电机随动系统单片机控制器的设计.docx
《电机随动系统单片机控制器的设计.docx》由会员分享,可在线阅读,更多相关《电机随动系统单片机控制器的设计.docx(7页珍藏版)》请在冰豆网上搜索。
电机随动系统单片机控制器的设计
Ξ电机随动系统单片机控制器的设计
3
胡 敏,杨栓虎
(中国兵器工业第203研究所,西安710065[摘要]运用滑模理论设计了一种随动系统的控制器,并详细阐述了该控制器的基
本组成、原理、特点、动态特性及其具体的电路。
试验结果表明:
所设计的控制器达
到系统技术指标要求,从而为导弹随动系统设计提供了一种新方法。
[关键词]电机随动系统;单片机控制器;滑模控制
[中图分类号]TJ765 [文献标识码]A
1 系统结构
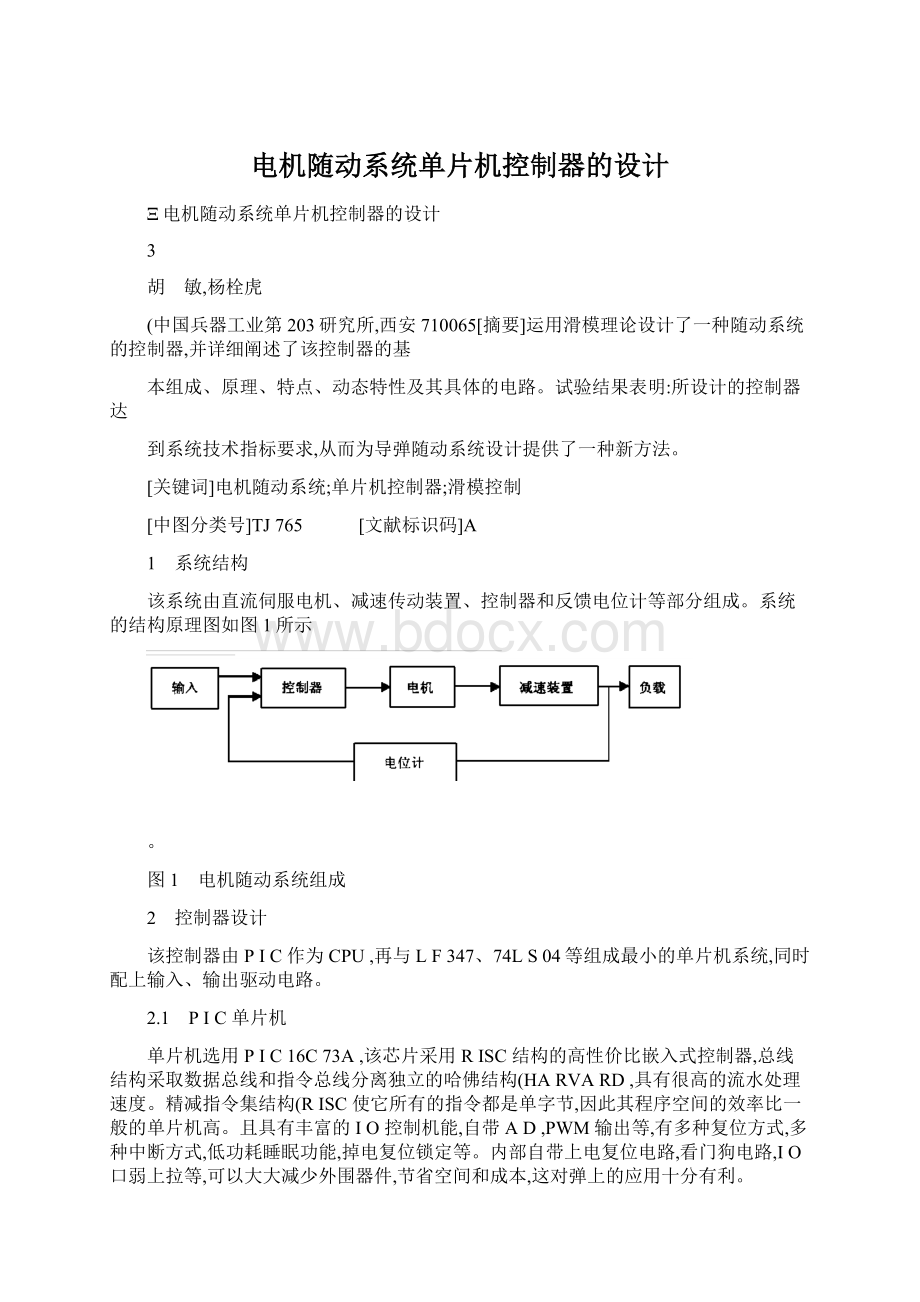
该系统由直流伺服电机、减速传动装置、控制器和反馈电位计等部分组成。
系统的结构原理图如图1所示
。
图1 电机随动系统组成
2 控制器设计
该控制器由PIC作为CPU,再与LF347、74LS04等组成最小的单片机系统,同时配上输入、输出驱动电路。
2.1 PIC单片机
单片机选用PIC16C73A,该芯片采用RISC结构的高性价比嵌入式控制器,总线结构采取数据总线和指令总线分离独立的哈佛结构(HARVARD,具有很高的流水处理速度。
精减指令集结构(RISC使它所有的指令都是单字节,因此其程序空间的效率比一般的单片机高。
且具有丰富的IO控制机能,自带AD,PWM输出等,有多种复位方式,多种中断方式,低功耗睡眠功能,掉电复位锁定等。
内部自带上电复位电路,看门狗电路,IO口弱上拉等,可以大大减少外围器件,节省空间和成本,这对弹上的应用十分有利。
・
95・ 第1期弹箭与制导学报Ξ收稿日期:
2000201207作者简介:
胡敏,工程硕士研究生,从事制导兵器与系统技术研究。
具体应用如图2,误差信号从模拟输入口1、2至PIC,经PIC产生PWM控制信号,从PWM口输出到驱动器
。
图2 单片机应用原理图
2.2 输入回路
输入回路的作用是采样信号并作误差运算,给单片机提供可读的输入信号。
控制器的4个输入分别经输入回路加到PIC的4个输入口。
具体电路如图3所示
。
图3 输入电路图
其中,稳压管Dl提供偏置电压,当e=0时,电位提到2.5V,电阻R5和电容Cl组成滤波电路,为的是减少电噪声,抑制干扰,稳压管D2和D3的作用是限制输出电压,以保护PIC单片机的输入口不因输入过大而烧毁,运放Al的作用是改善反馈放大器的输出阻抗,运放A2的作用是改变放大倍数。
2.3 输出驱动回路
单片机控制器控制4个系统,每一路的输出控制信号,经单片机的PWM口输出,然后接至H桥驱动器上,再到电机。
驱动器选用NSC公司生产的LMD18200,工作电压可达55V,连续工作电流可达3A,峰值电流6A。
它有很低的导通电阻,R=0.38,在同一芯片上制作了BiCMOS控制电路和DMOS功率器件。
该驱动器体积小、重量轻,响应速度快,开关
・06・弹箭与制导学报2000年
工作频率允许达500kHz。
该驱动器还有过电压、过电流和过热保护功能。
当电机出现短路、堵转等过载情况时,会自动关断输出的功率开关。
但内电路会周期性地使功率开关恢复正常工作方式。
如果过电流仍旧发生,最后由过热保护动作来关闭整个集成电路。
LMD18200原理如图4所示
。
图4 LMD18200原理图
PWM信号从DIRECTION脚输入,50%占空比PWM信号对应于零驱动,平均负载电流为零。
而大于50%占空比的PWM信号对应于正向电流,负载电流从2脚向10脚方向流过。
小于50%占空比的PWM信号对应于负向电流,负载电流从10脚向2脚方向流过。
2.4 滑模控制算法设计
电机随动系统方块图如图5所示
:
图5 电机随动系统方块图
对单输入控制系统的变结构问题,反馈控制系统如图
6:
图6 输出反馈控制系统
其中:
G(s=b
s2+a2×s+a1,则 b=KmTm,a1=0,a2=1TM。
取Km=250,Tm=・16・ 第1期电机随动系统单片机控制器的设计 胡 敏等
0.01时,b=25000,a2=100。
在上述结构图中r(t为闭环系统的参考输入,f1=f1(t;f2=f2(t为系统的外部扰动。
在本系统中设f1=f2=0。
采用比例切换控制,切换函数为
S=C1×X1+X2(1
取控制策略为U=ΥX1
(2其中:
X1=e,X2=e・, Υ=Α1 X1S>0Β1 X2S<0
1按广义滑模条件,SS・<0。
由S=X1+C1X2 得X2=S-C1X1,则:
dSdt=dX2dt+CdX1dt
=(C1-a2S+(C1a2-C21-a1-bΥX1(3
为使广义滑模条件成立首先要使式(3等号后边第一项的系数为负。
即:
C1-a2<0
并且还须:
当S>0,X>0时, C1a2-C21-a1-bΑ1<0;当S>0,X<0时, C1a2-C21-a1-bΒ1>0;当S<0,X>0时, C1a2-C21-a1-bΒ1>0;当S<0,X<0时, C1a2-C21-a1-bΑ1<0。
综合上列五式得:
Α1≥(C1a1-
C21-a1b-1Β1≤(C1a2-C21-a1b-1
C1≤a2
可知滑模参数C1的选择受到控制对象参数a2的限制。
2滑模可达性条件为下列特征方程:
P2+a2P+(a1+bΑ1=0
上式有负实根或复根(可具正实部或负实部。
若取复根,则:
Α1>(a22-
4a14b=0.1。
取Α1=1,Β1=-
1,C1=250,取对称的参数,使电路实现更容易。
为保证以上取值的合理性,可在误差的综合部分加适当的放大倍数,以期使系统的增益足够大。
3 试验结果
按以上控制算法,控制器控制单通道1路电机时,在小信号输入下,系统的幅频、相频特性如图7、图8,其中的23dB的频率可达43Hz,290°相移频率达18Hz。
・
26・弹箭与制导学报2000年
图7
系统幅频特性
图8 系统相频特性
操满舵下,斜坡跟踪精度如图
9:
图9 系统跟踪特性
在小信号输入下,系统阶跃响应如图10,系统基本无纹波,无超调。
・
36・ 第1期电机随动系统单片机控制器的设计 胡 敏等
・64・弹箭与制导学报2000年 图10 系统阶跃响应4 结 论本文运用变结构控制理论设计的控制器在一种导弹电机随动系统中应用,该系统快速性好,无超调,达到了性能指标要求。
而且结构简单,容易实现,适合弹上应用。
该系统获得了强鲁棒性,对于变参数和干扰不具有敏感性。
参 考 文 献1 王丰尧.滑模变结构控制[M].机械工业出版社1997..2 诸静等.滑模控制原理与应用[M].机械工业出版社1997..3 周军变结构控制理论在电动舵机系统中的应用[J].西北工业大学学报(8.1992(3..4 李东星等.PIC16CXX系列单片机应用设计[M]..1996.5 戴忠达.自动控制原理基础[M].清华大学出版社1989..DesignofElectricMotorStochaticSystemSinglechipProcessorControllerHuMin,YangShuanhu(203InstituteofChinaOrdnanceIndustry,Xian710065[Abstract]Byusingslidingmodesystemtheory,havingfinishedsomeelectricmotorstochasticsystemcontroller,whiledescribingbasicconstruction、rincinple、pdynamiccharacteristicandspecificcircuitaboutthecontroller.Experientalresultsshowthedesignedcontrollerhasachievedtechnologyindex,whilemprovidinganewreseachwayforelecticmotorstochasticsystem.[Keywords]Electricmotorstochasticsystem;Singlechipprocessorcontroller;Slidingmodecontrol.©1995-2005TsinghuaTongfangOpticalDiscCo.,Ltd.Allrightsreserved.
 升级会员
升级会员 