自动控制课程设计题目.docx
《自动控制课程设计题目.docx》由会员分享,可在线阅读,更多相关《自动控制课程设计题目.docx(13页珍藏版)》请在冰豆网上搜索。
自动控制课程设计题目
自动控制课程设计题目
题目一转子绕线机控制系统
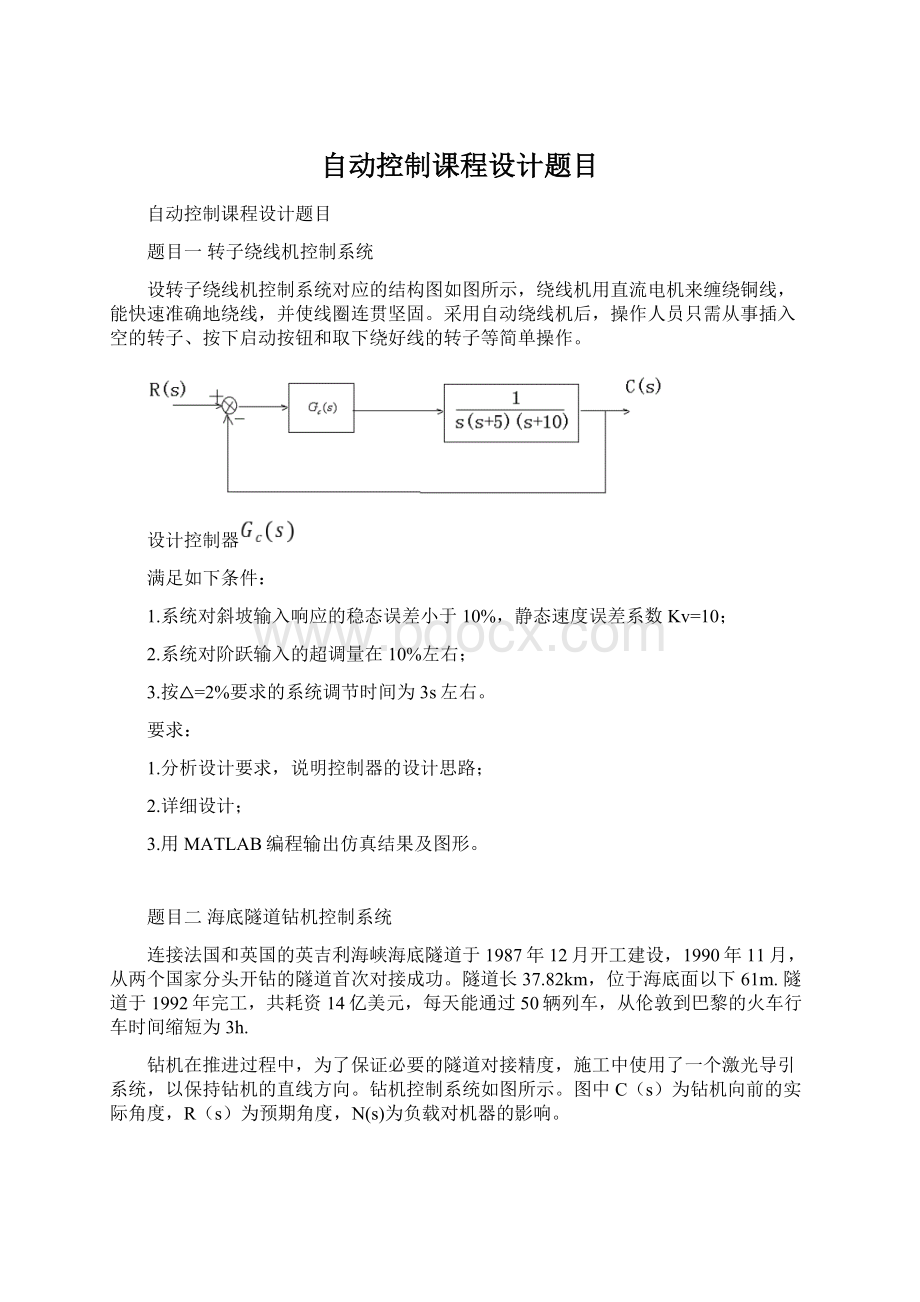
设转子绕线机控制系统对应的结构图如图所示,绕线机用直流电机来缠绕铜线,能快速准确地绕线,并使线圈连贯坚固。
采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕好线的转子等简单操作。
设计控制器
满足如下条件:
1.系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数Kv=10;
2.系统对阶跃输入的超调量在10%左右;
3.按△=2%要求的系统调节时间为3s左右。
要求:
1.分析设计要求,说明控制器的设计思路;
2.详细设计;
3.用MATLAB编程输出仿真结果及图形。
题目二海底隧道钻机控制系统
连接法国和英国的英吉利海峡海底隧道于1987年12月开工建设,1990年11月,从两个国家分头开钻的隧道首次对接成功。
隧道长37.82km,位于海底面以下61m.隧道于1992年完工,共耗资14亿美元,每天能通过50辆列车,从伦敦到巴黎的火车行车时间缩短为3h.
钻机在推进过程中,为了保证必要的隧道对接精度,施工中使用了一个激光导引系统,以保持钻机的直线方向。
钻机控制系统如图所示。
图中C(s)为钻机向前的实际角度,R(s)为预期角度,N(s)为负载对机器的影响。
该系统设计目的是选择增益K,使系统对输入角度的响应满足工程要求,并且使扰动引起的稳态误差较小。
要求:
1.分析设计要求,说明控制器的设计思路;
2.详细设计;
3.用MATLAB编程输出仿真结果及图形。
题目三哈勃太空望远镜指向控制
哈勃太空望远镜于1990年4月14日发射至离地球611km的太空轨道,它的发射与应用将空间技术发展推向了一个新的高度。
望远镜的2.4m镜头拥有所有镜头中最光滑的表面,其指向系统能在644km以外将视野聚集在一枚硬币上。
望远镜的偏差在1993年12月的一次太空任务中得到了大范围的校正。
哈勃太空望远镜指向系统模型经简化后的结构图如图所示
设计目标是选择放大器增益Ka和具有增益调节的测速反馈系数K1,使指向系统满足如下性能:
1.在阶跃指令r(t)作用下,系统输出的超调量小于或等于10%.
2.在斜坡输入作用下,稳态误差较小。
3.减小单位阶跃扰动的影响。
要求:
1.分析设计要求,说明控制器的设计思路;
2.详细设计;
3.用MATLAB编程输出仿真结果及图形。
题目四单位负反馈系统校正
设单位负反馈系统的开环传递函数为
用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:
(1)相角裕度
;
(2)在单位斜坡输入下的稳态误差为
;
(3)系统的剪切频率小于7.5rad/s。
要求:
(1)分析设计要求,说明校正的设计思路;
(2)详细设计;
(3)用MATLAB编程代码及运行结果(包括图形、运算结果);
(4)校正前后系统的单位阶跃响应图。
题目五校正器的设计
已知单位负反馈系统的开环传递函数
,试用频率法设计串联校正装置,要求校正后系统的静态速度误差系数Kv=25,系统的相角裕度大于等于45度,校正后的剪切频率
。
要求:
1.明确设计任务,建立系统模型,求出系统传递函数。
2.确定系统传递函数各个参数的大致范围,并根据查阅的资料确定参数,写出开环传递函数,并用MATLAB对系统进行仿真。
3.简化模型,修改参数,设计校正环节,使系统稳定并符合题目的要求,画出校正前后bode图。
题目六机器人手臂控制系统
机器人手臂具有很大的惯性,主要依靠步进电机驱动相应的关节,实现手臂的运动,其控制电压输入为u,输出为关键转动的角度w,如图所示:
要求:
1.建立直流电机系统的数学模型,写出传递函数的表达式。
2.调整放大器增益,使得系统在斜坡输入r(t)时,系统稳态误差小于0.1mm。
3.画出系统的波特图。
4.如果要求系统静态误差系数Kv≥5(s-1),相角裕度大于45度,设计串联校正装置,要求校正后截止频率大于2rad/s.
题目七液位自动控制系统设计
1、任务简介
某化工厂水箱的排水量根据工业生产的需要而不断地变化,为了保持水箱压力恒定,就要保持水位恒定,因此就必须自动调整进水量。
(应用PLC)
2、工作方式
本系统要求有手动和自动两种工作方式。
手动控制方式用于水泵的调试,即当按下按钮时水泵运转,松开按钮时水泵停止,目的是为了调试水泵是否能正常工作;当系统切换为自动控制方式并启动后,控制系统自动调整水泵的进水量达到给定水位恒定。
水位设定高限和低限,当水位超过设定的限位时要进行超限报警。
3、技术参数
控制系统技术参数表
变量名称
技术参数
备注
水位范围
0-3.0m
水位设定值
2.0m
水位误差
±0.5m
水位低限
1.0m
超限报警
水位高限
2.6m
超限报警
题目八基于PLC的三层货梯控制
1.任务描述:
外叫按钮控制方式是电梯的一种较简单的自动控制方式。
电梯由安装在各楼层厅口的呼叫按钮进行操纵,其操纵方式为呼叫(召唤)电梯、指令运行方向和停靠楼层。
电梯上、下由一台电机驱动;电机正转,驱动电梯上升;电机反转,驱动电梯下降。
每层楼设有呼叫按钮SB1-SB3、呼叫指示灯HL1-HL3和到位行程开关SQ1-SQ3Q。
电梯上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效(简称“不可逆响应”)。
响应呼叫时,呼叫指示灯亮。
2.控制要求说明如下表所示:
序号
输入
输出
原行楼层
呼叫楼层
运行方向
运行结果
01
1
3
升
上升到3层停
02
2
3
升
上升到3层停
03
3
3
停
呼叫无效
04
1
2
升
上升到2层
05
2
2
停
呼叫无效
06
3
2
降
下降到2层
07
1
1
停
呼叫无效
08
2
1
降
下降到1层
09
3
1
降
下降到1层
10
1
2,3
升
先升到2层后停5秒后再升到3层
11
2
先1后3
降
下降到1层
12
2
先3后1
升
上升到3层停
13
3
2,1
降
先降到2层停5秒后再降到1层停
14
2
1,3
降
下降到1层停,3层呼叫无效
题目九自动售货机
1、任务简介
自动投币售货
2、工作方式
(1)此售货机可投入1元、5元或1O元硬币。
(2)当投入的硬币总值超过12元时,汽水按钮指示灯亮;又当投入的硬币总值超过15元时,汽水及咖啡按钮指示灯都亮。
(3)当汽水按钮灯亮时,按汽水按钮,则汽水排出7秒后自动停止,这段时间内,汽水指示灯闪动。
(4)当咖啡按钮灯亮时,按咖啡按钮,则咖啡排出7秒后自动停止,这段时间内,咖啡指示灯闪动。
(5)若投入硬币总值超过按钮所需的钱数(汽水12元,咖啡15元)时,找钱指示灯亮,表示找钱动作,并退出多余的钱。
3、设计要求
根据要求,写出梯形图及指令表。
题目十花样喷泉
1.任务简介
花式喷水如图所示,第一花样配以绿灯,第二花样配以蓝灯,第三花样配以黄灯,第四花样配以红灯。
在花样确定的前提下,可以通过修改程序或者改变外接的控制开关的时间,就可改变控制方式,达到显现各种复合花样的要求。
自动投币售货
2.工作方式
按下起动按纽XO且X2一直接通,则第一花样输出且绿灯亮;1分钟后,第二花样输出且蓝灯亮;到2分钟时,第三花样输出且黄灯亮;到3分钟时,第四花样输出且红灯亮。
即各延时1分钟后,第1---4花样相继显现并一直保持1—4种花样同时显现。
若XO按下后,X2仅接通1分钟,则1—4花样轮流显现1分钟,然后暂停1分钟,如此循环。
3.设计要求
根据要求,写出梯形图及指令表。
题目十一循环油料系统
1.任务简介
2.工作方式
(1)当起动按钮按下时,泵1、2通电运行,由泵1将油从循环槽打入淬火槽,经沉淀槽,
再由泵2打入循环槽,运行15分钟后,泵1、2停。
(2)在泵l、2运行期间,当沉淀槽液位到达高液位时,液位传感器SLl接通,此时泵l停,泵2继续运行1分钟。
(3)在泵1、2运行期间,当沉淀槽液位到达低液位时,液位传感器SL2接通,此时泵2停,泵1继续运行1分钟。
(4)按下停止按纽时,泵1、2停。
3.设计要求
根据要求,写出梯形图及指令表。
题目十二节日礼花弹引爆系统
1.任务简介
设计一节日礼花弹引爆程序。
礼花弹用电阻点火引爆器引爆。
为实现自动引爆,以减轻工作人员频繁操作的负担,保证安全,提高动作的准确性。
2.工作方式
按两种程序控制:
(1)1--12个礼花弹,每个引爆间隔为0.1S;13--14个礼花弹,每个引爆间隔为0.2s。
(2)1—6个礼花弹引爆间隔为O.1S,引爆完后停lOs,接着7—12个礼花弹引爆,间隔为0.1S,引爆完后又停lOs,接着13—18个礼花弹引爆,间隔为0.1s,引爆完后再停lOs,接着19—24个礼花弹引爆,间隔为0.1S。
引爆用一个引爆起动开关控制。
3.设计要求
根据要求,写出梯形图及指令表。
题目十三盐、碱分离系统
1.任务简介
在氯碱生产中,碱液的蒸发、浓缩过程往往伴有盐的结晶,因此需要采取措施对盐、碱进行分离,目前大部分厂家均采用以离心机为主体的分离系统。
2.工作方式
分离过程是一顺序循环过程,共分6个工步:
进料、甩料、洗盐、升刀、间歇、清洗,靠6个电磁阀完成上述动作,并要求前5个工作连续循环8次后方可进入清洗工步,待清洗完毕后再进入下一次大循环。
分离过程的流程图如图所示。
3.设计要求
根据要求,画出控制系统状态转移图,写出梯形图及指令表。
题目十四冲床工作系统
1.任务简介
冲床工作示意图如图所示。
初始状态时,机械手在最左边,左限位开关X4接通,冲头在最上面,上限位开关X3接通;机械手松开(YO断开)。
2.工作方式
其工作过程如下:
(1)按下起动按纽,YO接通,机械手夹紧工件并保持。
(2)1S后Y1接通,机械手右行。
(3)机械手右行到位接通右限位开关X1,冲头下行(Y3接通),加工工件。
(4)工件加工后,下限位开关X2接通,冲头上行(Y4接通),上行到位时,上限位开关X3接通,冲头回到初始位置。
(5)机械手左行(Y2接通)。
(6)机械手左行到位,接通左限位开关X4,机械手松开工件(YO断开),机械手回到初始状态。
3.设计要求
冲床要求设置单周期和自动连续两种操作方式。
画出控制系统状态转移图,写出梯形图和语句表。
题目十五燃油控制系统
1.任务简介
燃油经燃油预热器预热,由喷油泵经喷油口打入锅炉进行燃烧。
燃烧时,鼓风机送风,喷油口喷油;点火变压器接通(子火燃烧);瓦斯阀打开(母火燃烧),将燃油点燃。
点火完毕,关闭子火与母火,继续送风、喷油,使燃烧继续。
锅炉的进水、排水分别由进水阀、出水阀执行。
上、下水位分别由上限、下限水位开关检测。
蒸汽压力由蒸汽压力开关检测。
2.工作方式
控制要求如下:
(1)起动:
该锅炉的燃烧按一定时间间隔顺序起燃。
其起燃顺序为:
燃油预热,1分钟后送风,同时子火、母火燃烧;5秒后,喷油;再过5秒,子火、母火关闭,起动过程结束。
(2)停止:
停止燃烧时,要求:
燃油预热、喷油关闭,送风(将杂质、废气吹去);20秒后,送风停止(清炉停止)。
(3)异常状况自动关火:
锅炉燃烧过程中,当出现异常状况时(即蒸气压力超过允许值,或水位超过上限,或水位低于下限),能自动关火进行清炉;异常状况消失后,又能自动按起燃顺序重新点火燃烧。
即:
异常状况时,进行清炉过程(燃油预热、喷油关闭,送风);间隔20秒,清炉停止,若异常状况消失,则开始起燃过程。
(4)锅炉水位控制:
锅炉工作起动后,当水位低于下限时,进水阀打开,排水阀关闭;当水位高于上限时,排水阀打开,进水阀关闭。
3.设计要求
根据要求,写出梯形图及指令表。
题目十六金属压铸机
1.任务简介
金属压铸机工作示意图如图所示,压铸机的动作由液压油缸推动,执行元件为电磁阀。
2.工作方式
其工艺流程如下:
(1)原位:
模板在开模确认位置,开模确认限位开关SQ2闭合;洗模嘴上升归位,喷嘴归位限位开关SQ5闭合。
(2)关模:
有起动信号按下后,关模电磁阀YVO通电,模板右移。
(3)射出:
当模板右移到位,关模确认限位开关SQ3闭合,射出电磁阀YV5通电,射出活塞左移,将金属射入模内。
(4)冷却:
射出活塞自动归位,射出确认限位开关SQ4闭合,冷却电磁阀YV4通电,利用冷却水成型。
(5)开模:
延时5S待工件冷却后,开模电磁阀YV1通电,模板左移,工件自动顶出。
(6)洗模:
模板左移到位,开模确认限位开关SQ2闭合,喷嘴下移电磁阀YV2、喷嘴液电磁阀YV3均通电,喷嘴下移并喷洗模液。
(7)复位:
喷嘴下移到位,喷嘴下限限位开关SQ6闭合,喷嘴上移电磁阀通电,喷嘴上升回原位。
压铸机有两种操作方式:
(1)单周期操作:
按下起动按纽,压铸一个工件,即经过关模、射出、冷却、开模、洗模、复位一个循环后,等待下一次起动信号来,再压铸一个工件。
(2)自动连续操作:
按下起动按纽,自动循环作业,连续压铸工件,直至停止按纽按下,才停止作业。
3.设计要求
根据要求,画出控制系统状态转移图,写出梯形图及指令表。
要求:
1、了解被控对象的功能和生产过程对控制系统的要求,确定PLC控制系统的总体设计方案。
2、根据信号类型,确定PLC选型与硬件配置,并设计外围接线图。
3、在硬件设计基础上,通过控制程序的设计完成系统的各项控制功能。
4、对设计的控制程序进行模拟调试及修改,保证系统工作正常、安全、可靠。
5、系统调试完成后,根据(模拟)调试的结果,整理出完整的技术文件,如硬件接线图、功能图表、带注释的梯形图,以及必要的文字说明等,最终完成设计说明书一篇,应具备中文摘要、关键词、参考文献等。
题目十七基于单片机的单容水箱液位PID控制系统设计
基于单片机的单容水箱液位PID控制系统,主要内容包括单容水箱液位控制系统的设计,单容水箱的数学建模,单片机数据采集和上位机软件的通讯和PID参数的设定。
要求:
1.掌握单容水箱的数学模型及其阶跃响应曲线。
2.熟悉单回路反馈控制系统的组成和工作原理。
3.研究系统分别用P、PI和PID调节器的阶跃响应。
4.定性的分析P、PI和PID调节器的参数变化对系统性能的影响。
目录下所列的课程设计题目,是为加强实践环节,提高学生的自动控制系统设计及编程和调试能力所设,供同学们选择。
课程设计比较灵活,主要就是三个步骤:
1.学生分组、选题。
2.学生回去完成设计,填写好任务书,写好设计报告。
3.老师填写成绩。
注意:
每组不能超过3人;不能抄袭,否则抄与被抄的都打低分或不及格;不同老师旗下的同学不能混合组队;同一个老师的指导下,每个题目最多只能出现2次,重复过多的务必调剂。
 升级会员
升级会员 