>30输入环路增益为
30
EnterthesamplingfrequencyinHertz>1200
Entertstop,thesimulationruntime>5仿真时间为5秒
相位差图
G=40时的仿真图形:
Acceptthetentativevalues:
thefirstloopfrequencyis5
Enteryforyesornforno>y
Entertheloopgain>40输入环路增
益为40
EnterthesamplingfrequencyinHertz>1200
Entertstop,thesimulationruntime>5仿真时间为5秒
相平面图
输入频率和VCO频率图
频率差图
相位差图
Pfi*涓tiidi
:
:
艾i
若.2D15
EUrT-iiciJigtLi
D0.1'fiJ0.30.4D£Ofi01
LitibE列M
输入相位和VCO相位图
输入频率和VCO频率图
5
H'MFre^utncyrdVCOFre^nc/
4JX2OIO
HC4Z・J?
conbE
01020304050.60700
Thw・SKondi
M*F心空Hfp
 升级会员
升级会员 