FANUC系统培训教案.docx
《FANUC系统培训教案.docx》由会员分享,可在线阅读,更多相关《FANUC系统培训教案.docx(111页珍藏版)》请在冰豆网上搜索。
FANUC系统培训教案
开始讲PMC
数控系统除了对机床各坐标轴的位置进行连续控制(即插补运算)外,还需要对机床主轴正反转与起停,工件的夹紧与松开,刀具更换,工位工作台交换,液压与气动控制,切削液开关,润滑等辅助工作进行顺序控制,顺序控制由可编程控制器完成,由于发那科PLC和机床系统做成一体,为内装型,称为PMC.
发那科PMC分为:
PMC-L/MPMCSA1/SA2/SA3SB7等几个版本,要注意你的机床上所用的版本,在PMC的PMCDGN中显示
PMC程序特点:
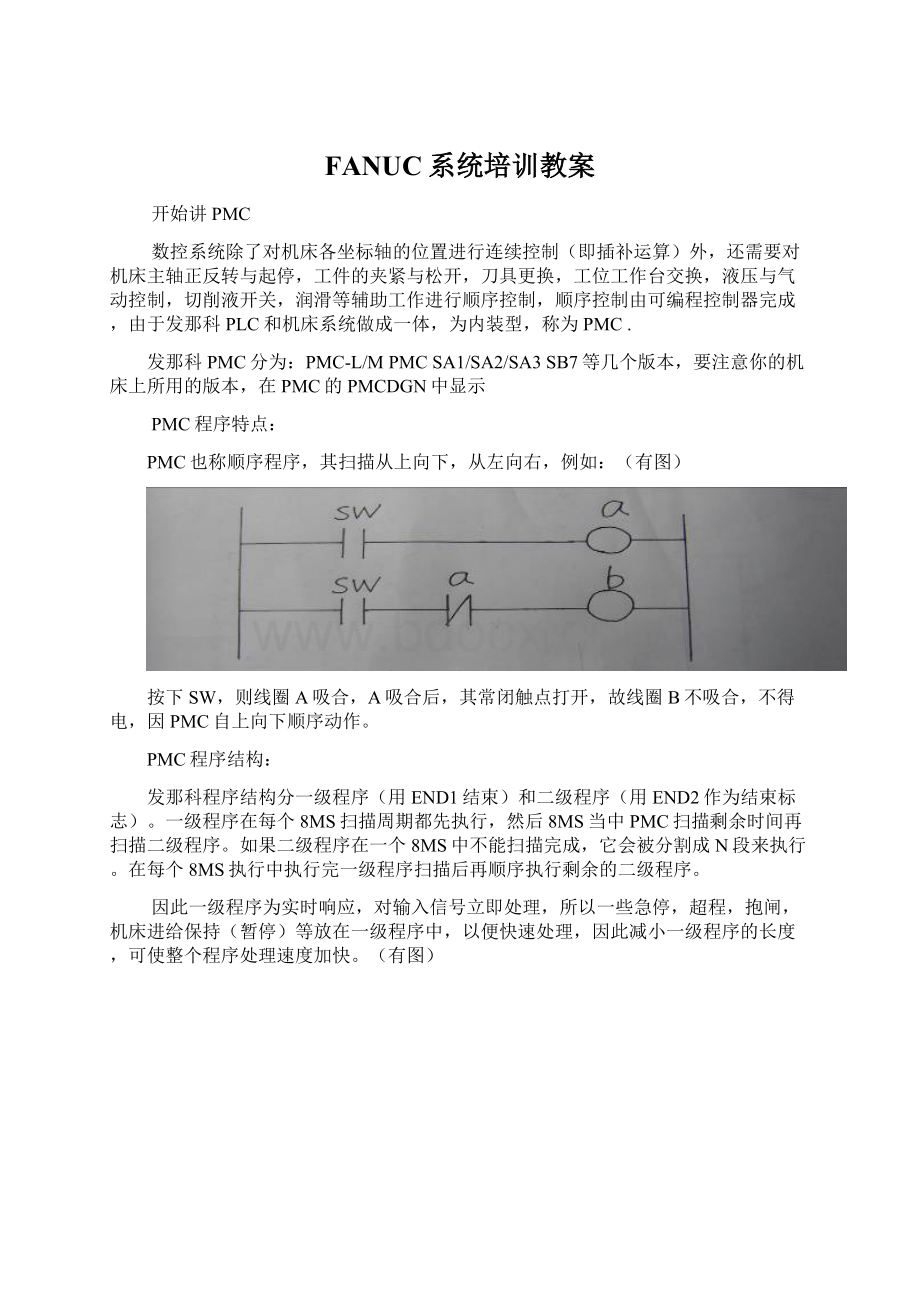
PMC也称顺序程序,其扫描从上向下,从左向右,例如:
(有图)
按下SW,则线圈A吸合,A吸合后,其常闭触点打开,故线圈B不吸合,不得电,因PMC自上向下顺序动作。
PMC程序结构:
发那科程序结构分一级程序(用END1结束)和二级程序(用END2作为结束标志)。
一级程序在每个8MS扫描周期都先执行,然后8MS当中PMC扫描剩余时间再扫描二级程序。
如果二级程序在一个8MS中不能扫描完成,它会被分割成N段来执行。
在每个8MS执行中执行完一级程序扫描后再顺序执行剩余的二级程序。
因此一级程序为实时响应,对输入信号立即处理,所以一些急停,超程,抱闸,机床进给保持(暂停)等放在一级程序中,以便快速处理,因此减小一级程序的长度,可使整个程序处理速度加快。
(有图)
由图可见一级程序短,占用的扫描时间少,故可用较多时间多执行二级程序,则整个程序执行时间会缩短。
PMC信号分析
X为机床到PMC的输入信号,地址有固定和设定两种,对应面板按扭以及各种开关等。
Y为PMC给机床的输出信号,地址同样有固定和设定两种,通常输出控制小继电器,再去控制大接触器,控制电机或各种电磁阀。
F为CNC到PMC的信号,主要包括各种功能代码MST的信息,(即M辅助功能,S转速和T选刀功能)手动/自动方式及各种使能信息,每种含义都是固定的,是发那科公司都定义好的,我们只能使用,不使赋值,不能当线圈用,只能是触点,如当读到编写加工程序中M代码时S500M03,CNC会发出F7.0为1信号,M功能选通信号,我们只能使用F7.0的状态,不能用梯图使F7.0为1或0是错误。
(有图)
图示为刹车线圈电路图
G为PLC到CNC侧的信号,主要包括MST功能的应答信号和各坐标轴对应的机床参考点等
G代码地址是固定的,是发那科公司定义好的,但是与F信号不同的是可以在梯图中当线圈使用,当然更可以当触点用,如(有图)
主轴急停
G信号以以当线圈时,即我们可以在梯图中使其置1导通或置0截止(失电)
作为初学者一定要搞清加工程序中G代表插补指令,F代表进给速度,而在梯形图中,GF分加别代表PLC和CNC之间控制信号,请大家记牢。
若遇到F信号触点不闭合,只能考虑条件不满足导致CNC没有应答信号,不要试图强制导通它。
信号的一些常见问题:
1.正负逻辑问题。
正逻辑,高电平有效,低电平无效。
负逻辑,高电平无效,低电平有效。
在发那科系统中,负逻辑信号前面带有*,如急停信号*ESP,*ESP为符号(SYMBOL)前面有*表示低电平有效,其地址(ADDRESS)为G8.4,当G8.4为0时,急停命令有效,机床处于急停状态。
换言之,要使机床处于正常状态,必须使G8.4为1,其对应线圈应吸合。
一个信号有两种表达方式,符号(SYMBOL)和地址(ADDRESS)
符号有助于理解信号意义,通常是用英文简写信号含义。
如G8.4是地址*ESP是符号
2.常开点和常闭点
X输入信号一般有如下两种情况,24V电源通过常开或常闭开关输入PLC(有图)
发那科中用-‖-表示常开点,(有图)表示常闭点。
用高亮度或粉红色表不信号接通,
用暗色或灰色表示信号关断。
如何理解常开和常闭何时导通,何时关断,记住一句话
有高电平输入PLC时,对应常开点闭合,常闭点断开。
对于上图,不按下ST1X0.0常开点为0
(没有高电平进入PLC)常闭点为1
按下ST1时X0.0常开点为1
(有高电平输入PLC)常闭为点0
同样对于ST2,不按下ST2时,X0.1常开点为1
(有高电平输入PLC)常闭点为0
按下ST2时,X0.1常开点为0
(没有高电平进入PLC)常闭点为1
输出Y信号,当某个输出信号接通时,输出一个触点闭合信号。
(有图)
如图,梯形图中Y10.0闭合,高亮度或粉红色,其提供一个触点信号,Y10.0触点闭合,外部KA吸合。
如果Y10.0在梯形图中吸合,却不提供一个闭合触点,说明PLC有问题。
3.输入/输出电源问题
发那科系统输入/输出型号信号电源一般为直流24V,
I/OLINK模块有单独的电源供电,电源接口部分常称为CPD1,
I/OLINK出故障首先要注意电源提供好了没有,内部保险是否烧毁
内部I/O模块X输入信号电源由外部提供,一般通过I/O板上的保险提供给标有(24V)的针脚,所有X信号从此引脚得电。
内部I/O模块Y输出信号电源一般由DOCOM脚提供,需要将外部24V电源提供给DOCOM脚,再由DOCOM分配给各个触点,然后输出给继电器或电磁阀。
PMC地址分配
字符
符号种类
种类
OI-B/OIBMATEB
PMC-SA1
PMC-SB7
X
机床给PMC的输入信号(MT→PMC)
X0-X127
X0-X127
X200-X327
X1000-X1127
Y
PMC输出给机床的信号(PMC→MT)
Y0-127
Y0-Y127
Y200-Y327
Y1000-Y1127
F
NC给PMC的输入信号(NC→PMC)
F0-F255
F0-F767
F1000-F1767
F2000-F2767
F3000-F3767
G
PMC输出给NC的信号(PMC→NC)
G0-G255
G0-G767
G1000-G1767
G2000-G2767
G3000-G3767
R
内部继电器
R0-R999
R9000-9099
R0-R7999
R9000-R9499
E
外部继电器
-
E0-E7999
A
信息显示请求信号
信息显示状态信号
A0-A24
-
A0-A249
A9000-A9249
C
计数器
C0-C79
C0-C399
C500-C5199
K
保持继电器
K0-K19
K0-K99
K900-K919
T
可变定时器
T0-T79
T0-T499
T9000-T9499
D
数据表
D0-D1859
D0-D9999
L
标志号
-
L1-L9999
P
子程序号
-
P0-P2000
其中机床侧的输入地址X中,有一些专用信号直接被CNC所读取,因为不经过PMC的处理,我们称之为高速处理信号。
例:
急停X8.4,原点减速信号X9,测量信号X4。
在内部地址中,中间继电器R9000-R1000之间的地址被系统所占用不要用于普通控制地址。
R9000.0
数据比较位,输入值等于比较值
R9000.1
数据比较位,输入值小于比较值
R9091.0/1
常0/1信号
R9091.5
0.2秒周期信号
R9091.6
1秒周期信号
R9015.0
RUN
STOP有图
R9015.1
R9015.0有图
R9091.2
R9091.2有图
R9015.0在PMC运行后,产生一个脉冲信号,作为PMC运行信号
R9015.1在PMC停止前,输出一个下降沿逻辑,作为检测PMC停止信号,在PMC停止后产生一个急停信号,
R9091.2与PMC运行同步信号
内部地址中,T0-T8作为48MS精度定时器,T9-T499作为8MS精度级,定时器在PMC画面上设定和使用。
内部地址中,C0-C399作迷为计数器在PMC画面是设定和使用。
内部地址中,K0-K99可作为普通的保持型继电器在PMC画面上设定各使用,K900-K919为系统占用区(有确定的地址含义),通常并上或串上一个K接点,可以添加或删除某种功能。
内部地址中,A0-A249作为信息,请求寄存器使用,用它产生外部的报警信息文本。
内部地址中,D0-D9999作为数据寄存器,可以在PMC进行数据交换。
内部地址中,P0-P2000为子程序号,在PMC可以通过CALL(有条件调用),CALLU(无条件调用)子程序,子程序完成一些特定的功能。
内部地址中,L1-L9999作为标志号,PMC顺序程序用,标志号进行分块,系统通过PMC的标号跳转指令JMPB或JMP跳到所指定标号的程序进行控制。
PMC基本控制电路
1.自锁回路(有图)
A按下后,C吸合
A松开后,由C的触点实现自锁
B为停止,B断开后,回路断开
2.互锁回路(有图)
在C回路中串入D的常闭点,在D回路中,串入C的常闭点,两个回路实现互锁,C和D不会同时吸合。
3.逻辑O回路(有图)
由于R0.0断电器回路永远不会常开和常闭同时吸合,故R0.0永远不会吸合,R0.0一直为0。
FANUC1618Oi中专用继电器R9091.0
4.逻辑1回路(有图)
上电时R0.0由其常闭点得电而吸合,通过其常开触点实现自锁,所以R0.1一直为1
FANUC1618Oi中有专用继电器R9091.1
5.上升沿触发脉冲信号电路(有图)
接下X2.0时,R2.0吸合,下一步,R2.1吸合,
循环下去,再执行到R2.0回路时,因R2.1为1,故R2.0断开,R2.0为一个与X2.0同步吸合的脉冲信号。
6.下降沿触发脉冲电路(有图)
分析:
按下X0.1时,R0.1吸合,R0.2断开。
松开X0.1时,由于R0.1还保持吸合,故R0.2吸合
下一步,R0.1断开,循环下去,在执行到R0.2时,
由于R0.1断开,所以R0.2失电
所以R0.2是在X0.1松开后,下降沿时产生一个脉冲信号,
7.RS触发电路(有图)
分析:
按下X0.1,后松开,R0.2产生一个脉冲信号。
Y0.1通过R0.2(常开点)和Y0.1(常闭点)吸合一下
循环执行后,通过R0.2(常闭点)和Y0.1(常开点)自锁。
再按一下X0.1,R0.2产生一个脉冲信号,将R0.2(常闭点)Y0.1(常开点)自锁回路切断,Y0.1松开。
动作结果按一下X0.1Y0.1吸合
再一下X0.1Y0.1断电
7.异或电路(有图)
C=A_B+AB_此为逻辑电路中异或回路。
AB相同电平时C为0,不吸合
AB不相同时,C为1,吸合
PMC的功能指令
数控机床的PLC指令必须要满足特殊要求,由于数控机床动作复杂,仅靠基本指令很难实现,功能指令即是实现一些特定功能的指令,其实都是一些子程序,应用功能指令就是调用相应的子程序。
一程序结束指令
|---END1----|第一级PMC程序区结束指令,第一级程序为快速执行程序区,每8MS执行一次,主要处理系统急停,超程,进给暂停等紧急动作
|---END2-----|第二级程序用来编写普通顺序程序,系统会根据第二级程序的长短分成若干段,每8MS顺序执行一段,为主程序区。
|---END------|PMC结束指令,在END和END2之间是子程序。
二.定时器指令
定时器用来定时,用于程序中需要与时间建立逻辑关系的场合,都是通电延时继电器。
分为可变定时器(TMR)和固定定时器(TMRB)
通电延时可以理解为对信号的一种确认,某个信号动作之后,相应的继电器并不立刻动作,而是延迟一定时间,信号仍旧保持,输出继电器才吸合。
如卡盘作夹紧动作,夹紧到位开关闭合后,相应继电器并不马上吸合,使主轴旋转,而是延迟一定时间,假设为1秒后,夹紧到位开关仍旧吸合,说明夹紧牢靠,输出继电器才吸合,主轴开始旋转,确保安全,
1.可变定时器(TMR)
TMR指令的定时时间可通过PMC参数中TIMER中可修改
工作原理:
当ACT=1,吸合后,延迟设定时间后,定时继电器吸合
当ACT=0,定时继电器断电,
定时器号1-8号最小单位为48MS
9号以后最小单位为8MS
定时继电器:
作为可变定时器的输出,定时继电器地址由机床厂家设计者决定,一般采用中间继电器R图示
PMCPRM(TIMER)#001
NOADDRESSDATA
001T0000
002T0020
003T0030
NO代表定时器号
DATA设定时间,单位为MS,以十进制直接设定。
2.固定定时器(TMRB)
在梯形图中设定时间,与梯形图一起存入FROM中,不能在梯形图PMC参数中改写。
一般用于固定机床时间的控制,不需要用户改写(换刀时间,润滑时间)
例:
(有图)
X0.1闭合,延时5秒钟,后50.0得电,其触点闭合,A0.0报警。
(有图)
X0.2过载信号,通常是常闭。
正常时,梯图中X0.2常开点闭合,常闭点断开,
R50.0不得电。
过载后,X0.2断开,X0.2常开点为0。
X0.2常闭点为1,
R50.0延时5秒后得电,,常开点吸合,A0.0报警。
三.计数器指令
计数器完成计数指令,可以是加计数,可以是减计数
CN0=0从0开始计数0,1,N
CN0=1从1开始计数1,2,…N
UPDOWN=0,加计数
UPDOWN=1,减计数
RST清除计数值
ACT由0变1时上开沿计数
计数器号:
其内部在PMC中PMCPRM→COUNTER
预置值占两个字节,当前计数值占两个字节
PRESET:
预置值
CURRENT:
当前值
计数器输出(W1):
当计数器为加计数器时,计数到预置值时,W1=1,当计数器为减计数器时,计数到初始值时W1=1
举例:
刀库旋转时,数刀套程序,X3.5数刀开关,每转一个刀位,X3.5点亮一次。
R0.0为0,从0开始计数,此出错,应从1开始。
R56.0为0时正转,加计数
为1时反转,减计数。
R50.0为计数脉冲,计数器中值计数
C1中记忆的是刀库当前刀座号。
所谓当前刀套即是刀库中处于等待换刀位置的刀套号。
注:
有的刀库有一正一反两个数刀开关,此时应将另一开关取其常闭点,例如X4.5,两个计数器计数作比较,相等,证明数刀正确,否则错误。
有的刀库用数刀计数器和数刀套计数器相比较,刀库旋转电机转一圈,刀套转一个刀位,两者相比较,相同正常,不同报警。
共同的目的:
防止数刀开关出故障,记错刀套号,互相参照一下。
注意:
在刀库上还有原点开关,回一次原点,则将计数器赋值一次。
X0.2原点开关,R51.0为原点脉冲
原点脉冲将计数器C1赋值为1,重新计数。
四.译码指令
数控机床执行加工程序中的MST功能时,当系统读到这些代码时,
CNC装置以BCD或二进制代码形式输出MST代码的F信号给PMC,这些信号需要PMC经过译码才能从BCD或二进制状态转换成具有特定含义的一位逻辑状态。
(M辅助功能,S主轴转速功,T刀具选择功能)
即完成数→位转换,将一个数通过译码后成为某些位变为1。
BCD译码为DEC,二进制译码DECB两种
关于码制问题在此讲一下,应该说是许多人面临的问题,大多数人不是很清楚。
二进制码
只有两个数码0和1,每一位具有特定的权
二进制整数的权是2的乘方,
二进制小数的权是2的负次方,
同样8进制的16进制,其权分别为8和16的乘方
BCD码,全称BINARY-CODED-DECIMAL
二进制编码的十进制码,总体上说是十进制,但每一位用二进制来表示,是用四位二进制码来表示。
其中常用8421-BCD码
使用了0000-1001这十种状态,其余1010-1111为禁用码。
举例:
表示数13
纯二进制为(00001101)
BCD码(00010011)
此说明一下,1个字节即8个单个位。
每一个0或1,称一个位(BIT),8位称为一个字节(BYTE)
两个字节(16位),称为一个字(WORD),32位称双字(DOUBLEWORD)。
在看发那科信号[PMC地址一览表]时一般看到1248下标时,多是BCD码形式的信号。
如S1S2S4S8
二进制码在梯图中常用0001代表一个字节(0-255)
0002代表二个字节(0-65535
0004代表四个字节(数更大)
BCD码在梯图中常用BYTE=0两位BCD码(0-99)
BYTE=1四位BCD码(0-9999)
MST功能的输出
CNC在执行加工程序时,遇到其中MST功能时,以F□□的形式输出,送给PMC执行,
M代码:
O系统中,F151,其内容M功能的BCD码
(M28M24M22M21M18M12M14M11)
1618Oi系统F10-F13,其内容为二进制M代码
(M00~M31)
加工编写的程序如遇到M13F151译出:
00010011
F10译出:
00001101
注意两者是不同的
S代码:
O系统中F152,其内容为S功能的BCD码,
(S28S24S22S21S18S14S12S11)
1618Oi系统F22-F25,内容为二进制S代码,
(S00~S31)
T代码:
O系统中,F153,其内容为T功能的BCD码
(T28T24T22T21T18T14T12T11)
1618Oi系统F26-F29,其中T功能的二进制码
(T00~F31)
下面还要讲MST选通信号,或称读信号
即CNC遇到加工程序的MST指令时,会输出相应的指令信息,
经过延时时间,通常为16MS,可以通过系统设定,还会输出一个选通信号或称之为读信号。
M选通(读M代码)信号MF
O系统F150.0
1618Oi系统F7.0
S选通(读S代码)信号SF
O系统F150.2
1618Oi系统F7.2
T选通(读T代码)信号TF
O系统F150.3
1618Oi系统F7.3
最后一个概念
对M的译码,其目的是变成一个个中间继电器线圈的吸合,去控制外部的一些动作,如液压开启,卡盘夹紧松开,门开关等。
上述铺垫完成后,讲一下DEC和DECB指令
1.DEC指令(译BCD码)
DEC指令的功能是当两位BCD码与给定值一致时,输出为“1”,不一致时输出为0,DEC指令主要用于机床的M码和T码的译码,一条DEC指令译码只能译一个M代码
格式包括以下几个部分:
控制条件ACT=0不执行译码指令
ACT=1执行译码指令
译码信号地址:
指定包含两位BCD码的信号地址
(F151F152F153O系统)
译码方式:
包括:
译码数值译码位数
译码数值即要译码的两位BCD代码(F151F152F153中的)
译码位数:
01只译低4位
10只译高4位
11高低位均译
译码输出:
指定地址的译码数与要求的译码值相等时为1,
否则为0。
(有图)
执行程序M20时,通过译码,使R50.0得电,R50.0触点吸合,Y10.1吸合,通过Y10.1提供一个触点去控制刀套上升或下降,或者液压油泵开关,可自已定义。
除一些约定俗成的M00,M01,M03,M04,M05,M08,M09,M19之外,不同厂家,其它M代码各不相同,都是自已可编写的。
2.DECB(译二进制码)
DECB指令的功能是,可对1,2或4个字节的二进制代码数据译码。
所指定的8位连续数据之一与代码数据相同时,对应的输出数据位为1,DECB主要用于MT代码的译码,一条DECB可译8个连续的MT代码。
格式有如下项:
译码格式指定:
00011个字节的二进制代码
00022个字节的二进制代码
00044个字节的二进制代
译码信号地址:
给定一个存储代码数据的地址(F10)
译码指定数:
给定要译码的8个连续数字的第一位(从何处开始译)
译码结果输出:
给定一个要输出译码结果的地址(放在哪里)
一个字节共8位,可译M0-M255范围,已经足够。
二个字节共16位,可译M0-M32767
|---‖---DECB0001
F7.0F10
0003
R300
从M03开始一直可译到M10,(M03M04M05M06M07M08M09M10)共8位,加工程序中,遇到某个M指令,相应R300的某个位会接通为1,控制外部电路,完成相应功能。
SB7中有新指令,可执行多字节译码,不再拘限于一个字节。
指令格式中,NNX
NN多个字节译码的字节数
00-01单字节译码译8位
02-99多字节译码字节数
X译码数据长度
|----‖----DECB994------|
F10
3
R0
991译F10
992译F10,F11
994译F10-F13
本例可译M3-M795(3+99×8=795)
起始数:
M3-M795
输出继电器:
R0.0-R98.7
M3-M795M代码即为加工程序中的M指令。
第四天上午:
五.比较指令
比较指令用于比较:
输入值和比较值的大小,主要用于数控机床编程的T代码和实际刀号的比较,同样分BCD指令和二进制比较指令。
1.COMP(BCD比较)
COMP指令的输入值和比较值为2位或4位BCD代码,
指令格式有如下项:
指定数据大小:
BYT=0处理数据(输入值和比较值)为BCD码
BYT=1处理数据为4位BCD码
控制条件:
ACT=0不执行比较指令
ACT=1执行比较指令
输入数据格式:
0:
用常数指定输入基准数据
1:
用地址指定输入基准数据。
基准数据(输入值):
输入的数据(常数或常数存放地址)
比较数据地址:
(比较值)指定存放比较数据的地址
比较结果输出:
输入值﹥比较值,W1=0
(前面)(后面)
输入值≤比较值,W1=1
在这讲解一下常数和地址的概念
常数代表一个具体数值,如1,2,3,4等等
地址是一个寄存器,里边有存储内容。
地址如果存放一个常数,称为直接寻址,(A)
地址中如果存放一个地址,称为间接寻址((A))
2.COMPB(二进制数之间比较)
COMPB指令功能是比较1个,2个或4个字节长的二进制数据之间比较大小,比较结果存放在运算结果寄存器(R9000)中
控制条件:
ACT=0,不执行比较指令。
ACT=1,执行比较指令
输入数据格式□00□
↓→格式指定↓→指定数据长度
0常数1一个字节
1地址2二个字节
4四个字节
基准数据(输入数据):
输入的数据(常数或常数存放地址)
比较数据地址(比较值):
指定存放比较数据的地址
比较寄存器R9000:
基准数据(输入值)=比较数据
R9000.0=1
基准数据(输入值)﹤比较数
 升级会员
升级会员 