第1章 履带车辆行驶理论.docx
《第1章 履带车辆行驶理论.docx》由会员分享,可在线阅读,更多相关《第1章 履带车辆行驶理论.docx(7页珍藏版)》请在冰豆网上搜索。
第1章履带车辆行驶理论
第1章 履带车辆行驶理论
1.1 履带车辆行驶原理
履带车辆的行驶原理可以通过履带行走机构来进行分析。
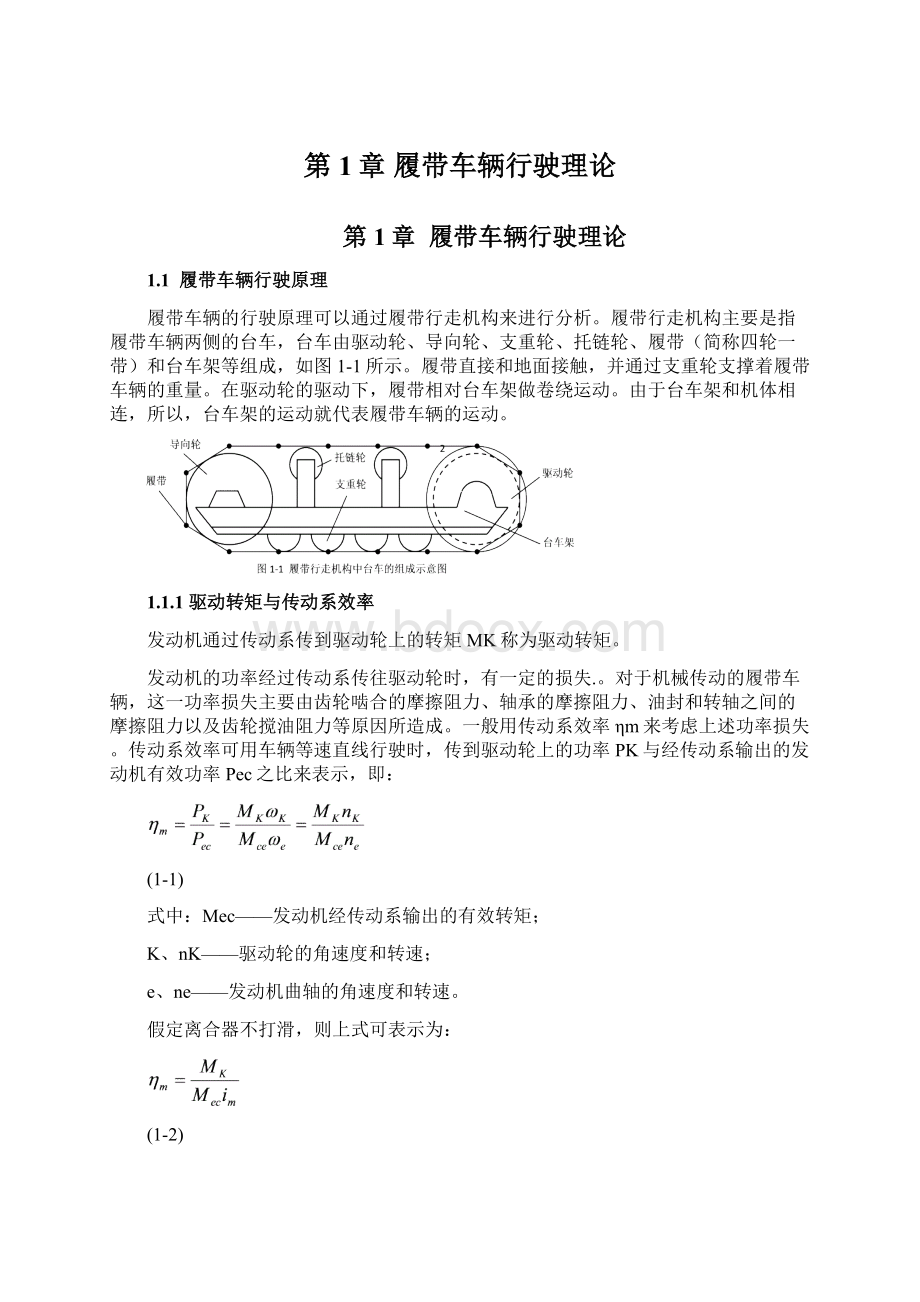
履带行走机构主要是指履带车辆两侧的台车,台车由驱动轮、导向轮、支重轮、托链轮、履带(简称四轮一带)和台车架等组成,如图1-1所示。
履带直接和地面接触,并通过支重轮支撑着履带车辆的重量。
在驱动轮的驱动下,履带相对台车架做卷绕运动。
由于台车架和机体相连,所以,台车架的运动就代表履带车辆的运动。
1.1.1驱动转矩与传动系效率
发动机通过传动系传到驱动轮上的转矩MK称为驱动转矩。
发动机的功率经过传动系传往驱动轮时,有一定的损失.。
对于机械传动的履带车辆,这一功率损失主要由齿轮啮合的摩擦阻力、轴承的摩擦阻力、油封和转轴之间的摩擦阻力以及齿轮搅油阻力等原因所造成。
一般用传动系效率ηm来考虑上述功率损失。
传动系效率可用车辆等速直线行驶时,传到驱动轮上的功率PK与经传动系输出的发动机有效功率Pec之比来表示,即:
(1-1)
式中:
Mec——发动机经传动系输出的有效转矩;
K、nK——驱动轮的角速度和转速;
e、ne——发动机曲轴的角速度和转速。
假定离合器不打滑,则上式可表示为:
(1-2)
式中:
im——传动系的总传动比,它是变速箱、中央传动和最终传动各部分传动比的乘积,即:
im=e/K=ne/nK=igi0is (1-3)
式中:
ig——变速箱某挡的传动比;
i0——主减速器的传动比;
is——轮边减速器的传动比。
由式(1-2)可知,当车辆在水平地面上作等速直线行驶时,其驱动转矩MK可由下式求得:
MK=ηmimMec (1-4)
对于液力机械传动的履带车辆,将上述公式中的Pec和Mec换成涡轮轴上的功率PT和转矩MT即可。
1.1.2履带车辆的行驶原理
为了便于说明履带车辆的行驶原理,可将履带分成如图1-2所示的几个区段。
1~3为驱动段,4~5为上方区段,6~8为前方区段,8~1为接地段或称支承段。
当履带车辆行驶时,在驱动转矩MK作用下,履带相对台车架做卷绕运动,同时,驱动段内产生拉力Ft,Ft的大小等于驱动转矩MK与驱动轮动力半径rK之比,即Ft=MK/rK。
对履带车辆来说,拉力Ft是内力,它力图把接地段履带从支重轮下拉出,使接地段履带板有相对地面运动的趋势,从而使地面土壤产生剪切变形或因履刺产生挤压变形,地面因抵抗变形而对接地段履带板产生方向与车辆行驶方向相同的反作用力,这些反作用力的合力FK就是推动履带车辆前进的驱动力。
FK称为履带车辆的切线牵引力。
由于动力从驱动轮经驱动段传到接地段时,中间有动力损失(主要是后支重轮在履带上滚动的阻力和该支重轮轴承间的摩擦阻力造成的损失以及履带销子和销孔间的摩擦损失),如果此损失用履带驱动段效率ηr来考虑,则履带车辆的切线牵引力FK可表示为:
FK=ηrFt=ηrηmimMe/rK (1-5)
式(1-5)也适用于轮式车辆,不过此时ηr=1。
为了分析驱动力FK是如何传到履带车辆机体上的,如图1-3所示,我们在驱动轮轴上加两个大小相等,方向相反的力Ft,其中一个力与驱动段内拉力Ft形成力偶,其值等于驱动转矩MK;另一个力则可分解成平行于路面和垂直于路面的两个分力Ft和Ft。
其中Ft=Ftcosψ。
同理,将作用在后支重轮上的两个力(一个是驱动段内的拉力Ft,另一个是土壤的反作用力FK)都移到该支重轮的轴线上。
结果,得到一个合力FΣ。
将合力FΣ分解成平行于路面和垂直于路面的两个分力FΣ和FΣ,而FΣ=FK-Ftcosψ。
推动机体前进的力应该是Ft与FΣ之和,即:
Ft+FΣ=Ftcosψ+FK-Ftcosψ=FK (1-6)
式(1-6)表明,土壤对接地段履带板产生的与路面平行的反作用力合力FK就是推动机体前进的力。
假定履带销子和销孔间的摩擦损失等可略去不计,则推动机体前进的力FK等于履带驱动段内的拉力Ft,它并不随驱动段的倾角ψ的变化而变化。
实际上,因为履带销和销孔间有摩擦,故FK比Ft要小些。
1.2 履带行走机构运动学分析和力学分析
1.2.1履带行走机构的运动学分析
现在来讨论履带行走机构在水平地面上作等速直线行驶时的运动学问题。
履带行走机构在水平地面的直线运动,可以看成是台车架相对于接地履带的相对运动和接地履带对地面的滑转运动(牵连运动)合成的结果。
根据相对运动的原理,台车架相对接地履带的运动速度与履带相对于台车架的运动速度,在数值上应相等,在方向上则相反。
因此,我们完全可以假设台车架静止不动,并依此来考察履带与台车架之间的相对运动速度。
此时可将台车架以及驱动轮、导向轮、支重轮、托链轮的轴线看成是静止不动的,而履带则在驱动轮的带动下以一定的速度围绕着这些轮子作“卷绕”运动(图1–4)。
由于履带是由一定长度的链轨节所组成的,与通常的链传动一样,即使驱动轮做等速旋转,履带的卷绕运动速度亦不是一个常数。
从图1-4中可以看到,当履带处于图中a所示的位置时,履带速度达到最大值,其数值为:
υ1=r0K (1-7)
式中:
r0——驱动轮的节圆半径;
K——驱动轮的角速度。
当履带处于图中b所示的位置时,履带速度最低,其数值为:
υ2=r0Kcos(/2)=υ1cos(/2) (1-8)
式中:
——驱动轮的分度角,=360/zK;
zK——驱动轮的有效啮合齿数。
由此可见,即使驱动轮做等角速旋转(K=常数),台车架的相对运动也将呈现周期性的变化,从而使车辆的行驶速度也带有周期变化的性质。
但是,我们用肉眼一般观察不到这种周期变化。
履带卷绕运动的平均速度可通过驱动轮每转一圈所卷绕链轨节的总长来计算。
设:
1t为链轨节距(m),K为驱动轮角速度(1/s),nK为驱动轮转速(r/min),则履带卷绕运动的平均速度υm可由下式计算,
υm=zK1tK/2=zK1tnK/60(m/s) (1-9)
当履带在地面上作无滑动行驶时,车辆的行驶速度就等于台车架相对于接地履带的运动速度,后者在数值上等于履带卷绕运动的速度。
通常,将履带在地面上没有任何滑移时,车辆的平均行驶速度υT称为理论行驶速度,它在数值上应等于履带卷绕运动的平均速度,亦即:
υT=zK1tK/2=zK1tnK/60(m/s) (1-10)
由式(1-8)可知,当角减小,亦即驱动轮的啮合齿数zK增加时,则履带卷绕运动速度的波动就减小。
对于0,zK∞这一极限情况,则有:
υ1=υ2=υm。
这表明,当驱动轮啮合齿数增加时,履带卷绕运动的速度趋近于其平均速度,并趋向于一个常数。
为了简化履带行走机构的运动学分析,通常将这种极限状态作为车辆行驶速度的计算依据。
此时,假设履带节为无限小,因此,履带可以看成是一条挠性钢带。
这一挠性钢带既不伸长也不缩短,且相对于驱动轮无任何滑动。
根据上述假设,履带就具有图1-5所示的形状。
当驱动轮齿数相当多时,此种假设是可以容许的。
这样,当驱动轮作等角速度旋转时,履带卷绕运动的速度,也就是车辆的理论行驶速度,可用下式表示(见图1-5):
υT=rKK (1-11)
式中:
υT——车辆的理论行驶速度;
rK——驱动轮的动力半径;
K——驱动轮的角速度。
式(1-11)中的rK是从运动学的角度提出来的,确切地讲,应该称之为驱动轮的滚动半径。
所谓动力半径是切线牵引力作用线到驱动轮轴线的距离。
但对于履带行走机构来说,驱动轮的滚动半径和动力半径接近一致,故无论作运动学分析或力学分析时均使用rK,并统称为动力半径。
驱动轮的动力半径rK是一个假设的半径,它在驱动轮上实际并不存在(rK不等于链轮的节圆半径),其物理意义可解释如下:
在驱动轮相对于履带没有滑转的情况下,以一半径为rK的圆沿履带作纯滚动时,驱动轮轴心的速度即为车辆的理论行驶速度。
由表达式(1-10)和(1-11)可知:
rK=zK1t/2 (1-12)
当车辆在实际工作时,即使牵引力没有超过履带与地面的附着能力,履带与地面之间也存在着少量滑转,这是因为履带剪切或挤压土壤而使土壤产生变形的缘故。
在履带存在滑转的情况下,车辆的行驶速度υ称为实际行驶速度,它是履带的滑转速度和台车架与接地履带之间的相对速度的合成速度,亦即:
υ=υT-υj (1-13)
式中:
υj——履带在地面上的滑转速度。
实际行驶速度υ可以用单位时间内车辆的实际行驶距离来表示;滑转速度υj则可用单位时间内的滑转距离来表示,即:
(1-14)
式中:
l——在时间t内,车辆的实际行驶距离;
lj——在同一时间t内,履带相对地面的滑转距离;
lT——在同一时间t内,车辆的理论行驶距离,它可通过下式计算:
lT=rKKt=zK1tKt/2 (1-15)
通常用滑转率来表示履带相对地面的滑转程度,它表明了由于滑转而引起的车辆行程或速度的损失,并可由下式计算:
(1-16)
由于车辆在空载行驶时滑转率极小(≈0),因此常常用车辆的空载行驶距离10和空载行驶速度υ0来代表理论行驶距离和理论行驶速度。
这样,公式(1-16)即可改写成如下形式:
(1-17)
式(1-17)在做滑转率试验时非常有用。
1.2.2履带行走机构的力学分析
现在来讨论履带车辆在水平地面上作等速直线行驶时的力学问题。
当履带车辆在等速稳定工况下工作时,其上作用着抵抗车辆前进的各种外部阻力和推动车辆前进的驱动力——切线牵引力。
下面我们将从履带车辆整体和履带自身两个方面来考察其力学关系。
1.将车辆作为一个整体来考察(图1-6)
此时,作用在履带车辆上的各种外部阻力应与切线牵引力相平衡,亦即:
ΣF=FK (1-18)
式中:
ΣF——各种外部阻力的总和;
FK——切线牵引力。
2.对履带单独进行考察(图1-7)
 升级会员
升级会员 