气动培训讲义.docx
《气动培训讲义.docx》由会员分享,可在线阅读,更多相关《气动培训讲义.docx(15页珍藏版)》请在冰豆网上搜索。
气动培训讲义
项目一直接控制和间接控制
一、直接控制
定义:
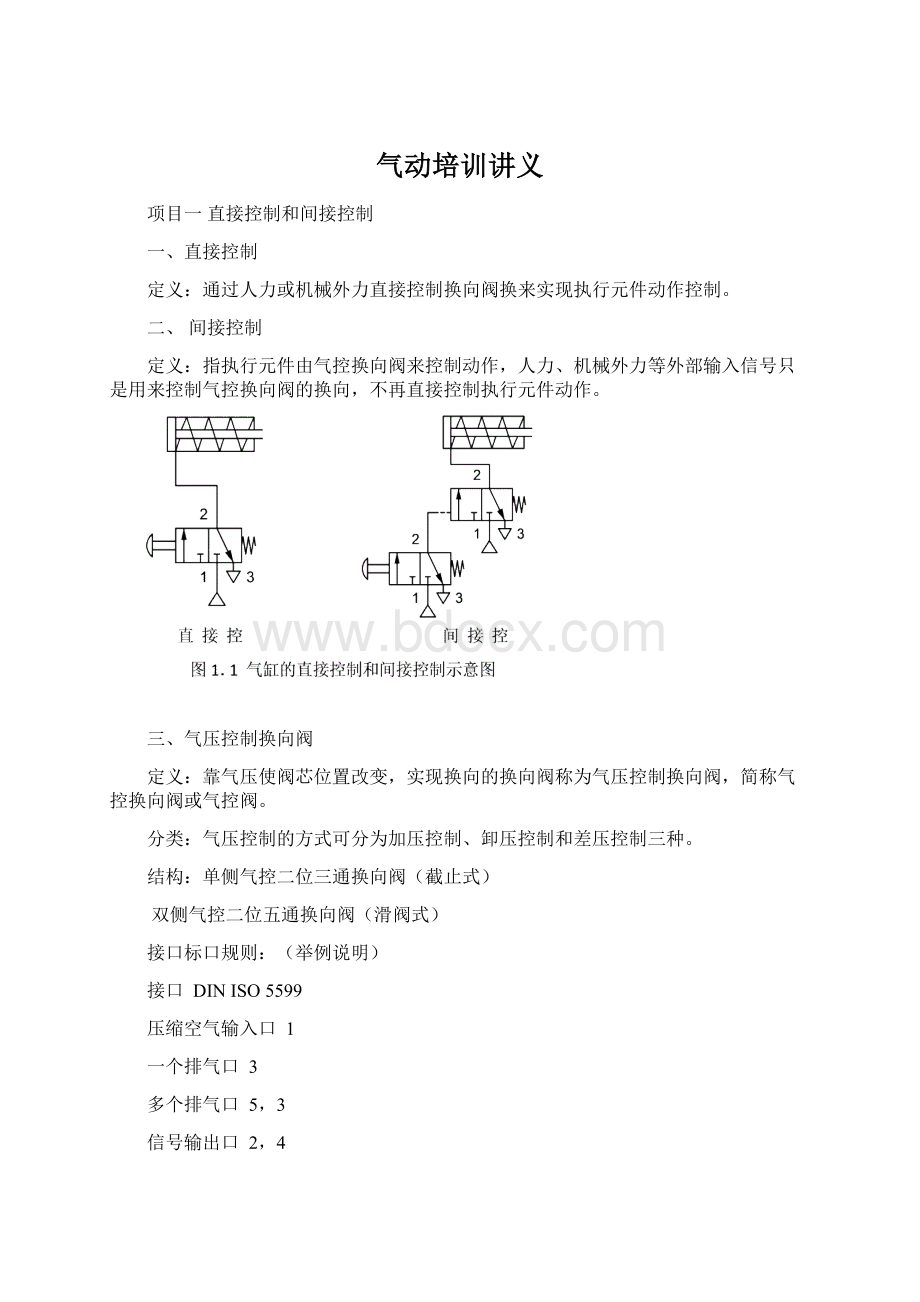
通过人力或机械外力直接控制换向阀换来实现执行元件动作控制。
二、间接控制
定义:
指执行元件由气控换向阀来控制动作,人力、机械外力等外部输入信号只是用来控制气控换向阀的换向,不再直接控制执行元件动作。
三、气压控制换向阀
定义:
靠气压使阀芯位置改变,实现换向的换向阀称为气压控制换向阀,简称气控换向阀或气控阀。
分类:
气压控制的方式可分为加压控制、卸压控制和差压控制三种。
结构:
单侧气控二位三通换向阀(截止式)
双侧气控二位五通换向阀(滑阀式)
接口标口规则:
(举例说明)
接口DINISO5599
压缩空气输入口1
一个排气口3
多个排气口5,3
信号输出口2,4
使接口1和2导通的控制管路接口12
使接口1和4导通的控制管路接口14
使阀门关闭的控制管路接口10
课题说明:
利用一个气缸将某一方向传送装置送来的木材推送到与其垂直的传送装置上做进一步加工。
利用一个按钮使气缸活塞杆伸出,将木块推出;松开按钮,气缸活塞杆缩回。
1.回路分析
2.回路图设计
3.回路连接
项目二逻辑控制
一、逻辑“与”的实现(图2.8)
1、实现方法
逻辑“与”的功能在气动回路中可以用输入控制元件的串联连接或用双压阀来实现。
2、双压阀
作用:
实现逻辑“与”功能、选择低压
二、逻辑“或”的实现
1.实现方法
逻辑“或”的功能在气动回路中可以通过将控制信号按下图进行串联或用梭阀来实现。
错误的逻辑“或”回路:
图2.11
2.梭阀
作用:
实现逻辑“或”功能、选择高压
实验课题:
木材剪切装置控制
课题说明:
利用一个气缸对塑料板材进行成形加工,气缸活塞杆在两个按钮1S1、1S2同时按下后伸出,带动曲柄连杆机构对塑料板材进行压制成形。
加工完毕后,通过另一个按钮1S3让气缸活塞杆回缩。
1.回路分析(双手操作的作用)
2.回路图设计
3.回路连接
实验课题:
门开关控制装置
利用一个气缸对门进行开关控制。
气缸活塞杆伸出,门打开;活塞杆缩回,门关闭。
门内侧的开门按钮和关门按钮分别为1S1和1S2,门外侧的开门按钮和关门按钮分别为1S3和1S4。
1S1、1S3任一按钮按下,都能控制门打开;1S2、1S4任一按钮按下,都能控制门关闭。
课题说明:
1.回路分析
2.回路图设计
3.回路连接
项目三行程控制回路
1、行程程序控制回路的定义
程序控制的定义:
当一个自动化装置中的各个执行元件按预先设定的顺序,根据生产过程中的位移、时间、压力等信号的变化协调动作时,这种自动控制方式就称为程序控制。
程序控制分类:
时间程序控制、行程程序控制、混合程序控制
2、行程程序控制回路的实现
采用行程程序控制的气动回路中应有对前一个执行元件动作到位情况进行检测的检测元件,也就是位置传感器。
有些时候在安装位置检测元件比较困难或根本无法进行位置检测时,行程信号也可用其他类型的信号来代替,如时间、压力信号等。
3、行程阀
定义:
行程阀即机械控制换向阀,它是用凸轮、撞块或其它机械外力来推动阀芯动作、实现换向的换向阀,主要用来控制机械运动部件的行程。
分类:
行程阀常见的操控方式有顶杆式、滚轮式、单向滚轮式等
结构:
与手动换向阀相似,不再详细介绍
单向滚轮式行程阀的特点:
图3.1
实验课题:
自动送料装置
课题说明:
利用一个双作用气缸将料仓中的成品推入滑槽进行装箱。
为提高效率,采用一个带定位的开关启动气缸动作。
按下开关,气缸活塞杆伸出。
活塞杆伸到头即将工件推入滑槽,。
工件推入滑槽后活塞杆自动缩回,活塞杆完全缩回后再次自动伸出,推下一个工件,如此循环,直至再次按下定位开关,气缸活塞杆完全缩回后停止。
1.气动控制回路分析
这个课题可以认为是一个只有一个执行元件,两个动作的简单行程程序控制回路。
为实现这两个动作:
气缸伸出和气缸缩回的顺序控制,我们需要两个位置检测元件。
这两个检测元件一个用于检测气缸活塞是否伸出到位,另一个用于检测气缸活塞是否缩回到位。
通过这两个检测元件就可以对气缸的顺序动作进行控制。
定位开关信号和用于检测气缸活塞是否回缩到位的检测元件信号串联或用双压阀连接,来控制气缸的伸出,并实现气缸活塞的连续循环动作。
另一个用于检测活塞是否伸出到位的检测元件的输出信号则用来控制气缸活塞的返回。
2、设计气动控制回路
图3.2自动送料装置气动控制回路图
3、回路连接
在实际气压传动系统中由于回路一般都比较复杂、响应速度要求也较高或者系统中除了有气动执行元件外还有其他如电动机、液压缸等其他类型的执行元件,所以执行元件的运动控制大多采用电气控制方式。
这样不仅能对不同类型的执行元件进行集中统一控制,也可以较方便的实现比较复杂的控制要求和远程控制。
另外电信号的传递速度也要远远高于气压信号的传递速度,控制系统可以获得更高的响应速度。
1.电磁换向阀(P.45)
定义:
利用电磁线圈通电时,静铁芯对动铁芯产生的电磁吸力,使阀芯改变位置实现换向的,简称为电磁阀。
强调:
由于它能够将得到的电信号转换为气信号输出,使得气压传动系统的电气控制成为可能,因此成为气压传动控制系统中最主要的元件。
分类:
电磁换向阀按操作方式可分为直动式和先导式。
表示方法:
2.接近开关
定义:
一种具有感知物体接近能力的器件,它利用其对所接近的物体具有的敏感特性,达到识别物体的接近并输出开关信号的目的,因此通常又把接近传感器称为接近开关。
分类:
在气动系统中常用的位置检测接近开关有:
电感传感器、电容传感器、光电传感器和磁性开关。
图形符号:
实验课题:
自动送料装置
1、电气控制回路分析
采用电气控制和采用气压控制的设计思想是一致的。
定位开关和安装在气缸尾端的位置检测元件串联,用来控制气缸的伸出和实现气缸的连续往复运动;安装在气缸首端的位置检测元件则用来控制气缸的缩回。
2.设计控制要求2电气控制回路
3.回路连接
实验课题:
纸箱抬升推出装置
(一)
课题说明:
利用两个气缸把已经装箱打包完成的纸箱从自动生产线上取下。
通过一个按钮控制1A1气缸活塞伸出,将纸箱抬升到2A1气缸的前方;到位后,2A1气缸活塞杆伸出,将纸箱推入滑槽;完成后,1A1气缸活塞杆首先缩回;缩回到位后,2A1气缸活塞杆缩回,一个工作过程完成。
为防止造成纸箱破损应对气缸活塞运动速度进行调节。
位移步骤图的绘制
位移步骤图的作用:
利用位移步骤图能清晰的说明行程程序各步的动作状态,也能方便我们进行回路设计和回路分析。
画法:
以图4.1为例,可以看到位移步骤图在绘制时主要注意以下几点:
(1)图表左侧的1A1和2A1分别为执行元件的标号。
(2)图表纵坐标上的0和1分别表示气缸处于完全缩回和完全伸出状态。
(3)图表横轴的分段数由该回路一个动作循环所含的步骤数决定。
(4)图表横轴的分段采用均匀分段,即每一段只表示一个动作步骤,并不表示执行该步骤所用的时间。
(5)粗实线表示左侧标号所对应的执行元件的动作情况。
例如1A1所对应的粗实线在第一段内出现从0到1的斜线,这表明在本行程程序控制回路中第一步为1A1气缸活塞的伸出。
1.回路分析
本课题的回路是有两个执行元件,四个动作步骤的行程程序控制回路,动作顺序为:
1A1伸出—2A1伸出—1A1缩回—2A1缩回。
因此在回路中应设置4个位置检测元件,分别检测1A1、2A1气缸活塞是否伸出到位、缩回到位。
这4个位置检测元件发出的信号作为当前动作完成的标志用来启动下一步动作。
比如,当用于检测1A1气缸活塞是否伸出到位的检测元件发出信号时,说明1A1气缸活塞已经伸出到位,即顺序动作中的第一步已经完成,应开始第二步,让2A1气缸活塞伸出,所以该信号应用来控制换向阀2V1换向,使2A1气缸活塞伸出。
本课题要求采用气动控制方式和电气控制方式二种方式来实现。
2.设计、绘制气动控制回路图
注:
1A1气缸前方的两个行程阀之所以标为2S1和2S2,是因为它们被用来控制2A1气缸活塞的动作。
2A1气缸前方的两个行程阀标为1S2和1S3也是因为它们是用来控制1A1气缸活塞动作的。
3.气动控制回路连接
4.设计、绘制电气控制回路图
注:
接近开关的标号与气动行程阀不同,它不受其控制作用的影响,由其安装位置决定,所以1A1气缸前方的接近开关标为1B1和1B2,2A1气缸缸体上的磁性开关标为2B1和2B2。
5.回路连接
项目四故障信号分析
实验课题:
纸箱抬升推出装置
(二)
课题说明:
四个动作步骤的行程程序控制回路,动作顺序为:
1A1伸出—2A1伸出—2A1缩回—1A1缩回。
1.绘制位移步骤图
2.回路连接
3.查找障碍信号
利用磁性贴片在黑板上绘制回路图,并根据动作步骤分析障碍信号,可以得到障碍信号1S3和2S1。
一、行程程序控制回路的信号障碍问题
障碍信号定义:
大部分行程程序控制回路的控制信号之间,都存在着各种形式的干扰,这些信号称为障碍信号,会使回路无法正常工作。
在气动行程程序控制回路中障碍信号主要有I型障碍信号和II型障碍信号两种。
●I型障碍信号一个行程程序控制回路在一个工作过程中每个气缸只作一次往复运动称为单往复行程程序控制回路,在单往复程序中,若在某个主控阀的两个控制口上同时存在两个相互矛盾的控制信号,则称为该障碍信号为I型障碍信号。
●II型障碍信号在一个工作过程中至少有一个气缸往复运动两次或两次以上,称为多往复行程程序控制回路。
在这种回路中,如果存在一个控制信号多次出现来控制不同动作,或分别控制同一个气缸的两个相反动作,这个信号就是II型障碍信号。
我们在这里只讨论I型障碍信号的分析判断和排除。
1.障碍信号的分析
行程程序控制回路设计的关键就是要找出这种障碍信号并设法排除它们。
最常用的判别的方法为X-D状态图法。
(1)X-D状态图法中的符号规定
在使用X-D状态图法进行障碍信号的分析判断时,为了方便,对回路中所用元件的标号有以下规定。
●大写字母A、B、C、D等表示气缸
下标“1”——活塞杆伸出;下标“0”——活塞杆退回
●小写字母a、b、c、d等表示行程阀发出的信号
下标“1”——活塞杆伸出到位所发的信号
下标“0”——活塞杆退回到位所发的信号
经过处理排除障碍后的执行信号右上角加“*”,如a1*
(2)程序框图
行程程序可用程序框图来表示气缸的动作顺序。
实验课题7的程序框图为:
用字母方式可简化为:
(3)X-D动作状态图的画法
实验课题7的X-D图为:
X-D组
1
2
3
4
执行信号
A1
B1
B0
A0
1
a0(A1)
A1
2
a1(B1)
B1
3
b1(B0)
B0
4
b0(A0)
A0
备
用
格
(4)障碍信号的判别(P.61)
根据判别方法在图3.23中可得a1和b0为障碍信号。
(5)按照上述方法请同学对回路进行重新标号,画出程序框图和X-D图,并判别有无障碍信号
2.障碍信号的排除方法
常用的方法有脉冲信号法、逻辑回路法和辅助阀法。
(1)脉冲信号法
定义:
脉冲信号消障的实质就是将有障信号变为脉冲信号,使其在使主控阀换向完成后立即消失,这样就使信号线不可能长于动作状态线,障碍也就消除了。
实例:
在实验课题中,将a1和b0这两个障碍信号设法变成脉冲信号△a1和△b0,即可得到下面消除障碍后的X-D动作状态图。
X-D组
1
2
3
4
执行信号
A1
B1
B0
A0
1
a0(A1)
A1
=qa0
2
a1(B1)
B1
=△a1
3
b1(B0)
B0
=b1
4
b0(A0)
A0
=△b0
备
用
格
△a1
△b0
回路连接:
按脉冲信号法对实验课题7进行排障,画出回路图并进行回路连接。
连接时应注意不能将行程阀安装在活塞杆行程的末端,而必须留一段距离以便使挡块或凸轮通过该行程阀。
(2)逻辑回路法
定义:
逻辑回路法即利用逻辑门的性质,将长信号变成短信号,从而排除障碍信号的方法。
利用逻辑回路排除障碍信号的常用方法有逻辑“与”排障和逻辑“非”排障。
(3)辅助阀法
定义:
若在现有回路中找不到可用来与障碍信号构成逻辑回路的原始信号时,可采用增加辅助阀的方法来排除障碍。
辅助阀一般为双气控二位三通换向阀或二位五通换向阀。
利用辅助阀的输出信号作为制约信号,通过和障碍信号的逻辑“与”来排除障碍段。
实例:
按照辅助阀法设计实验课题的辅助信号并画出相应执行信号
X-D组
1
2
3
4
执行信号
A1
B1
B0
A0
1
a0(A1)
A1
=qa0
2
a1(B1)
B1
=a1
3
b1(B0)
B0
=b1
4
b0(A0)
A0
=b0
备
用
格
回路连接:
根据所设计信号画出回路图并进行回路连接
 升级会员
升级会员 