QD75MH讲义新.docx
《QD75MH讲义新.docx》由会员分享,可在线阅读,更多相关《QD75MH讲义新.docx(30页珍藏版)》请在冰豆网上搜索。
QD75MH讲义新
定位控制的目的与用途
定位的定义
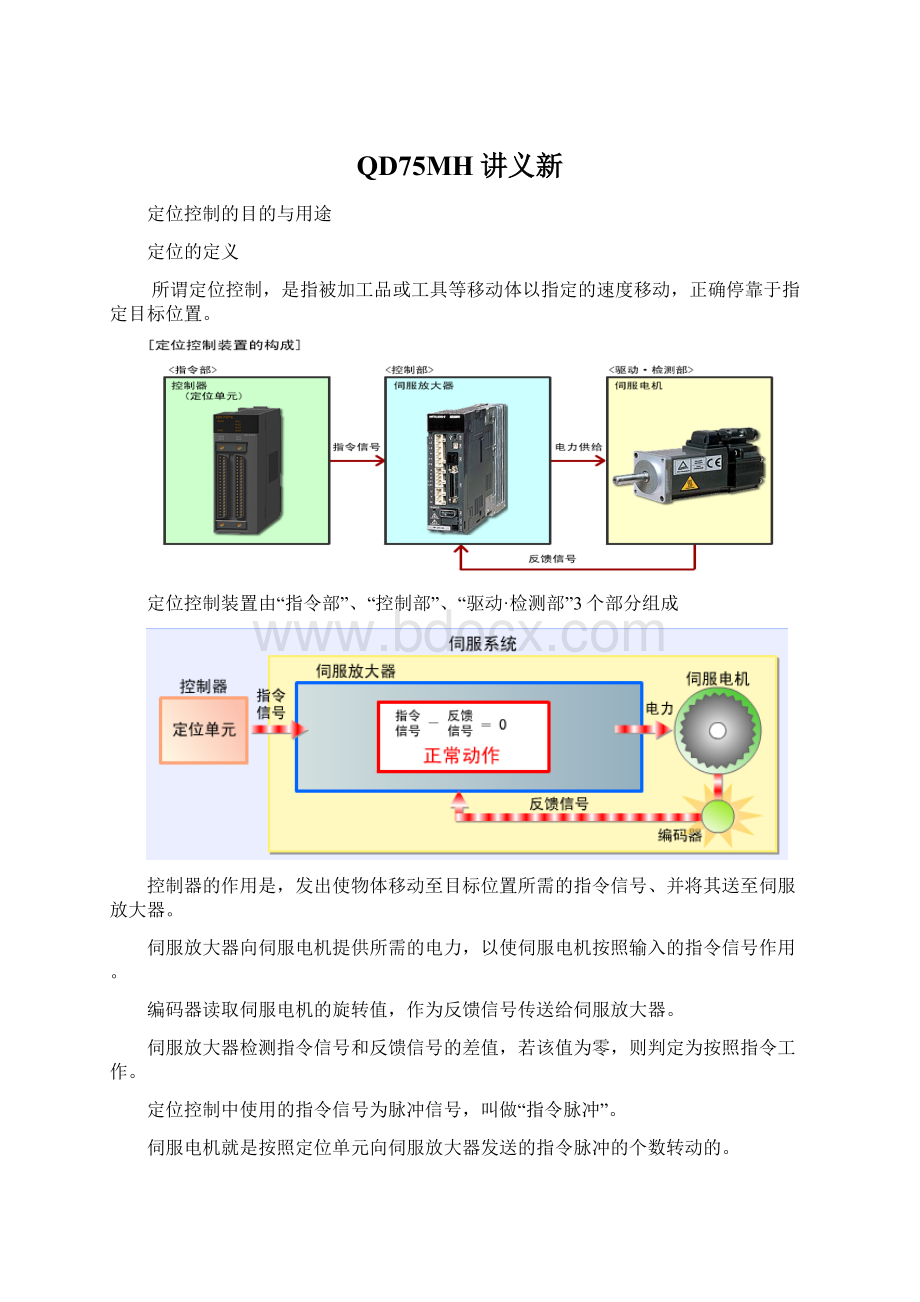
所谓定位控制,是指被加工品或工具等移动体以指定的速度移动,正确停靠于指定目标位置。
定位控制装置由“指令部”、“控制部”、“驱动·检测部”3个部分组成
控制器的作用是,发出使物体移动至目标位置所需的指令信号、并将其送至伺服放大器。
伺服放大器向伺服电机提供所需的电力,以使伺服电机按照输入的指令信号作用。
编码器读取伺服电机的旋转值,作为反馈信号传送给伺服放大器。
伺服放大器检测指令信号和反馈信号的差值,若该值为零,则判定为按照指令工作。
定位控制中使用的指令信号为脉冲信号,叫做“指令脉冲”。
伺服电机就是按照定位单元向伺服放大器发送的指令脉冲的个数转动的。
此外,单位时间的指令脉冲数叫做“指令脉冲频率”,用于控制伺服电机的转速。
指令脉冲个数,用于控制定位的位置。
定位模块特点:
1、单轴、双轴及四轴用模块,品种齐全
脉冲指令型QD75P_(1、2、4)
QD75D_(1、2、4)
数据指令型QD75M_(1、2、4)
QD75MH_(1、2、4)
2、在基板上安装QD75模块时,每个模块占用一个I/O槽,32个I/O点数,最大可以安装64个模块。
适用安装的模块
最大安装模块数
标注
CPU模块
Q00JCPU
最大8块
Q模式安装
Q00CPU
Q01CPU
最大24块
Q02以上的高性能CPU及通用CPU
最大64块
网络模块
QJ72LP25-25
QJ72BR15
QJ72LP25G
QJ72LP25GE
最多64块
MELSECNET/H的远程站
3、丰富的控制功能:
4、
a)每轴允许进行600个定位数据设定。
b)支持单独定位动作和连续定位动作。
c)支持2-4轴速度、位置插补动作。
d)提供多种控制方式及其相互切换。
e)提供4种原点回归控制方式、快速原点回归以及原点回归重试功能。
4、提供梯形加减速和S型加减速
5、能够使用智能模块专用指令。
设计了定位启动指令、示教指令等专用指令。
通过使用专用指令、可以简化程序。
6、易于维护:
(1)数据可以被保存到闪存中,断电数据不会丢失。
(2)故障容细分化,提高故障诊断效率。
(3)能够分别保存16个故障/警告信息,便于故障/警告的确认。
7、可以通过定位用软件包、对定位模块进行设定、监视以及测试。
GX-Configurator-QP
系统构成:
1、电脑与CPU之间,通过RS-232(QC30R2)或USB或LANcable通信;
2、CPU与QD75模块之间通过基板传输。
3、QD75模块与伺服放大器J3-()B之间光纤通信
4、外部开关(行程、停止、DOG、CHG功能)模块接口
QD75LED含义
软件版本要求:
与外部设备的输入输出接口
1A20/1A19/1B20/1B19手动脉冲发生器的A、B输入端子
*一个模块只能接一个手动脉冲发生器
1A15/1B15手动脉冲发生器5V电源
2A15/2B15手动脉冲发生器5V电源公共端
1A8/1B8急停开关端子
外部端子接线图
QD75存储器
QD75工作要素:
●参数设置,由系统构成决定参数设置
●伺服参数设置,由QD75控制的伺服系统决定
●定位数据设置,由动作过程决定定位数据设置
*使用GX-Configurator-QP软件设置参数和定位数据,可以简化程序编写
●使用GX-Developer编写QD75用顺控程序
1、参数设置:
基本参数1
Pr1:
单位设置,用于设定定位控制时的指令单位。
不同控制轴可以选择不同的指令单位。
▪Pr2电机旋转一圈所需脉冲个数。
等于伺服电机编码器的分辨率。
▪Pr3电机旋转一圈,外部工件行进的位移量。
▪Pr4单位倍率。
(当移动量超过表中设定围时,能够提高设定围的倍率)
▪Pr7偏置速度。
未使用,请不要设置数值。
基本参数2
Pr.8速度极限值的设置。
为执行定位运行,OPR运行等设置最大的速度。
设置最大速度时,请考虑:
电机的转速、工件的移动速度。
Pr9加速时间:
从速度0加速到最大速度时,所用的时间
Pr10减速时间:
从最大速度减速到速度0时,所用的时间
需要注意的参数:
详细参数1
软件行程
softwarestrokelimitupperlimitvalue
softwarestrokelimitlowerlimitvalue
保证工件的正常行程围,但是不能保证工件安全。
一旦QD75故障,则软件行程失效。
Forcedstopsignalvalid\invalidselection急停开关有效/无效选择
详细参数2
JOGspeedlimit
原点回归基本参数
Pr.43OPR方法。
设置“OPR方法”来执行机器OPR。
0:
近点狗方法.在近点狗ON时减速后,用零信号完成OPR。
4:
计数方法1)在近点狗ON时减速后,移动指定的距离,并用零信号完成OPR。
5:
计数方法2)..在近点狗ON时减速后,移动指定的距离,并完成OPR。
6:
数值设置方法,适用于绝对系统的原点回归方式,利用手动方式,使工作移动到目标后停止,执行原点回归。
原点回归方向:
设置起动机器OPR时位移的方向。
0:
正向(地址增量方向)向地址增加的方向进行原点回归。
1:
负向(地址减量方向)向地址减少的方向进行原点回归。
通常把OP设置成接近下限或上限。
原点地址,原点回归完成后定位开始的地址
原点回归速度,启动原点回归时的速度,不能大于速度极限值
爬行速度,接近原点时较慢的速度,小于原点回归速度
2、伺服参数设置:
1、伺服系统选择
2、控制模式选择
3、动态制动电阻选择
4、位置检测系统选择
5、伺服急停开关选择
用gx-configurator设置以上参数,通过测试模式,可以测试参数设置的是否正确。
进入测试模式:
停止CPU—GX-Configurator软件Online—Test—TestON/OFF
用测试模式建立原点、JOG运行
3、编写定位数据:
定位数据,包含一个定位过程或一个动作的相关因素,一行数据代表一个
定位数据。
QD75可以编写600行定位数据
每行定位数据由十个元素组成:
1、控制方式:
单独、连续、路径连续
2、运行方法:
绝对、相对、进给、速度、速度\位置、插补等
3、插补轴
4、加速时间:
从参数设置的4组时间中选择一组
5、减速时间:
从参数设置的4组时间中选择一组
6、定位地址
7、圆弧地址
8、定位速度
9、暂停时间
10、M代码
利用仿真功能,可以查看定位数据的时间、速度
Edit-simulation
利用测试功能,可以测试定位数据是否满足定位要求
4、书写
顺控程序
QD75MH同CPU之间信号关系
Y0:
PLCREADY
(a)该信号通知QD75,PLCCPU正常。
(b)当更改参数时,依据参数不同,PLCREADY信号变成OFF。
(c)当PLCREADY信号从OFF变成ON时执行下列处理。
•检查参数设置围。
•QD75READY信号[X0]变成ON。
X0:
QD75READY
当Y0从OFF变成ON,QD75检查参数设置,如果没有错误,则X0信号变成ON。
当[Y0]信号变成OFF或者看门狗错误发生时,X0信号变成OFF。
Y0:
PLCREADY,该信号通知QD75,PLCCPU正常
X0QD75READY
Y1全轴伺服ON
X1同步标志
OFF:
禁止模块访问
ON:
允许模块访问
•在PLC变成ON或复位CPU模块时,如果能够CPU模块访问QD75,则该信号变成ON。
•当在CPU模块的模块同步设置中选择“异步”时,该信号可以用作从顺控程序访问QD75的互锁。
X8-XB错误检测
手动运行—JOG运行
手动方式的一种。
当JOG指令信号Y8-YF导通时,QD75向伺服放大器发出连续的脉冲,工件会以“JOG速度”向指定的方向移动。
当JOG起动信号变成OFF时,运行会减速并停止。
JOG运行常用于调试、示教、DATASET方式的原点回归中。
缓冲存储器地址
项目
备注/设定围
初始值
轴1
轴2
轴3
轴4
JOG速度
保存JOG运行时的速度
在JOG运行过程中更改速度时,保存变更后的速度值
0
1518
1519
1618
1619
1718
1719
1818
1819
O.O1mm/min
10^-3inch/min
10^-3
degree/min
1pulse/s
手动运行—寸动\微动(inchingoperation)运行
手动方式的一种。
当JOG指令信号Y8-YF导通时,QD75在第一个运算周期中(1.7ms),发出控制伺服系统的脉冲,工件向指定的方向运行微小距离。
缓冲存储器地址
项目
备注/设定围
初始值
轴1
轴2
轴3
轴4
点动移动量
设定点动运行时的移动量。
设定值为“0”时,执行JOG运行
0
1517
1617
1717
1817
0-65535*
10^-1um
0-65535*
10^-5inch
0-65535*
10^-5degree
0-65535pulse
定位启动用程序:
1、专用指令启动
软元件
名称
设置容
设置方
(s)+0
系统用区域
-
-
(s)+1
完成状态
0:
正常完成
0之外的数字:
错误代码
系统
(s)+2
启动容
1—600定位数据
7000—7004块启动数据
9001机械原点回归
9002快速原点回归
9003当前值变更
9004多轴启动
用户
简单的程序
详细考虑的程序
XC-XF轴1-轴4BUSY信号
OFF:
不BUSY(非工作状态)
ON:
BUSY(工作状态)
X4-X7轴1-轴4M代码
当M代码ON的时候,启动定位,会出现错误。
2、缓存地址与启动信号结合使用
缓冲存储器地址
项目
备注/设定围
初始值
轴1
轴2
轴3
轴4
启动定位数据编号
K1-600定位数据启动K9001原点回归K9002快速原点回归
K7000-7004块启动K9003当前值更改K9004多轴同时启动
0
1500
1600
1700
1800
用户设定
Y10-Y13轴1--轴4定位起动信号
OFF:
未请求定位起动
ON:
请求了定位起动
•起动OPR运行或定位运行。
•定位起动信号在上升沿时有效,并且起动运行。
•当BUSY期间定位起动信号变成ON时,会发生运行起动警告(警告代码:
100)。
简单的程序
考虑完整的程序
X10-X13轴1-轴4起动完成信号
OFF:
起动未完成
ON:
起动完成
多种多样的控制方式
ABS绝对定位
INC相对定位
固定进给
速度控制
原点回归
原点回归控
 升级会员
升级会员 