典型光学系统中像差研究的一些问题.docx
《典型光学系统中像差研究的一些问题.docx》由会员分享,可在线阅读,更多相关《典型光学系统中像差研究的一些问题.docx(17页珍藏版)》请在冰豆网上搜索。
典型光学系统中像差研究的一些问题
典型光学系统中相差研究的一些问题
摘要本文先简单介绍像差理论,包括几种像差及其成因。
然后介绍了在典型光学成像系统中的像差研究的一些问题,有基于人眼模型的不同瞳孔直径下眼像差特性、变焦显微系统的像差分析、全息校正望远镜主镜像差原理。
最后得出总结。
关键词像差理论人眼像差特性变焦显微镜像差望远镜主镜像差
1引言
像差研究是应用光学中一个很重要的局部。
在实际光学系统设计中,如何减少像差对物像质量的影响,得到实际要求范围内的物像是一个很关键的问题。
所以在应用光学的学习中对于像差的学习以及了解现在像差研究的一些问题是十分必要的。
借此次大作业的时机,我对这方面的问题进行了简单的了解和研究。
本文先根据课上内容对像差理论进行简单的介绍和小结,然后介绍了在人眼、望远系统和显微系统中像差研究的一些问题。
2像差理论简介
在光学系统中实际所成的象与理想象总是有差异,这种成象的差异就称为光学系统的像差。
像差分为以下几类:
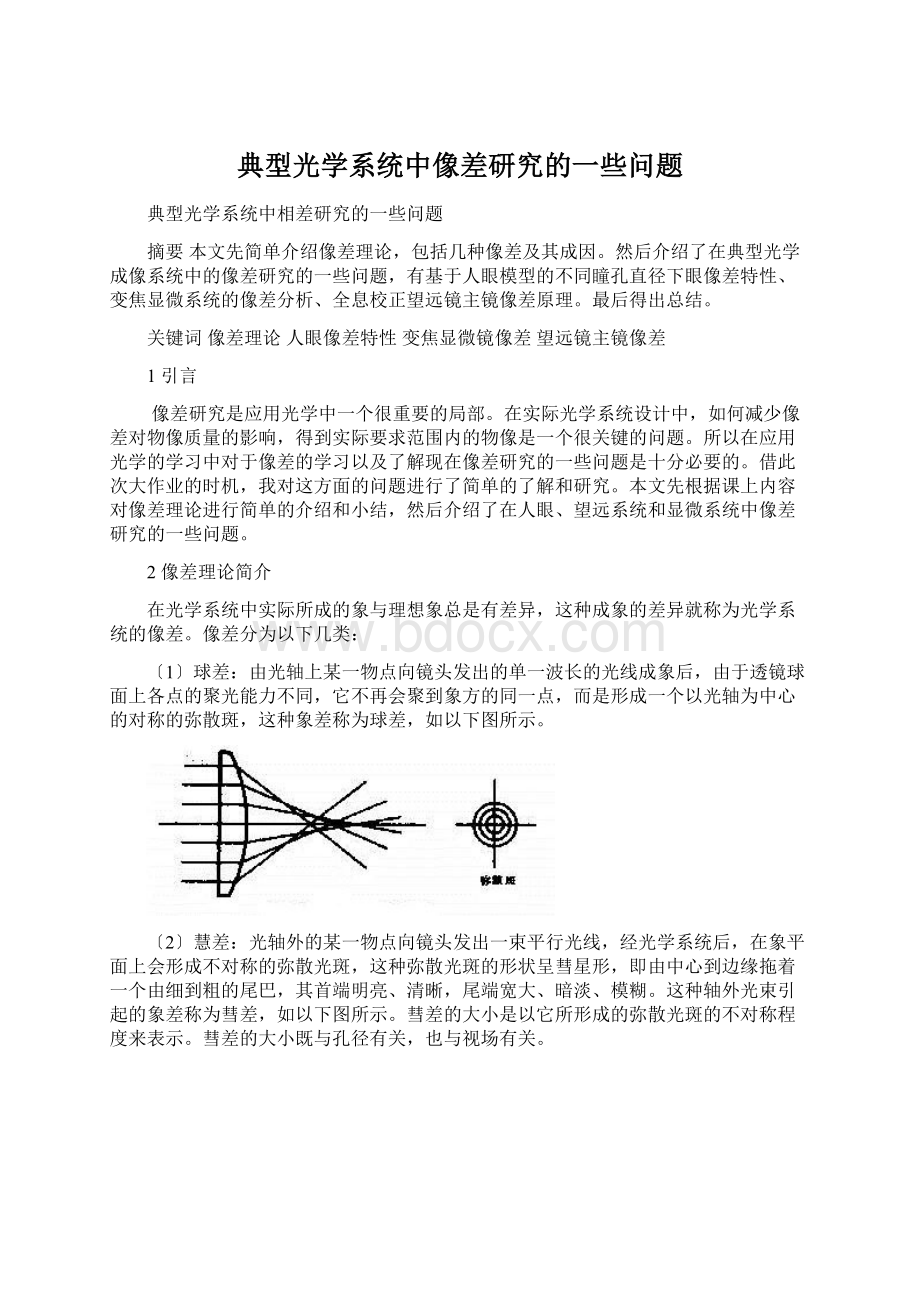
〔1〕球差:
由光轴上某一物点向镜头发出的单一波长的光线成象后,由于透镜球面上各点的聚光能力不同,它不再会聚到象方的同一点,而是形成一个以光轴为中心的对称的弥散斑,这种象差称为球差,如以下图所示。
〔2〕慧差:
光轴外的某一物点向镜头发出一束平行光线,经光学系统后,在象平面上会形成不对称的弥散光斑,这种弥散光斑的形状呈彗星形,即由中心到边缘拖着一个由细到粗的尾巴,其首端明亮、清晰,尾端宽大、暗淡、模糊。
这种轴外光束引起的象差称为彗差,如以下图所示。
彗差的大小是以它所形成的弥散光斑的不对称程度来表示。
彗差的大小既与孔径有关,也与视场有关。
〔3〕像散:
像散也是一种轴外象基,与彗差不同,它是描述无限细光束成象缺陷的一种象差,仅与视场有关。
由于轴外光束的不对称性,使得轴外点的子午细光束的会聚点与弧矢细光束的会聚点各处于不同的位置,与这种现象相应的象差,称为像散。
子午细光束的会聚点与矢细光束的会聚点之间距离在光轴上的投影大小,就是象散的数值。
如以下图所示。
〔4〕场曲:
当垂直于光轴的物平面经光学系统后不成象在同一象平面内,而在一以光轴为对称的弯曲外表上,这种成象缺陷称为场曲。
场曲也是与孔径无关的一种象差。
由于象散的存在,子午细光束所形成的弯曲象面与弧矢细光束所形成的弯曲象面往往不重合,它们分别称为子午场曲Xt'和弧矢场曲Xs',如以下图所示。
(5)畸变:
畸变是指物体所成的象在形状上的变形。
畸变并不影响象的清晰度,只影响物象的相似性。
由于畸变的存在,物空间的一条直线在象方就变成一条曲线,造成象的失真,如以下图所示。
畸变分桶形畸变和枕形畸变两种。
畸变与相对孔径无关,仅与镜头的视场有关。
〔6〕色差:
在照相系统中,镜头总是用白光成象。
而白光是由各种不同波长的单色光组成的,而不同波长的单色光在同一光学介质中具有不同的折射率,因此在同一焦面上其会聚点会不同,这种现象称为色差。
3基于人眼模型的不同瞳孔直径下眼像差特性
3.1离焦
图3.1a给出了两种眼模型在不同瞳孔直径下的离焦量值的变化曲线图,图中实线表示的是L眼模型在不同瞳孔直径下的离焦量变化情况,虚线表示的是G眼模型在不同瞳孔下的离焦量变化情况。
图中横坐标表示的是瞳孔直径的变化,纵坐标表示的是波前像差Zernike的第四项系数Z4,在波前像差Zernike前35项系数中Z4表示的是光学系统的离焦量。
在图3.2.1a中比照两条曲线可以看出,随着瞳孔直径的变化,L眼模型离焦量的变化曲线要比G眼模型的变化曲线平缓很多,当瞳孔直径从2mm变化到8mm时,L眼模型的离焦量从-0.003增长到1.934,而G眼模型的离焦量从-0.334增长到9.217。
对G眼模型来说,当瞳孔直径为2mm时,G眼模型的离焦量值为负值,且接近于零,当瞳孔直径在2mm-5mm之间时,G眼模型的离焦量值变化不是很大,当瞳孔直径大于5mm时,G眼模型的离焦量值呈现大幅度的上升变化。
在图3.2.1a中的L眼模型,随着瞳孔直径的变化,其离焦量变化曲线很平缓,变化不是很明显,为了更容易看出L眼模型随着瞳孔直径变化呈现出的变化趋势,在图3.2.1b中将L眼模型离焦量的变化曲线图给予了放大。
在图3.2.1b可以清楚地看到,当瞳孔直径为2mm时,L眼模型的离焦量值也是很小,随着瞳孔直径上升至5mm时,其离焦量值也仅为0.26,当瞳孔直径接着再变大时,L眼模型的离焦量值呈现了相比之前较大幅度的上升。
比照这两条曲线可以看出,随着瞳孔直径的变化,虽然两条曲线的变化幅度相差很大,但是这两种眼模型的离焦量变化趋势是大致相同的,均在瞳孔直径为2mm-5mm之间变化时,两种眼模型的离焦量均变化不大,当瞳孔直径从6mm继续增大时,两种眼模型的离焦量均呈现大幅度上升的趋势。
图3.1a两种眼模型在不同瞳孔直径下的离焦量变化曲线图
图3.1bL眼模型在不同瞳孔直径下的离焦量变化曲线图
3.2球差
图3.2给出了两种眼模型在不同瞳孔直径下的球差值的变化曲线图,图中实线表示的是L眼模型在不同瞳孔直径下球差的变化情况,虚线表示的是G眼模型在不同瞳孔下球差的变化情况。
图3.2两种眼模型在不同瞳孔直径下的球差曲线图图
从图中可以看出,随着瞳孔直径的逐渐增加,除了L眼模型的球差变化幅度稍微小于G眼模型的球差变化幅度之外,两种眼模型的球差变化情况几乎是相同的,均随着瞳孔直径的变化而增大,且增加幅度也越来越大,具体表现为在瞳孔直径为2mm-5mm时,两种眼模型的球差变化量均不是很大,当瞳孔直径大于6mm时,球差增长幅度较大。
在瞳孔直径为2mm时,即人眼在亮度较强环境下,两种眼模型的球差值均很小,接近于0mm;当处于正常环境下,两种眼模型的球差值均在0.02mm之下;当瞳孔直径为8mm时,人眼处于亮度较暗的环境之下的情况下时,两种眼模型的球差值略有不同,G眼模型的球差值较大为0.185mm,L眼模型的球差值稍小些,为0.141mm。
3.3人眼波前像差的PV值
图3.3a给出了两种眼模型在不同瞳孔直径下波前像差的PV值的变化曲线图,其中实线是L眼模型波前像差的PV值在不同瞳孔直径下的变化曲线图,虚线表示的是G眼模型波前像差的PV值在不同瞳孔直径下的曲线图。
图3.3a两种眼模型在不同瞳孔直径下的PV值曲线图
比照这两条PV值曲线图,我们可以看出,在不同瞳孔直径下,G眼模型波前像差的PV值均大于L眼模型波前像差的PV值,并且随着瞳孔直径的增大,两种眼模型的PV值相差越大,例如,当瞳孔直径为2mm时,G眼模型的PV值为1.16waves,而L眼模型的PV值为0.01waves;当瞳孔直径为4mm时,G眼模型的PV值为2.57waves,而L眼模型的PV值为0.33waves;当瞳孔直径为8mm时,G眼模型的PV值为36.64waves,而L眼模型的PV值为6.68waves。
图3.3b单独给出了L眼模型的波前像差PV值在不同瞳孔直径下的曲线图。
结合图3.2.3a中的G眼模型的PV值曲线图可以看出,在瞳孔直径为2mm-8mm时,两种眼模型的波前像差PV值变化都是比较缓慢的,在瞳孔直径大于6mm时,两种眼模型的波前像差的PV值变化幅度均明显增大。
概括来说,随着瞳孔直径的增大,两种眼模型的波前像差PV值均变大,并且变化幅度在瞳孔直径为6mm之后越来越大。
图3.3bL眼模型在不同瞳孔直径下的PV值曲线图
3.4人眼波前像差的RMS值
而L眼模型的rms值为1.981waves。
图3.2.4a给出了两种眼模型在不同瞳孔直径下波前像差的rms值的变化曲线图,图中实线表示的是L眼模型波前像差的rms值在不同瞳孔直径下的变化曲线图,虚线表示的是G眼模型波前像差的rms值在不同瞳孔直径下的曲线图。
从图中可以看出,在不同瞳孔直径下,G眼模型波前像差的rms值比L眼模型波前像差的rms值要大的多,例如,在瞳孔直径为2mm时,G眼模型的rms值是0.332waves,而L眼模型的rms值是0.003waves;当瞳孔直径为4mm时,G眼模型的rms值为0.772waves,而L眼模型的rms值为0.096waves;当瞳孔直径为8mm时,G眼模型的rms值为10.179waves,而L眼模型的rms值为1.981waves。
图3.4aG眼模型在不同瞳孔直径下的rms值曲线图
图3.4b单独给出了L眼模型在不同瞳孔直径下的波前像差rms曲线图,比照图3.4a中的G眼模型波前像差rms曲线图可以看出,G眼模型和L眼模型的rms值随着瞳孔直径的逐渐增大变化情况大致相同,当瞳孔直径从2mm逐渐增大到5mm时,rms曲线较为平稳,变化不大,当瞳孔直径从6mm增大到8mm时,rms值增长幅度较大。
图3.4bL眼模型在不同瞳孔直径下的rms值曲线图
4变焦显微系统的像差分析
随着变焦距光学系统的成像质量逐渐接近并到达定焦距光学系统的水平,变焦距光学系统的应用领域不断扩大。
它的应用不再局限于最初的生物显微镜,而是已经延伸到了各个行业,包括电子工业、半导体工业、IT产业、以及植物学、生物学、病理学、细菌学等;具体应用如电子产业的IC电路检验,液晶屏检验;运输,金属行业的涂饰外表,金属外表检验;材料,化学行业的玻璃纤维检验以及其他一些行业如食品,药物的检验,植物,生物观察等等。
本节将重点介绍变焦显微系统的像差分析。
4.1研究内容简介
像差分析基于ZEMAX光学分析软件,利用ZEMAX的MTF曲线、SPT点列图、RAY曲线、OPD曲线、场曲、畸变曲线等,完成变焦显微镜系统像差的全面分析。
显微物镜中有消色差物镜,半复消色差物镜和复消色差物镜。
消色差物镜是指对两条谱线校正轴向色差的物镜;半复消色差物镜的二级光谱比消色差物镜小;复消色差物镜是指对三条谱线校正轴向色差的物镜。
无论是哪一种物镜,七种像差反映在ZEMAX中表现为同一分辨率下MTF值的大小,RayFan曲线的形状,点列图的尺寸以及场曲和畸变的大小。
4.2MTF曲线
MTF表示各种不同频率的正弦强度分布函数经光学系统成像后,其比照度〔振幅〕的衰减程度。
当某一频率的比照度下降到零时,说明该频率的光强已无亮度变化,即频率被截止。
横坐标为频率,纵坐标为归一化后的比照度〔或者叫反差〕,反差就是像面最亮和最暗处的差异程度。
MTF曲线和坐标轴所围的面积越大,说明光学系统所传递的信息量越多,光学系统的成像质量越好,图像越清晰。
MTF曲线中除了不包含光学系统的
场曲畸变信息以外,MTF值越大,光学镜头再现复原的能力就越强。
在MTF图中,MTF值是一个界于0到1之间的数值。
1.0表示百分之百完全分辨,0.6表示只有六成的分辨能力,此时白色线条略带灰色,黑色线条也不是深黑色。
0.0表示完全无法分辨,所呈现出来的只是一片灰色。
水平坐标表示镜头所能分辨的线对数。
因此,MTF值是用来评估不同线频时黑白线条的反差。
例如,当人们在读白纸黑字时,要求的最低反差是20%,低于20%读起来就比较吃力。
横坐标在高频时表示镜头分辨细节的能力,低频时表示镜头再现整体轮廓的能力。
望远物镜,显微物镜均为小像差系统,传递函数值高,设计时应尽可能接近衍射极限;投影物镜,照相物镜为大像差系统,传递函数值较小且离衍射极限很远,计算传递函数值时应设置最高截止频率。
通常用特征频率的传递函数值来评价光学系统的像质。
以5或10线对来评价镜头的比照度性能时,此频率的MTF值纵然只有2~3%的差异,人眼也可轻易分辨,所以这是一个重要的根本频率。
好的镜头在频率为5lp/mm,小光圈时子午及弧矢方向MTF值可以到达95%。
低于90%表示像质较差。
以40线对来评价镜头的清晰度性能。
40lp/mm代表一个镜头可以分辨多细的物体(譬如一根毛发)。
此频率下MTF纵然有10%差异,人眼也不太能分辨其差异。
有了上面的分析以后,得到变焦显微镜的不同焦距位置的MTF曲线。
如图4-1中(a)、(b)、(c)、(d)分别代表了从长焦到短焦的四个焦距位置的MTF曲线。
图4-1变焦显微镜不同焦距位置MTF曲线图
从以上的MTF曲线中可以得到:
1.镜头在频率为5lp/mm时,系统向短焦位置变化的过程中,MTF值从均在95%以上。
2.频率为40lp/mm,在长焦时对应的MTF值在20%以上,短焦时MTF值在60%以上,说明系统的综合像质良好。
3.光学系统的截止频率值在四个焦距位置分别为208lp/mm,299lp/mm,369lp/mm,390lp/mm。
4.随着活动组份的移动,系统向短焦方向变化,放大倍率逐渐增大,不同视场下MTF值逐渐向衍射极限值靠近。
5.往短焦变化过程中,MTF曲线在衍射极限值时对应的MTF值从0.1~0.2逐渐增大到0.2~0.3之间。
6.随着焦距减小,不同视场下的MTF曲线以及同一视场下的子午和弧矢方向的MTF曲线趋向一致,说明往高倍变化的过程中,随着视场变小,变焦显微镜物方视场逐渐变得均匀,成像质量趋于良好。
7.由MTF曲线可以发现,通常子午方向较弧矢方向MTF值来得差,在镜头优化时,可以用较高的弧矢方向MTF值来补偿子午方向做某种程度的像差补偿。
4.2RayFan曲线
图4-2变焦显微镜不同焦距位置RAYFAN曲线图
RayFan曲线能够表示光学系统的综合像差。
横坐标表示光学系统的入瞳位置,归一化为-1到+1之间,0位置对应的就是光轴穿过入瞳中心与像面的交点。
纵坐标那么是其他光线与主光线在像面上的相对位置变化。
由于在计算光路时通常考虑子午面和弧矢面上的光线,因此同一个视场下的同一个波长编号对应两条RayFan曲线。
实际上,RayFan曲线是考虑了点列图子午和弧矢方向上的像点分布情况,是点列图的一个特例。
理想光学系统的RayFan曲线是在横轴上,然而由于像差的存在,会出现一定形状的曲线。
比方,S形状的曲线表示这个系统有球差,多个S形状的曲线表示光学系统有高级球差。
图4-2是不同焦距位置RAYFAN曲线图。
从图中可以看出,零视场较其他视场曲线平坦,低倍较高倍曲线平坦。
由于球差为轴向像差,前固定组使用对称型物镜,从RayFan曲线形状可以看出,高倍时系统球差相比照来说较为严重。
4.3SpotDiagram点列图
图4-3变焦显微镜不同焦距位置点列图
下表是四个焦距位置,图3-3光学系统在不同视场下,点列图半径值。
表格3-5不同焦距位置点列图半径/μm
由一点发出的许多光线经光学系统后,因像差使其与像面的交点不再集中
于同一点,而形成了一个散布在一定范围的弥散图形,称为点列图。
同一视场下不同色斑的分开程度说明色差的影响程度,因而,点列图半径是光学系统的像质综合评价指标。
中心视场较边缘视场的像斑半径小,短焦距位置较长焦距位置的像斑半径小。
随着系统往短焦距的方向变化,不同视场下的像斑半径都逐渐变小,物面的分辨率逐渐接近系统的衍射极限,分辨能力逐渐提高。
4.4场曲和畸变
图3-7变焦显微镜不同焦距位置场曲畸变曲线图
实际像面偏离高斯像面的距离称为像面弯曲,简称场曲。
子午像面相对于高斯像面的偏离量称为子午场曲,弧矢像面相对于高斯像面的偏离量称为弧矢场曲。
低倍时的子午场曲和弧矢场曲都较为严重,且子午和弧矢像面的偏离量较大。
高倍时像面的场曲减小,子午弧矢像面趋于重合。
理想光学系统中,一对共轭的物像平面上的物像垂轴放大率是常数,也就是说,物像平面上的各局部的垂轴放大率相等。
实际光学系统中,视场较小时,近似接近理想情况,当视场较大时,像平面上不同局部的垂轴放大率随着视场大小而变,即物像之间失去相似性,称这种像变形的成像缺陷为畸变。
目视光学仪器中,畸变可允许到4%。
如假设需要用来测量的光学系统那么对畸变的要求很高。
本论文的摄影变焦显微镜,主要是用于观察成像,因而可以放宽畸变的要求。
摄影变焦显微光学系统中畸变小于±2%,根本上符合要求。
5全息校正望远镜主镜像差原理
利用全息技术校正望远镜光学误差和系统像差的方法是由俄罗斯科学家Denisyuk和Soskin于1971年提出的,其实质是利用激光全息技术获得大像差波面的位相共轭波面,从而补偿、校正原始大像差波面,实现无像差光学成像。
以下分别对折射式望远镜主镜和反射式望远镜主镜的像差校正原理进行分析研究。
5.1折射式望远镜
全息技术用于校正折射式望远镜主镜像差原理如图5-1所示。
图5-1折射式望远镜主镜像差的全息校正原理
图中用一个理想的光学元件和一块像差板,表示折射望远镜中不完善的物镜,如图5-1〔a〕所示。
无穷远处一束衍射受限的平行光入射至这一有像差的物镜上,其会聚光束经望远镜目镜准直照射到全息干板H上。
另一束衍射受限的参考光束以一定的角度入射至全息记录干板H上,假设这两光束满足干预要求,那么两光束产生干预,由此在全息记录干板H上得到有像差的光束与衍射受限参考光束相干预的全息图,如果适当调节望远镜的物镜和目镜的焦距大小,那么可用来调整对无穷远处物体所成像的大小。
如果用原照明光波去再现此全息图,如图5-1〔b〕所示,那么可再现出原衍射受限的无像差的参考光束。
如果用远处的物光波替代原照明光波去再现此全息图时,如图5-1〔c〕所示,从而再现出衍射受限参考光束。
由于在再现光束中保存着原始的物光波信息,因而可形成远距离物体的无像差像。
5.2反射式望远镜
反射望远镜在天文观测中的应用已十分广泛,由于反射望远镜光学性能的重要特点是没有色差,也不存在二级光谱,且对于反射镜的材料,只要求它的膨胀系数较小、应力较小和便于磨制。
因此,它与折射系统相比,可以使用大口径材料,也可以使用多镜面拼镶技术等。
由于反射镜的造价要比透镜低的多,目前设计和建造的大口径望远镜都是采用的反射系统。
因此对反射式望远镜主镜像差校正的研究尤为重要。
全息技术用于校正反射式望远镜主镜像差原理如图5-2所示。
一束相干平行
光入射至具有大像差的球面反射镜M,其反射光经平面反射镜后由透镜L准直为平行光束垂直照射到全息干板H上,全息干板位于M经次级光学元件L所成像的像面上,参考光束为衍射受限的单色平行光束,与全息记录干板H法线方
向的夹角为θ。
设透镜L的焦距为f,假设M至L的距离p,L至全息记录干板H的距离q,它们满足如下关系:
。
这样全息干板H所记录的是一幅球面反射镜M的像面全息图。
由此得到像差光束与衍射受限参考光束相干预
的全息图,如5-2〔a〕所示。
该全息图的再现如图2.6(b)所示,来自远距离物体的光由具像差的望远镜主镜M收集,经次级光学元件L后照射至全息记录干版上,从而再现出衍射受限的参考光束。
由于在再现光束中保存着原始的光强调制,因而可形成远距离物体的无像差像。
图5-2反射式望远镜主镜像差校正原理
设照射到全息干板H上的物光束和平行参考光束的复振幅光场分布分别为:
(2.20)
(2.21)
其中
、
分别为物光波和参考光波的振幅;
为由球面反射镜M的面形误差引起的位相漂移;k=2π/λ,λ为记录光波长,
为参考光束与全息干板H法线方向的夹角。
那么入射至全息记录干板H上总的复振幅光场分布为:
(2.22)
因此,全息干板H的光强度分布为:
(2.23)
在线性记录和处理的条件下,全息图的振幅透过率与曝光光强成正比。
假设略去比例常数,可将全息图的振幅透过率写为:
(2.24)
经显影和定影处理后将全息图严格复位至原记录位置,用远距离物光束照明再现全息图。
设远距离物光束的光场分布为:
(2.25)
那么透过全息图H后的复振幅光场分布为:
(2.26)
其中第三项衍射光波再现了原参考光波的光场,不再含有由球面反射主镜M的面形误差引起的位相因子。
假设原参考光束为衍射受限的平行光束,那么该包含了全息校正板和大面形误差及系统像差的望远系统具有衍射受限成像性能,可用于对远距离物体的无像差成像。
6总结
本文介绍了三个典型光学系统中,即人眼、显微系统、望远系统中相差研究的三个问题,分别是基于人眼模型的不同瞳孔直径下眼像差特性、变焦显微系统的像差分析、全息校正望远镜主镜像差原理。
在此次的大作业时机中,我对像差在实际光学系统设计中的问题有了一个了解,同时对像差有了一个新的认识。
希望老师对我的论文多多进行指导。
7参考文献
[1]张以谟,应用光学,电子工业出版社,2021年
[2]王峰林,基于眼模型的人眼像差特性研究,吉林大学,2021年
[3]林明发,变焦显微镜设计,合肥工业大学,2021年
[4]朱爱敏,全息校正望远镜主镜像差的机理及实验研究,苏州大学,2021年
 升级会员
升级会员 