弹簧挂锁的建模及仿真.docx
《弹簧挂锁的建模及仿真.docx》由会员分享,可在线阅读,更多相关《弹簧挂锁的建模及仿真.docx(16页珍藏版)》请在冰豆网上搜索。
弹簧挂锁的建模及仿真
1、建立夹紧机构模型
1、启动ADAMS/View
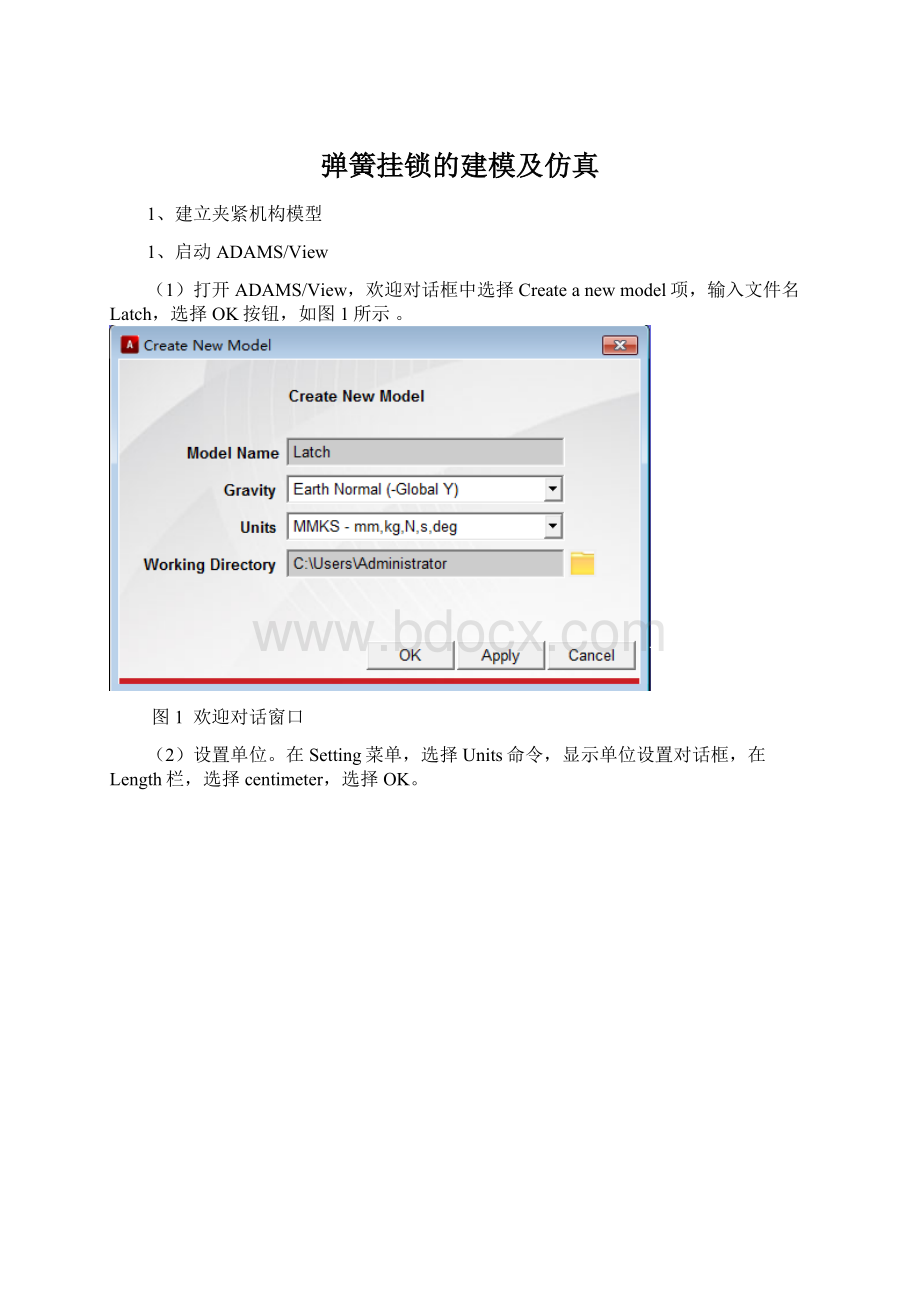
(1)打开ADAMS/View,欢迎对话框中选择Createanewmodel项,输入文件名Latch,选择OK按钮,如图1所示。
图1欢迎对话窗口
(2)设置单位。
在Setting菜单,选择Units命令,显示单位设置对话框,在Length栏,选择centimeter,选择OK。
(3)设置工作栅格。
在Setting菜单,选择WorkingGrid命令,显示工作栅格设置对话框,设置:
size=25,spacing=1,如图2所示,选择OK按钮,设置好工作栅格。
图2设置工作栅格对话框
(4)设置图标。
在在Setting菜单,选择Icons命令,显示图标设置对话框,在NewSize栏,输入2.
(5)按F4键显示坐标窗口。
(6)在File菜单选择SelectDirectory命令,设置ADAMS默认存盘目录。
2、建立夹紧机构模型
(1)创建参数点。
在工具箱几何建模工具集,选择Point工具
,使用默认设置,如图3所示。
根据表1的坐标值,产生A、B、C、D、E、F6个设计点,如图4所示。
图3图46个设计点
设计点
变量名
x坐标
y坐标
z坐标
A
POINT_1
0
0
0
B
POINT_2
3
3
0
C
POINT_3
2
8
0
D
POINT_4
-10
22
0
E
POINT_5
-1
10
0
F
POINT_6
-6
5
0
(2)创建摇臂(pivot)。
在工具箱几何建模工具集,选择工具
,在参数设置栏设置Thickness=1,Radius=1。
依次选取POINT_1、POINT_2及POINT_3、POINT_1四点,按右键创建摇臂,如图5所示。
图5摇臂模型
鼠标右键,选择part:
PART_2,再选择Rename,输入新名.Latch.pivot
(3)创建手柄(handle)
在工具箱几何建模工具集,选择工具
依次选取POINT_3、POINT_4创建手柄,如图6所示。
鼠标右键,选择part:
PART_3,再选择Rename,输入新名.Latch.handle。
图6创建手柄后的模型
(4)创建锁钩(hook)
在工具箱几何建模工具集,选择工具
,在Length中输入1,根据表2给出的坐标值,依次选取各点(若是点不好选可按住ctrl),鼠标右键完成创建滑钩,如图7所示。
鼠标右键,选择part:
PART_4,再选择Rename,输入新名.Latch.hook。
点坐标
x坐标
y坐标
z坐标
1
5
3
0
2
3
5
0
3
-6
6
0
4
-14
6
0
5
-15
5
0
6
-15
3
0
7
-14
1
0
8
-12
1
0
9
-12
3
0
10
-5
3
0
11
4
2
0
图7创建钩锁后的模型
(5)创建滑杆(slider)
在工具箱几何建模工具集,选择工具
依次选取POINT_5、POINT_6创建滑杆,如图8所示。
鼠标右键,选择part:
PART_5,再选择Rename,输入新名.Latch.slider
图8创建滑杆后的模型
(6)创建加紧固定支架
在工具箱几何建模工具集,选择工具
,由NewPart改为OnGround,依次选取(-2,1,0,)、(-18,0,0)创建固定支架,如图9所示。
鼠标右键,选择Block:
BOX_11,再选择Rename,输入新名.Latch.ground.block。
(7)创建铰链副
在A点处将摇臂与基础框架连接。
在主工具箱的连接工具集,选择铰链副
,在参数设置栏选择
,
,选取Point_1点。
添加滑钩与摇臂铰链副。
在主工具箱的连接工具集,选择铰链副,在参数设置栏选择
,
,依次选择摇臂(pivot)、滑钩(hook)及Point_2点,完成设置。
添加手柄与摇臂铰链副,选取铰链副后选择摇臂(pivot)、手柄(handle)及Point_3。
添加滑杆与手柄铰链副,选取铰链副后选择滑杆(slider)、手柄(handle)及Point_5。
添加滑杆与滑钩铰链副,选取铰链副后选择滑杆(slider)、滑钩(hook)及Point_6。
(8)添加点—面约束副(低副)
局部放大滑钩,在Build菜单选择Joint,显示连接对话框,如图9所示。
选择工具
,在参数栏设置
,
。
依次选取固定支架(ground.block)、滑钩(hook)、点(-12,1,0),竖直向上拖动鼠标,按下左键。
图9约束库
(9)创建弹簧
在主工具箱施加力工具集选择拉压弹簧阻尼器工具
。
输入K=800,C=0.5。
选取点(-14,1,0)处滑钩顶点,注意应选取钩上的顶点上(hook.Extrusion_9.v16),而不是坐标点上,再选取(-23,1,0),如图10所示。
图10创建弹簧后的模型
(10)创建手柄力
在主工具箱施加力工具集选择单作用力工具
,设置SpaceFixed,PickFeature
及Constant,选择Force,输入80。
依次选取手柄(handle)、手柄末端点(handle.Marker_5)
、点(-18,14,0),如图11所示。
图11创建的夹紧机构模型
(11)保存模型
完成创建,保存数据库。
完成建模后的夹紧机构模型,如图11所示。
在File菜单,选择SaveDatabaseAs命令,输入文件名:
Latch.bin选择OK按钮,保存数据。
(12)仿真观看观看当前模型的运动情况
在主工具箱,选择仿真工具
,取EndTime=1.0,Step=50,开始仿真分析。
2、运动仿真分析
1、测试模型
(1)设置弹簧力的测量
在弹簧处鼠标右键,在弹出菜单中选中选择Spring:
Spring_1,再选择Measure,显示施加测量对话框,将Characteristic选项设置成Force,如图12所示。
选择OK按钮,显示弹簧力测量窗口。
图12测量对话框
(2)角度测量
在Build菜单选择Measure项,再选择Angle,最后选择New,显示产生角度测量对话框。
在MeasureName栏,将测量名称改为overcenter_angle。
在FistMarker栏,按鼠标右键选择Marker,再选择Pick。
选择在Point_5处的任意一个标记(Marker)。
在MiddleMarker栏,按鼠标右键选择Marker,再选择Pick。
选择在Point_3处的任意一个标记(Marker)。
在LastMarker栏,按鼠标右键选择Marker,再选择Pick。
选择在Point_6处的任意一个标记(Marker)。
设置完成如图13所示。
选择OK按钮,显示角度测量窗口。
图13角度测量对话框
(3)样机仿真分析
在主工具箱,选择仿真工具
,取EndTime=0.2,Step=100。
选择按钮
开始仿真分析。
测量结果可以显示结果,如图14、图15所示。
图14弹簧力测量曲线图
图15角度测量曲线图
(4)创建角度传感器
在Simulate菜单选择Sensor,再选择New,显示创建传感器对话框,如图16所示。
在对话框中设置或选择,按照图16设置。
选择OK按钮,完成创建传感器。
图16创建传感器对话框
保存当前数据,在File菜单。
选择SaveDatabaseAs命令,输入文件名:
test,选择OK按钮,保存数据库。
(5)进行样机仿真
在主工具箱,选择仿真,工具
,取EndTime=0.2,Step=100。
选择按钮
进行分析。
仿真时测量窗口显示如图17、图18所示的测量结果。
夹紧系统在80N恒力作用下,由于传感器的作用,使得手柄到达角度(overcenter_angle)等于0时停止仿真分析。
图17、图18反映了在最后一次仿真分析中,夹紧力(Clamping)及角度(overcenter_angle)随时间的变化曲线。
图17弹簧力随时间的变化曲线
图18角度随时间的变化曲线
2、验证模型
(1)导入实验数据
在File菜单,选择Import,显示输入对话框。
在Filetype栏,选择TestDate,选择CreateMeasure选项。
在FiletoRead栏,鼠标右键,在弹出式菜单中选择Browse,选择MSC.Software的安装目录:
aview/examples/latch/test_dat.csv。
在Model_Name文本输入.Latch,如图19所示。
选择OK,读入实验数据。
图19导入实验数据对话框
(2)绘制实验数据曲线图
在Review菜单,选择Postprocessing...命令进入后处理程序。
在窗口左上方选择Plotting;在控制区,选择Measures,在Simulation列表中选择test_dat;在IndependentAxis选项中选择Data,在对话框中选MEA_1,选择OK。
在Measure列表选择MEA_2;选择AddCurves按钮,绘制实验数据曲线图。
(3)修改实验数据曲线图
在窗口左侧的对象结构关系栏,选择Page_1下属的plot_1项;在参数特性编辑区设置标题栏Title=LatchForcevs.HandleAngle。
选择haxis项,在参数特性编辑区设置y轴标题Label=Degrees。
选择vaxis项,在参数特性编辑区设置x轴标题Label=Newtons。
(4)仿真曲线图
在控制面板区,在Simulation列表中选择last_run;在IndependentAxis选项中选择Date,在显示的对话框选择overcenter_angle。
在Measure列表中选择Spring_1_MEA_1;选择选择AddCurves按钮,绘制仿真数据曲线图,如图20所示,实验曲线图与仿真曲线图能较好地吻合。
(5)保存数据文件
按F8退出Postprocessor界面,然后在File菜单中选择SaveDatabaseAs,输入文件名:
va-lidate.bin。
图20实验和仿真数据曲线图。
 升级会员
升级会员 