creo运动仿真教程.docx
《creo运动仿真教程.docx》由会员分享,可在线阅读,更多相关《creo运动仿真教程.docx(25页珍藏版)》请在冰豆网上搜索。
creo运动仿真教程
连接类型
机构的连接:
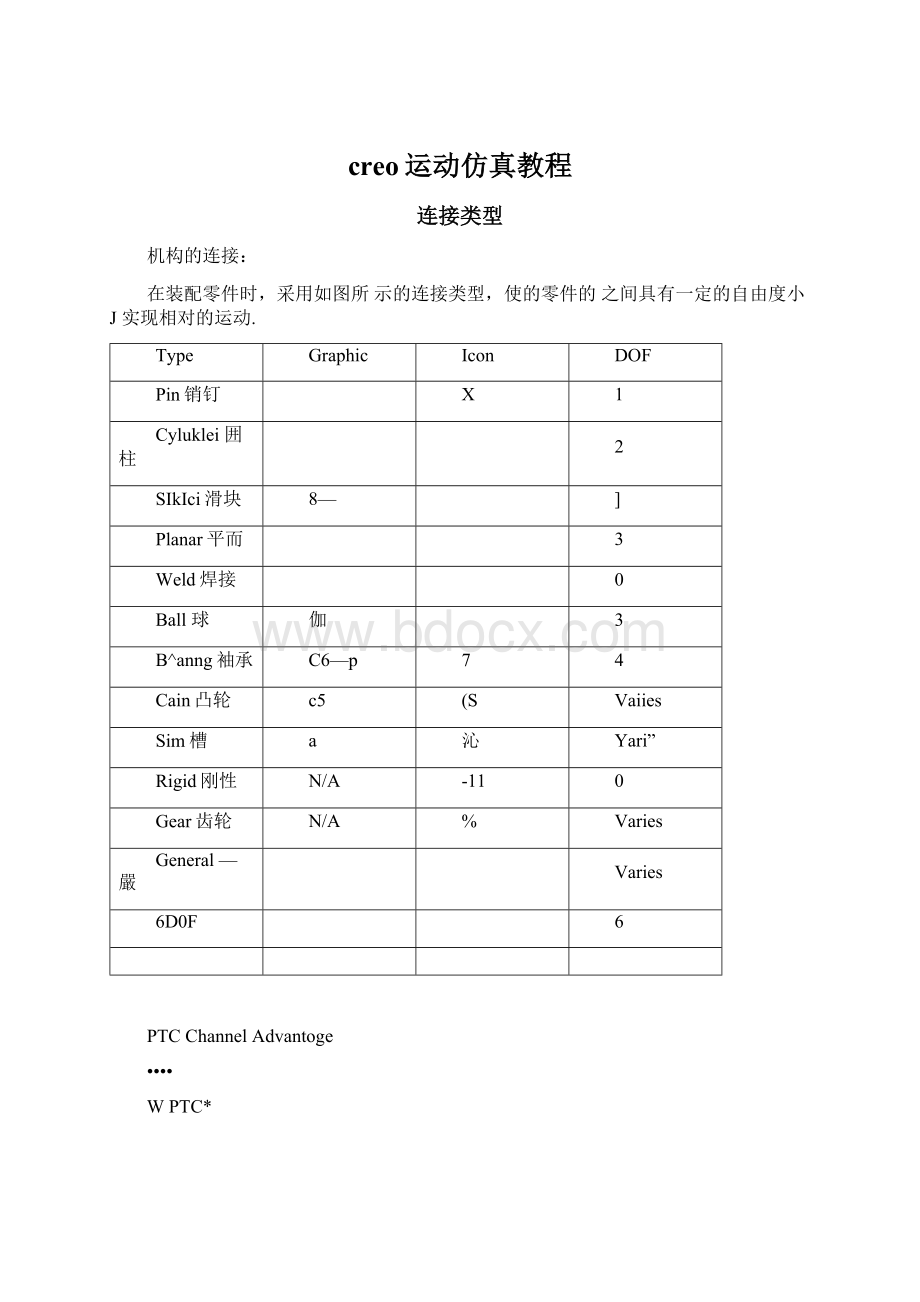
在装配零件时,采用如图所示的连接类型,使的零件的之间具有一定的自由度小J实现相对的运动.
Type
Graphic
Icon
DOF
Pin销钉
X
1
Cyluklei囲柱
2
SIkIci滑块
8—
]
Planar平而
3
Weld焊接
0
Ball球
伽
3
B^anng袖承
C6—p
7
4
Cain凸轮
c5
(S
Vaiies
Sim槽
a
沁
Yari”
Rigid刚性
N/A
-11
0
Gear齿轮
N/A
%
Varies
General—嚴
Varies
6D0F
6
PTCChannelAdvantoge
••••
WPTC*
销钉连接
11拄连接
连接类型
销钉连接mdo\connections\pin&cylinder
♦轴对齐/插入曲面
.平面匹配/对齐或点对齐(径向)
汪:
即允许绕着指定的轴逬行旋转的连接•共1个自由度.
注:
即允许绕着指定的轴迸行旋转和平移的连接,共2个自由度.
滑块连接
平面连接
连接类型
滑动杆连接mdo\connections'slider
♦轴对齐/插入曲面
♦平面匹配/对齐或点对齐帥向)注:
即允许沿着指定的轴逬行平移的连接总共1个自由度.
平面连接mdo\connections\plane
♦平面匹配/对齐
汪:
即允许沿着1轴旋转和沿2轴方向平移总共3个自由度.
PTCChannelAdvanlogc
•••••
WPTC*
连接类型
焊接连接
两个坐标系对齐,元件自由度被完全消除。
连接后,元件与组件成为一个主体■相互之间不再有自由度。
如果将一个子组件与组件用焊接连接
,子组件内各零件将参照组件坐标系按其原有自由度的作用。
总自由度为0。
刚性连接
使用一个或多个基本约束,将元件与组件连接到一起。
连接后,元件与组件成为一个主体,相互之间不再有自由度.如果将一个子组件与组件用刚性连接,子组件内各零件也将一起被"粘〃住,其原有自由度不起作用。
总自由度为0。
连接类型
常规连接
其自由度也是不固定的,视定义的方式,可能拥有各种自由度.
6DOF连接
连接可绕3轴进行旋转和平移运动.它没有任何方向的约束,总自由度为6个•若要定义6DOF连接,我们需要选取零件和组件上的坐标系.
拖拽
当农快.怜
ifclf
他I嫉I
当机构连接好以后,可以通过拖拽功能,使元件间产生相对运动.
使用快照
使剃拖动“(Dfdg)对话框中的•快照气Snapshots)迭项卡可显示不同配置组件的己保存快範的列表。
擀元件移至所需位置厉,可保存俎件在不同位置和方向的快弗。
快黑将轴舷有的榄定主体、禁用的连接和几何的轧
注蛊放豐元伴时可噸“拖话丫Deg)命令和拍取,快照。
使用约耒
便用“搭动昭Drag)对话性中的呷|東"(Constraints)选项卡应用或移疏约束。
应用纯束后,它的名称色添加到绚束列表中。
通过迭中我清除釣束:
旁的复选曆可打开和关闭妁束。
愎用快擡菜单可复制、英切、粘贴或删除约衷。
拖拽
拖动点
1.单击S打开“梅动"(Drug)和框。
2.阜击H躺在当甫模型中的主依上选取要施动的直。
出现指示鍰E権动换作过程中,陇的点在保挣逹接的同时跟随指就移动。
注意:
不縦取基础进行点也动。
3.移动指针。
选定的点』锻指针位置。
4.宴完成0噪作,请执行下列爆作之一:
0单击以接受兰前主体位置并开始拖动算它主休。
0中锋旦击结東当前拖动操作(主体返回初始位置)并开始新阿柜动操作。
0石纔笙击结東施动操作〔主体返回初始位置)。
拖拽
拖动主体
拖动主依时,棊在图形窗口中的位黄会谀变,但具方向将保特⑧定。
如泉裝配希宴主体在僮叠改变曲情说下垂新定向,則该主体捋不会移动,因为在烦位置模型轉无法重新装配。
如果发找种悔凡就尝弑便用点梅移来代靳
1.鱼击S>打开・施动"(Dreg)对话観
2.单吉S并在当前欖型上选取主体。
3.移动指治选定的主制鱷指钳违。
4.妾克械撮作,诣执行下列燥作之一,
0单击以接受当繭主体縫并开城抠动其它主体。
0朋单击11岀当前的齣操作(主体删初如'违)并刑白新的册作。
0右怦单击迪岀舸嫌作(主体返回机始位置)。
PTCChannelAdvantoge
连接轴设置
-匚oanectiod】I
••••
H:
:
:
:
:
.PTC*
当ST位口
I-n~3
r
再生伯
»I|oa)
|jeo.QOjJ
jftfi移动m«ti
11
PTCChannelAdvantage
2wrT<
连接轴设置
连接轴运动到约束位置时,可使用定义的还原系数仿真冲击力,也称恢复系数.
O前摩擦系数电一运动开始前阻止连接曲面相对运动的摩援力。
允许值:
介干1与0之间。
O动摩擦系数叶一阻碍连接曲面自由地相对运动、减缓运动的摩擦力。
允许值:
介于1与0之间。
O接触半径(旋转半径)從一运动轴与接触点的距离。
该值应大干
高级连接类型
高级连接类型包括:
槽连接、凸轮连接、齿轮连接
槽连接与凸轮连接的对比
凸轮
槽
运动空间
2D
2D/3D
主参照
曲线/曲面
曲线/曲面
次参照
曲线/曲面
点
高级连接类型
凸轮连接:
釆用凸轮连接,当元件cm旋转时,从动元件follower
跟随一起运动.,
cam
Follower
PTCChannelAdvantage
c•系统不会自动处理曲面(曲线)中的尖角/拐点/不连续,如果存在这样的问题,应在定义凸轮前适当处理。
凸轮可定义“升离”.“恢复系数”与“磨擦”o
凸轮连接
需要注意.
斤所选'曲面只能是单向弯曲曲面(如拉伸曲面),不能是多向弯曲曲面(如旋转岀来的鼓形曲面)。
2d
凸血|mz|恋性|—曲耐曲遽-
上―自动选取
凸轮连接
D.当钩上附选框中的自动选取后,选取曲面时将自动将与之相切相邻的所有选上,如果曲面间不相切,将无法选取.
E•可以选取平面作为凸轮曲面,但需要指平面的深度的参照.
歸醍|用性j
\』:
FMXWE3arCI.fia
厂
深度参照
凸轮连接
宦复系煞取决千材料虫性.主体几何以及?
1担越等因耒。
対机构应用恢复系蝕可在刖庠计算中便㈣用眩属性。
洌效,充全淳性mm复系敷为1。
充全非葺性改建的便复无兹为Oo榜皮琲的條豆系散相时皎高。
而巒呢土块的恢耳至恶13接近0。
PTCChannelAdvantage
•••••••
WPTC*
凸轮连接的范例
根据左侧图的运动要求,采用连接装配机构
Follower.prt
PTCChannelAdvonfoge
凸轮连接的范例
新建一组件文件cam首先,设置工作目录到机构运动仿真
\connections\cam目录下.
新建一组件文件,输入名称为cam〉确定
>选取模板mmns_asm_design>确定
金用名菲」
gg]
PTCChannelAdvanlogc
凸轮连接的范例
1装配第一个零件camframe.prt
>cam_frame.prt>缺省
凸轮连接的范例
3装配第三个零件follower.p
>follower.prt
凸轮连接的范例
凸轮连接的范例
5进入机构模块
应用程序〉机构
PTCChannelAdvantage
•••••••
WPTC*
凸轮连接的范例
生成分析的测量结果
定义阻尼定义力/扭矩
定义凸轮连接
定义齿轮连接
■连接图标显示
定义何服电机
定义重力
定义执行电机
定义弹赞
定义初始值
定义质屋属性
凸轮连接的范例
kmicra
|n帀和右面
iTOLLff/ZR-
PTCChannelAdvantage
)••••••I
••••••••■•••••••••♦
••••
凸轮连接的范例
KWlirtfxiMXK
perTiflotajI
|一-
]
zwrT<
PTCChannelAdvanloge
辽匚:
・PTC*
凸轮连接的范例
血"山ccl
输大终」
F"
PTCChannelAdvantage
凸轮连接
凸轮连接注意点:
凸轮连接中曲面/曲线必须是光滑、曲率连续的曲面/曲线。
2、每个凸轮只能有一个从动件,如果要为一个具有多个从动件的凸轮
建模必须为每个凸轮连接副定义新的凸轮从动机构连接。
3、可以再拖拽操作中使用凸轮连接。
4、凸轮连接不能防止凸轮倾斜,必须对某一元件定义附加连接副,防止倾斜。
槽连接
关于槽从动机构连接
槽从动机构是两个主体之间的点■曲线纯束。
主体1上有一条3D曲线(槽八主体2上有一个点(从动机构)°从动机构点在整个三维空间中都随才曹运动。
可使用一条开放或闭合曲统来定义槽。
槽从动机构会将从动机构点约束在定义曲线的内部。
如果希望楕曲线比缺省端点建义的值更小,可定义槽端点。
⑴机•檢设计1%检查包括从动机构点和槽曲线的几何上的干涉o不必确保槽和槽从动机构
几何正奸拟台在一起。
横从动机构连接中的从动机构点
选取从功机枸点时,切记:
•从动机构点必须在一个和掃曲线不冋的主体上6
•可以选収一个花准点或一个顶点。
•基准点必须层于一个单独的主体-组件级基准点不能用作从动机构点。
•要创建妄件级基准点,不必关(fl或再生组件。
打开尊件并定义点。
关闭零件时,组件中的主体将色含刚创建的
PTCChannelAdvantage
槽连接
槽从动机构连接中的槽端点
可以为槽端点选取基淮点、顶臥曲线/边及曲面。
如果选取曲线、边或曲面9槽城点则位于所选图元和懵曲线的交点处。
如果不选取端点,權从动机柯的缺省端点就是为槽所选的第一条和圧后一条曲线的盘末端。
如果为椅从幼机构迭取一务闭合曲线,或选取形成闭合环的一系列曲线,则不必寸旨定端点。
隹是,如果选择在一闭合曲线上定义端点,则最线情将是一t开口槽。
单击*反向"(Flip)未指定原始闭合曲线的哪一部分将成为开口榕。
如果要删除端点选择,则戲击•■清除-(CI盟「”
槽连接
植从动机构连接中的曲线
可以选取下列任一类里的曲线来定义他
•平面蚊非平曲曲线
•边
•基准曲线
•开放
•封闭
所送曲线必须相邻,但不必是平滑曲线。
可选取多务•不连续的曲线。
槽连接范例
设置工作目录到机构运动仿真\connections\solt目录下.
齿轮连接
关于齿轮副
使托齿轮副可控帯肠个连接轴之间的速度关系。
齿轮副中的每个齿轮都需要有阴个主体和一个孩头连養。
第一主体(指定为托姿)通常保持固定不动。
第二主体能够运动,板据所仓健的齿轮副的类型,可称为齿轮、小齿轮或齿条。
齿轮副连接可约束两个连接轴的速度,但是不能约束由孩头苣接的主体的相对空间方位。
如果要改变齿轮副中主体的方位,以满足机构中的其它实际约束,以便干组件再生或指定伺服电动机轮陥可使用"拖动”(Drag)对话框为齿轮畐忡的齿轮主休氐置开始方向。
还可更改运动轴的设置。
在齿轮劃中,两个运动主体的表面不必相互接组嫩可工作。
因为齿轮副枝视为速度约束•并非基于模型几何,因此可直接指定齿轮比。
这就意叹着您可以很容易地更改齿轮比,而不必创逢新的几何。
机构中如果有齿轮副,贝冋能会影响涉及到质量的分析(包括动态分析.力平衡分析或诽态分析)的分析结臬。
可创淫两种类理的齿轮副:
•标准(Stand込rd)-同向或反向歡两个齿轨例她模拟宜齿圆柱齿轮或眾杆银轮。
•齿条与水吉轮(RackandPinion)-将旋转运动转换为平移运动。
齿轮连接
|1470588ZS29
|GeArFMrl
flftlI«5&2屈性I
I用尸忧叟的
托乗主体
厂券^蛀向亀托莹主保
號」・
S$&kt用户定文的节圆直径
2d
I用户定义的
操作演示
PTCChannelAdvantage
3).
—定义伺服电机
丄「
—定义重力
定义执行电机
—定义弹簧
—定义阻尼器
沪■
—定义力/扭矩
动态图元
动态图元:
包括伺服电机、执行电机、弹簧.重力.阻尼、力\扭矩、
关于伺服电动机
使斥伺服电动机可規定机构以椅定方式运动。
伺服电动机引起在两个主体之间、单个自由度內的特定类理的运动。
向模理中添加伺服电动札以便为分析做准备。
伺服电动机将位星速虞或加速度指定为时间的函蝕并可控制平移或菜转运动。
例如伺胆电动机从某持定的配置开始。
一如之后,为谟2L定义另一配董。
两看乙何的差异即为模型的运动。
通过指定伺服电动机函熱如當鼓或线性函勲可以定文运动的轮酿从预定义的函数中进行送取,也可输入自定义的函数。
可在一个图元上定文任意多个何服电动机。
动态图元
SwrvoVbtori
11Crcinee11
从动B3元
广几何
凶
|
厂竝88
厂力血滾
r在单猥酬申
可以在运动轴或几何图元〔如,宰件平面.基准平面和点)上放置下列类型的何服电动机I
•运动轴伺服电动机(MotionAxisServoMotors)-用干创建臬-方向上明砒文的运动。
•几何何IK电动机(GeometricServoMotors)-用于创逢复杂的3D运动・如堤旋线或其它空间曲线。
动态图元
PTCChannelAdvantoge
动态图元
关于执行电动机
使用执行电机可向机构施加特定的负载。
执行电动机引起在两个主体之间.单个自由度内产生特定类型的负荷,执行电动机通过对平移或旋转运动轴施加力而引起运动。
动态图元
关于阻尼器
阻尼器是一种负荷类型,可创建它用来模拟机构上真实的力。
阻尼器产生的力会消耗运动机构的能量并阻碍其运动。
例如,可使用阻尼器代表将液体椎入柱腔的活塞减慢运动的粘性力。
阻尼力贻终和应用该阻尼器的图元的速度成比例,且与运动方向相反。
•盘瑕粪住(Rnferencetype)-遶肛宴应用的尼瘵券21及菇相血
的舉照图元。
O运动轴(MotionAxis)-左运功牝上应用阻尼殆选取―MSQ)
轴作対步頤国元。
O点至点(PointtoPoint)-MfgS应用到两个未通过棧头相雄俟的主臥可迭取两个札PJ个顶点或一个点及T侦点作为歩
o4ft(Slot)-在4•从紡机构上豐用逼尼浪迭妙L个惜从动机拘连接作曲空韻圈元。
•耳性(Properties)-为阻尼丑魏C指定一*值.
阻用系做殳以下枝达Jt的坦成成分,该农达It定义和遽虞有关餉力的01
力=Cx速度
动态图元
关于重力
用来模拟重力对机构运动的影响.
动态图元
关于力/扭矩
可以应用力或扭矩来模拟只揪构运动的外部彩响。
力闹矩通常表示机构与另1主体的动态交互作月、并且昱在机构的零件与机构外部实体孩触时产生的。
力总表现为椎力或拉力,它可导致对象改变其平移运动,例如,手指推盒干的
力将使盒干根据推力的方向移动。
扭矩是一种旋转力或扭曲力,如在盒千顶部
施加的使其进行旋转的力。
力/扭矩定义
•超(T¥P0)■渝宴删肋的类型和力的绑图元
0点力(PointForce)注取主休上的一锯応一点或應任为枝細元。
0主体祖拒(BodyTorque)•为通过质心的麵敕主林为舞因元。
0点对点力(PointtoPointForce)-送取位千稠主休上恫点或15点作为挪图元.励花反方向上作砸乐脈为対擔1O朋珮点,其值为正0惓蚯翅动軌川翱鈕合,则劾的助矢第-个点砂的歸,第二*斂1指示力的方臥也勵亦第显耕用于騎觥Y主体上的力删。
动态图元
•模(Magnitude)-指定力/力矩的模。
•方向(Direction)-指定力/力矩的方向。
当选取“点对点"(PointtoPoint)作为力的类型时,此选项卡不可用。
定义方向(DwfiriQDirectionby〉
O密人的向堡(TypedVector)・选择坐标系并満入坐标以芥示向童的方向。
可选取LCW或WCS.
o克边、AB线彌(StraightEdge,Curve,orAxis)・在主体上送取宜边、曲线或轴・沿若或平行于选尢的方向雄向昱使用■反(V(Flip)未反轄力朋矩的方向。
O点至直(Point-to-Point)-选取主休上的衲个点或顶点来瑁示向童的方向。
使用•反U广(Flip)殊丘输力悩矩的方向。
方向10对干(DirectionRelativeto)
O基础(Ground)相对千固定基础主低的方佝创珈力加氐
O主休(Body)-厢对干移动孝幷的方向句睦尢嗣矩。
PTCChannelAdvantage
机构分析与测量
机构分析
动态
仪定的S1元
静态
使置运动学
动态
静态力平衡
力平衡
PTCChannelAdvanloge
2wrT<
歸刖心;沏pg
机构分析
关于位習分析
或"分析■(Analysis)>❾机构分析"(MechanismAnalysis)未处理分析。
位董分析在以甬版本的““机械设计”中称北“运动"分析或“'垂复组件”分析。
它是由伺服电动机驱动的一系列俎件分析。
只有运紡轴或几何伺服电动机可进行位置分析。
为位置分析潦加电动机时,执行电动机不会出现在可送电动机的列表中。
位蓋分析模拟机构运动,満足何那'电动机轮席和任何接头.凸轮从动机林梧从动机柯或齿轮副连接的要求,并记录机构中各元件的位置数据。
在进行分析时不考虑力和质蚩因此,不必为机构指定质量屈性。
模型中的动态图元,如弹黃、阻尼器、重力.力方丑矩以及执行电动机等,不会老响位置分析。
便用位置分析可以讶究:
•元件随旳问而运动的位置
•元件间的干涉
•机构运动的轨迹曲线
机构分析
关于运动分析
单击或■分析R(Analysis)>"机构分析刀(MechanismAnalysis)来处理分析。
便月运动分析可评估机构在伺服电动机驱动下的运动。
可以使用任何具有一定轮廂.能产生百限加速度的运动轴伺服电动机。
运动学是动力学的一个分支,它夸虑陳质量和力之处的运动所育方皿运动分折会倭似机构的运动,満足何朋.电动机轮席和任何接头.凸鸵从动机忆槽从动机构或吿轮副逹接的姜求。
运动分忻不老虑受力。
因此,利攪用执行电动机,也不必为机构揩定质堡属性©楔里中的动态图元,如弹勲阻fg酩垂力、力/力矩以及执行电动机笹•不会影响运动分析。
如果伺廉电动机具有不连缤轮廓・“机械设计"在运行运动学分析前会会试使其轮凉连续。
如果本歎件不盲旅具轮廉连缤,则电动机将不能用干分析。
便用运动分析可获狷洪下仮创
•几何图元和连修的住畫、速廣以及加速度•元件间的干涉
•机构运动的轨迹曲繙
机构分析
关于静态分析
单击L£J或"分析■(Analysis)>“机构分祈"(MechanismAnalysis)来处理分析。
静态学是力学的一个分支•研丸主体平衡时的畫力状况。
使用移态分析可确定机构在祇賀己知力时的状态。
"机械设计"会搜索配置,其中机构中所有负荷和力处干平衡状态,并且势能为尊。
静态分析态分析能更快地识^出静态配墊因为静态分析往计算中不考虑速度。
示例:
静态分析
静态分析的结果为一稳建状态配置。
在运行静态分析前,须考虑下列示例,
•M-举到一初始高度的崔锤・其静态位置为摆轿的最低点,在该点上所有的力均平衡且势能为零。
揺锤不会教在动态分析中那样摆动。
机构分析
•反弹球-将球举到平面以上某一初始高度然后释放,其静态位置为球静止在此平面上时的位置,在此位置处所有的力均平衡且势能为零。
在11匕靑况下,静态配置不考虑受撞击后球的反弹。
关于力平衡分析
力平衡分析可求出要是机构在特定形态中保持固定不动所需的力.
关于动态分析
单击[2x1或"分析"(An"机梅分析"(MechanismAnalysis)来处理分析o
动态分析是力学的一个分支,主荽研究主体运动(有时也研究丰衡)时的受力情况以及力之间的关系。
使用戢态分析可研究作用于主体上的力.主体质量与主体运动之间的关系。
运行动态分析时应切记以下要点,
•基于运动轴的何服电动机在动态分析期阊都处于活动状态。
因此.从分析时域导出的•从刃
(From)和壬(To)将显示曲不可網耘的•开始”(Start)和•终止"(End)值。
•可添加何腿电动枷用执行电动机。
•如杲伺朋电动机或执行电动机具有不连续轮愿“机械设计”在运行动态分析前会尝试便其轮廊连埃。
如果不能使其轮•瞇無则电动机将不能用千分析。
•可侵用•外部负#T(ExtLoads)选项卡添加力/力矩。
•可君虑或忍略重力和摩擦力。
在开始动态分折时,通过指定持续时间为辱并照常运行,可计算位蚩.逸度、加速度和反作埔力。
系统会自动确定用干计算的合适的时间间隔。
如果用图形表示分折的测量结杲,则图形将只包含一条线。
 升级会员
升级会员 