单回路自动调节系统的整定.docx
《单回路自动调节系统的整定.docx》由会员分享,可在线阅读,更多相关《单回路自动调节系统的整定.docx(14页珍藏版)》请在冰豆网上搜索。
单回路自动调节系统的整定
实验三单回路自动调节系统的整定
一、实验目的
a)熟悉单回路调节系统的整定方法;
b)了解调节器参数对调节过程的影响。
二、实验内容
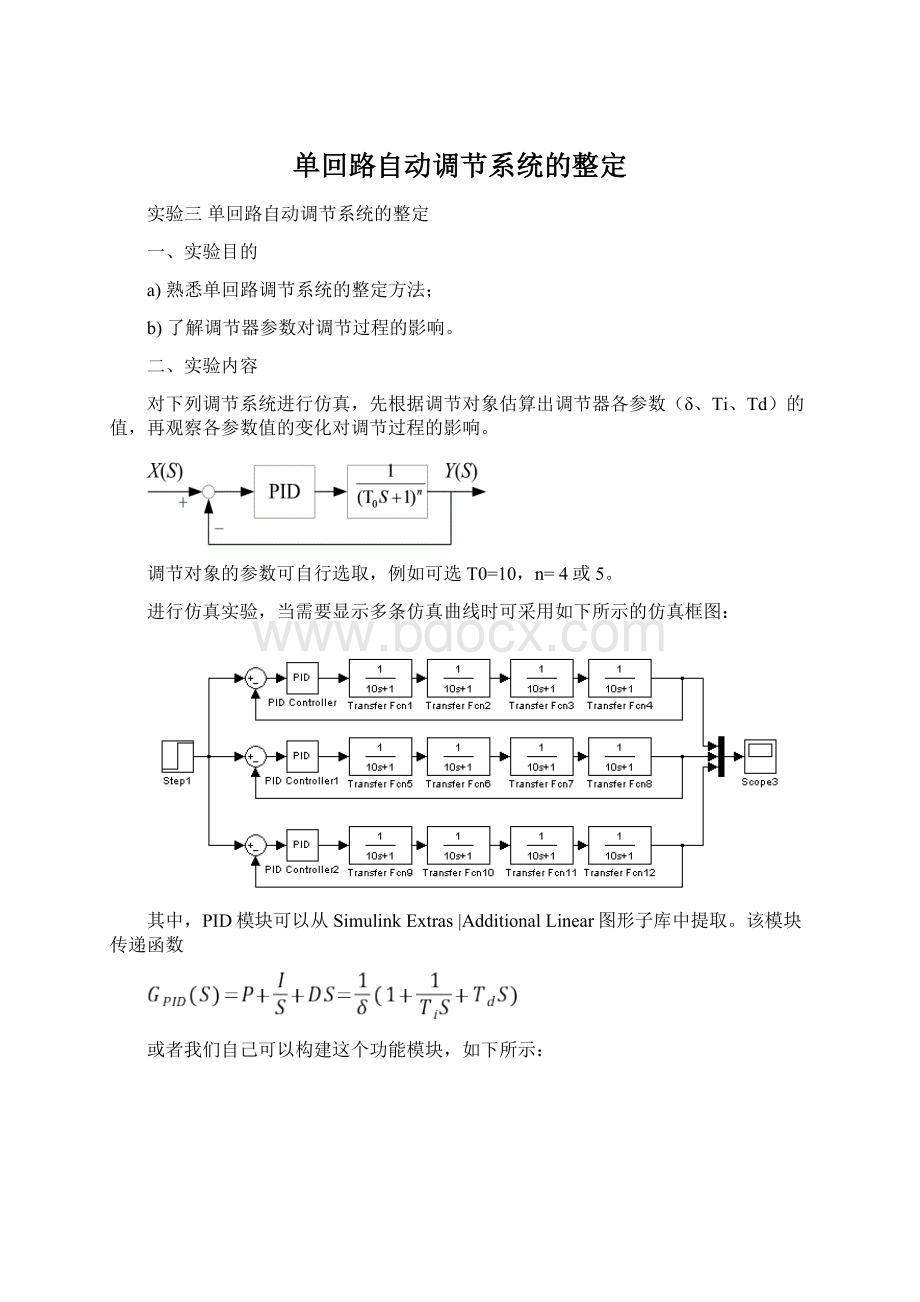
对下列调节系统进行仿真,先根据调节对象估算出调节器各参数(δ、Ti、Td)的值,再观察各参数值的变化对调节过程的影响。
调节对象的参数可自行选取,例如可选T0=10,n=4或5。
进行仿真实验,当需要显示多条仿真曲线时可采用如下所示的仿真框图:
其中,PID模块可以从SimulinkExtras|AdditionalLinear图形子库中提取。
该模块传递函数
或者我们自己可以构建这个功能模块,如下所示:
单回路调节系统的整定方法主要有临界比例带法、图表整定法和衰减曲线法等,下面介绍其中两种,可任选其中一种方法进行实验。
1.临界比例带法
临界比例带法是在纯比例作用下将系统投入闭环运行,不断改变比例带δ的数值使调节系统产生等幅振荡,并记录对应的临界比例带δc和临界振荡周期Tc。
然后根据δc和Tc得到系统所希望的衰减率时的其它整定参数。
具体整定步骤如下:
(1)设置调节器整定参数Ti→∞,Td=0,δ置于较大的数值后,将系统投入闭环运行。
(2)系统运行稳定后,适量减小比例带的数值并施加阶跃扰动,观察被调量的变化,直到出现等幅振荡为止。
记录此时的临界比例带δc和临界振荡周期Tc。
(3)根据临界比例带δc和临界振荡周期Tc,调节器中的整定参数可按下式计算:
(i)P调节器:
δ=2δc;
(ii)PI调节器:
δ=2.2δc,Ti=0.85Tc;
(iii)PID调节器:
δ=1.67δc,Ti=0.5Tc;Td=0.25Ti。
所列的计算公式是按衰减率ψ=0.75时为依据的。
根据调节系统采用不同的调节器类型,选用不同的计算公式,求出整定参数。
(4)将计算出的各整定参数值设置到调节器中,对系统作阶跃扰动试验,观察被调量的阶跃响应,适当修改各整定参数,直到满意为止。
2.图表整定法
图表整定法是通过被调对象阶跃响应曲线的特征参数,经查图表求取调节器各整定参数的。
它适用于典型的多容热工被调对象,图表见附表1和附表2。
采用图表整定法首先对被调对象作阶跃扰动试验,记录阶跃响应曲线,求取阶跃响应曲线上的特征参数:
自平衡率ρ、飞升速度ε、迟延时间τ和时间常数Tc,然后通过附表1或附表2的计算公式计算调节器的各整定参数。
表中的计算公式是依据衰减率ψ=0.75制定的,若需要得到其它衰减率数值,计算公式要进行修正。
表中的计算公式适用于阶数较高的被调对象,对于一阶和二阶的被调对象,计算得到整定参数投入运行后将具有较大的衰减率(ψ>0.75)。
三、实验结果
(1)根据整定法求得
P调节器:
δ=0.5
PI调节器:
δ=0.55;Ti=82.45
PID调节器:
δ=0.4175;Ti=48.5Td=12.125
利用计算得到的调节器参数进行仿真
仿真曲线(P、PI、PID对应的三条曲线):
性能指标:
P调节器:
衰减率ψ=(M1-M3)/M1=(0.971-0.762)/(0.971-0.667)=0.685
超调量Mp=(Ymax-Y∝)/Y∝=(0.971-0.667)/0.667=0.456
动态偏差Emax=0.971-1=-0.029
静态偏差E∝=0.667-1=0.333
峰值时间tp=65s,调节时间ts=257s
PI调节器:
衰减率ψ=(M1-M3)/M1=(1.261-1.084)/(1.26-1)=0.677
超调量Mp=(Ymax-Y∝)/Y∝=(1.261-1)/1=0.261
动态偏差Emax=1.261-1=-0.261
静态偏差E∝=1-1=0
峰值时间tp=82s,调节时间ts=285s
PID调节器:
衰减率ψ=(M1-M3)/M1=(1.352-1.072)/(1.352-1)=0.795
超调量Mp=(Ymax-Y∝)/Y∝=(1.352-1)/1=0.352
动态偏差Emax=1.352-1=0.352
静态偏差E∝=1-1=1
峰值时间tp=79s,调节时间ts=210s
(2)改变PID调节器参数进行仿真
(i)保持Ti、Td不变,改变δ:
1/Δ=2,1/δ=2.4,1/δ=4
仿真曲线(至少三条):
(ii)保持δ、Td不变,改变Ti:
1/Ti1=2;1/Ti2=2.4;1/Ti3=4
仿真曲线(至少三条):
(iv)保持δ、Ti不变,改变Td:
Td1=5,Td2=12.125,Td3=25
仿真曲线(至少三条):
四、实验小结
P调节器:
从调节过程中可知,δ增大,会使衰减加快,振荡减弱,但是静态偏差会加大,调节作用变小。
所以,应在保证系统的稳定下选择适当的衰减率。
PI调节器:
从调节中可以发现,无论怎么调节,系统的静态偏差都为0。
当积分时间减小,消除静态偏差的能力就越强,积分时间变大,会使振荡加剧,衰减率下降。
PID调节器:
通过微调,可以改变动态品质,使衰减率增加。
从这次试验,我对P、PI、PID调节器的特性有了更加的理解。
这也解决了我在自动调节学习中的很多疑点,以后要更加深入的学习此软件。
实验四三冲量双回路汽包给水调节系统的整定
一、实验目的
1.学会复杂系统的分析整定;
2.熟悉汽包给水自动调节系统整定的步骤;
3.了解PI调节器参数及分流系数对调节过程的影响。
二、实验内容
汽包给水三冲量自动调节系统方框图,如下所示。
图中,H、D、W分别为汽包水位、蒸汽流量和给水流量;Go1(s)、Go2(s)分别为给水流量和蒸汽流量对汽包水位的传递函数:
,
;
γD、γW、γH分别为蒸汽流量D、给水流量W和汽包水位H测量变送器的传递系数,γD=γW=0.083,γH=0.033;αD、αW分别为蒸汽流量和给水流量的分流系数,αD=αW=0.21;KZ、Ku分别为执行机构和阀门的特性系数,KZ=10,Ku=2。
要求分别对三冲量汽包给水自动调节系统的内外回路进行整定,并进行计算机仿真。
系统中存在内、外两个闭合回路。
内回路是由给水流量信号W局部反馈构成,外回路是由汽包水位信号H反馈到系统调节器输入端构成的。
蒸汽流量信号D只是引入的前馈信号,在系统中该信号并没有形成闭合回路,前馈调节不会影响系统的稳定性,在整定调节系统时,只需要对两个闭合回路进行稳定性的分析。
整定的具体步骤如下:
1.内回路的整定
内回路方框图如下所示。
内回路系统的闭环传递函数为
在内回路中有三个可以改变的参数:
比例带δ、积分时间Ti和给水流量侧的分流系数αw,可以把αw归纳到调节器中构成一个等效调节器,等效调节器的传递函数为
等效调节器的等效比例带为
在整定内回路时,先对αw任意选取一个数值(如:
αw=1),然后通过试验来改变δ和Ti的值,一般取Ti为5-10秒,再调整δ值直到满意为止,即把内回路整定为一个能迅速消除自发性内部扰动的快速随动系统。
整定得到的结果是Ti数值和δ/αw的比值,整定时αw只是一个任意选取的值,在整定外回路时αw是一个唯一的整定参数,一旦αw有了确定的数值后,δ也要随之改变,以保证δ/αw比值不变(即:
内回路特性不因为αw的改变而改变)。
2.外回路的整定
调节器参数可以设置得较小,使内回路成为快速随动系统,即:
或
。
去除不影响调节系统稳定性的前馈信号通道,可得到外回路系统方框图,如下所示。
外回路已可以看作是一个单回路调节系统,可采用整定单回路调节系统的方法来整定外回路。
内回路在外回路中相当于处在调节器的位置,因此,外回路调节器的传递函数为:
外回路的调节器实际上是一个比例调节器,它的等效比例带为
因为
是一个确定的常数,所以外回路的稳定性及其它性能完全由
来决定。
整定外回路时,可采用工程整定法来整定参数,得到
值。
如果利用图表法整定,首先通过试验获得广义被调对象的阶跃响应曲线(广义被调对象的输入信号为给水流量W,输出信号是水位侧差压变送器的输出值)。
求得ε和τ的数值,查图表求取整定参数。
可求出
根据外回路整定得到的
值,可求出调节系统比例积分调节器中的比例带δ值。
3.蒸汽流量侧
的选择
要使静态偏差为零,静态时必须满足ID=IW,即:
在正常运行时,可认为D=W,γD=γW,则有
αD=αW
因此,为了克服静态偏差,蒸汽流量侧分流器的分流系数αD必须等于给水流量侧分流器的分流系数αW。
三、实验结果
1、内回路:
(1)整定得:
Ti=6δ/αw=0.015
(2)仿真曲线:
2、外回路:
(1)整定得:
αw=0.3δ=20αD=0.3
(2)仿真曲线:
(3)性能指标:
衰减率ψ=(M1-M3)/M1=(37-31)/(37-30)=0.857
超调量Mp=(Ymax-Y∝)/Y∝=(37-31)/30=0.2
动态偏差Emax=37-1=36
静态偏差E∝=30-1=29
峰值时间tp=83s,调节时间ts=215s
3、整个回路的系统整定和微调
(1)W为输入信号,仿真曲线如下
性能指标:
衰减率ψ=(M1-M3)/M1=(10.5-0.7)/(10.5-0)=0.93
动态偏差Emax=10.5-1=9.5
静态偏差E∝=0-1=-1
峰值时间tp=46s,调节时间ts=249s
H为输入信号,仿真曲线如下
性能指标
衰减率ψ=(M1-M3)/M1=(37-31)/(37-30)=0.857
超调量Mp=(Ymax-Y∝)/Y∝=(37-31)/30=0.2
动态偏差Emax=37-1=36
静态偏差E∝=30-1=29
峰值时间tp=90s,调节时间ts=200s
D为输入信号,仿真曲线如下
性能指标
衰减率ψ=(M1-M3)/M1=(1.8-0.2)/(1.8-0)=0.889
动态偏差Emax=1.8-1=0.8
静态偏差E∝=0-1=-1
峰值时间tp=37s,调节时间ts=207s
四、实验小结
从试验过程中,多次调节参数δ、αw、T,其数值的变动不影响系统的稳定性,只影响速度,在保证系统的稳定时,内回路越快越好。
D的调节起前馈的作用,动态偏差小,就是防止虚假水位。
而W的调节时的衰减率大,用于克服内扰,实现粗调。
从这次试验我更加了解到这软件对电厂自动调节的重要性,要好好学习,努力掌握此软件的操作技术,为以后的工作打下好的基础。
 升级会员
升级会员 