PID使用手册.docx
《PID使用手册.docx》由会员分享,可在线阅读,更多相关《PID使用手册.docx(11页珍藏版)》请在冰豆网上搜索。
PID使用手册
位置模式的设置与使用:
1.模式设置
修改控制模式为位置模式,具体操作:
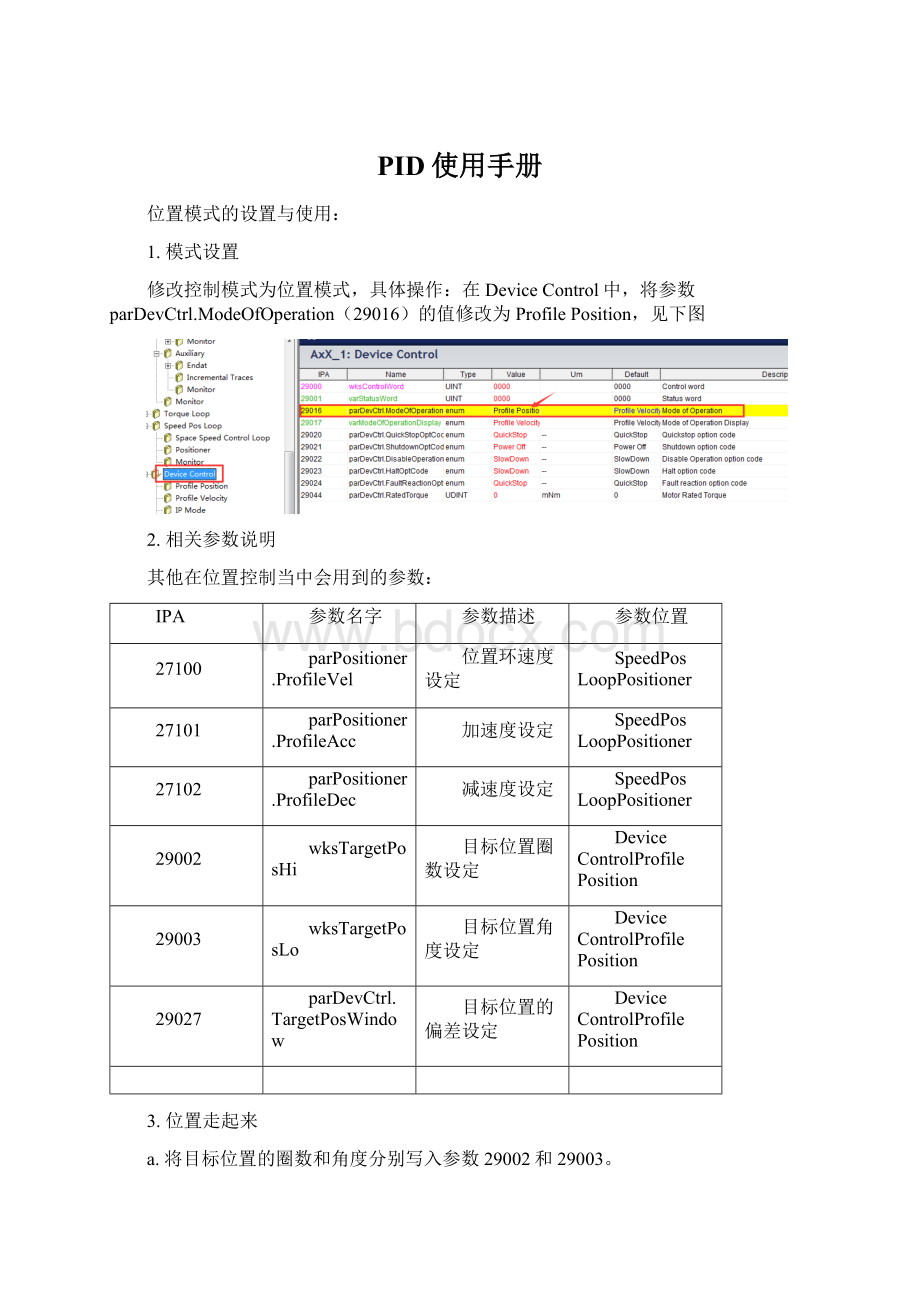
在DeviceControl中,将参数parDevCtrl.ModeOfOperation(29016)的值修改为ProfilePosition,见下图
2.相关参数说明
其他在位置控制当中会用到的参数:
IPA
参数名字
参数描述
参数位置
27100
parPositioner.ProfileVel
位置环速度设定
SpeedPosLoopPositioner
27101
parPositioner.ProfileAcc
加速度设定
SpeedPosLoopPositioner
27102
parPositioner.ProfileDec
减速度设定
SpeedPosLoopPositioner
29002
wksTargetPosHi
目标位置圈数设定
DeviceControlProfilePosition
29003
wksTargetPosLo
目标位置角度设定
DeviceControlProfilePosition
29027
parDevCtrl.TargetPosWindow
目标位置的偏差设定
DeviceControlProfilePosition
3.位置走起来
a.将目标位置的圈数和角度分别写入参数29002和29003。
b.控制字(29000)写入16#001F,电机就会转到设定的目标位置。
关于目标位置,这里要做一下说明。
根据控制字不一样,驱动器走动的位置也不一样,当驱动器写入16#001F,则电机会走到绝对位置,也就是说目标位置圈数=反馈位置圈数(27020)+位置补偿圈数(27022),目标位置角度=反馈位置角度(27021)+位置补偿角度(27023)。
例如:
当前反馈位置为0圈0度(初始化状态),位置补偿为(1圈60度),若需要电机走180度,则需写入目标位置为1圈(29002)240度(29003)。
当驱动器写入5F,则电机会走相对位置。
也就是说,目标位置写多少,就走多少。
例如:
当前反馈位置为0圈0度(初始化状态),位置补偿为(1圈60度),若需要电机走180度,则需写入目标位置为0圈(29002)180度(29003),与位置补偿无关。
每次位置走完之后,需要把控制字如下位置0,重新置1后,才会走下一个位置。
(也就是说1FF,5F4F)
位置插补模式
1.模式设置
修改控制模式为位置插补模式,具体操作:
在DeviceControl中,将参数parDevCtrl.ModeOfOperation(29016)的值修改为InterpolatedPosition,见下图
2.相关参数说明
位置插补模式的相关参数入下:
IPA
参数名字
参数描述
参数位置
29010
varIPQuotaMonitor
接收到的插补位置数据
DeviceControlIPMode
29033
parDevCtrl.IPTimeUnits
插补数据周期
DeviceControlIPMode
29034
parDevCtrl.IPTimeIndex
插补周期的位
DeviceControlIPMode
插补时间需要29033和29034结合起来确定,例如29034驱动器默认为-3,29033为1,则代表1*10-3S接收一次位置信息。
3.插补用法
在把驱动器运行模式设置为位置插补模式后,把驱动器正常使能,即可按照设定的周期把上位机计算得到的位置数据传送到驱动器,实现插补模式的控制。
这样可以使曲线更加圆滑,且加速曲线可由上位机自由设定。
回零模式的使用与设置
1.模式设置
修改控制模式为回零模式,具体操作:
在DeviceControl中,将参数parDevCtrl.ModeOfOperation(29016)的值修改为Homing,见下图:
2.参数说明
IPA
参数名
参数描述
参数位置
29035
parDevCtrl.HMMethod
回零方式
DeviceControlHoming
29036
parDevCtrl.HMPositiveSwitchSrc
正方向开关源
DeviceControlHoming
29037
parDevCtrl.HMNegtiveSwitchSrc
反方向开关源
DeviceControlHoming
29038
parDevCtrl.HMHomeSwitchSrc
回零开关源
DeviceControlHoming
29039
parDevCtrl.HMSpeedSwitch
找寻开关源的速度
DeviceControlHoming
29040
parDevCtrl.HMSpeedZero
回零速度
DeviceControlHoming
29041
parDevCtrl.HMSpeedAcc
回零加速度
DeviceControlHoming
29042
parDevCtrl.HomeOffsetHi
零点圈数偏置
DeviceControlHoming
29043
parDevCtrl.HomeOffsetLo
零点角度偏置
DeviceControlHoming
根据需要,可通过参数29035来修改归零的运动方式,具体见下节。
29036和29037是零点位置的开关量,可根据实际接线设置数字量输入端口。
在找寻零点的过程中,电机会按照29039的速度运行,当接触到零点开关源,电机以29040设定的速度回走到零点开关源位置。
29041是回零加速度设定。
29042和29043为编码器绝对位置的偏置角度,见下图所示:
3.回零模式用法
根据设定参数parDevCtrl.HMMethod的值,回零方法会有不一样,以下根据设定值分别描述。
(设定正反向是向左,反方向向右,开关激活为低电平)
A.1:
根据反方向开关和脉冲来回零
使用这个方法,电机反方向运行,当反方向限制开关激活且有脉冲的时候,电机超正方向运行,直到接收到反方向限制开关不激活后的第一个索引脉冲,电机停止。
B.2:
根据正方向开关和脉冲来回零
使用这个方法,电机正方向运行,当正方向限制开关激活且有脉冲的时候,电机朝反方向运行,直到接收到正方向限制开关不激活后的第一个索引脉冲,电机停止。
C.3,4:
根据高电平回零开关和索引脉冲来回零
由图可知,使用3或者4的方式,电机初始运行方向是由回零开关源(parDevCtrl.HMHomeSwitchSrc)来决定的。
零点位置是回零开关源变化后收到的第一个索引脉冲。
在运行过程中如果初始零点位置已经被设定,则电机转速是会反向运行的。
D.5,6根据低电平回零开关和索引脉冲来回零
由图可知,使用5或者6的方式,电机初始运行方向是由回零开关源(parDevCtrl.HMHomeSwitchSrc)来决定的。
零点位置是回零开关源变化后收到的第一个索引脉冲。
在运行过程中如果初始零点位置已经被设定,则电机转速是会反向运行的。
E.19,20无索引脉冲回零
在这个模式下,零点是根据零点开关源来决定的。
其运行方式参见下图:
F.33,34根据索引脉冲回零
使用33或者34模式来决定电机初始运行方向,在遇到第一个索引脉冲的位置就是零点。
三.菲仕驱动器PID初步整定说明
需要整定的参数
在保证全电机参数表以及PLC都已经导入驱动器的前提下(具体PLC及参数导入见相关章节),我们可以通过修改以下参数进行速度环PID整定:
IPA
参数
参数描述
27016
ParSSCntrLp.fSpdKpRef
速度环比例P,调整速度响应,过大会震荡
27015
parSSCntrLp.fPosKp
速度环积分I
27018
parSSCntrLp.fAccKpRef
速度环微分D
参数的整定
在机械结构和电机不变的前提下,对同一款型号的注塑机,在导入参数后一般只需要做一些小的PID修改就可以使电机速度跟随达到预定值,具体参数整定小技巧如下。
电流震荡波形
图1:
黄色和蓝色为速度反馈和速度参考,绿色是电流参考,红色是电流反馈
如果采集到的电流波形如上图一样呈现有规律的震荡,说明此时的P(比例)值偏高,系统响应过快,一般情况下电机都会发出尖锐的异响。
电流震荡会引起速度的震荡,会对控制精度造成影响。
因此需要降低P来消除震荡。
修正方法是:
逐步,慢慢降低P(每次修改都要把P值写入驱动器,并保存,可以不复位),直到电机异响消除,然后再采集波形,确定电流和速度反馈无震荡,如下图所示:
图2:
黄色速度参考,蓝色速度反馈,绿色电流反馈,红色电流参考
注:
因为现在的参数都是调整过后的,所以若是在下载完参数并保存重启后,电机震荡(有尖锐异响),首先可以同比例降低PI(例如P=5,I=50,则可以改为P=2.5,I=25),直到电机不再有异响,然后采集波形看速度跟随效果及是否还有震荡。
超调
图3:
黄色为速度参考,蓝色为速度反馈,绿色是电流参考,红色是电流反馈
从图3可以看到,当实际速度(蓝色)加速到设定值(黄色,速度参考)的时候它不会立即稳定,会超过设定值,然后再回调到设定值,最后稳定。
实际速度超过设定值就是超调。
超调可能会使螺杆走位不精准,而且在降速的时候如果出现大的超调,会有较大的机械噪音。
加速阶段的超调不会对位置造成很大影响,因为后期可以通过上位机的位置控制来调整,所以我们的目的是尽量减少减速时候的超调。
下面以加速时候的超调为例来整定。
由图可知,在加速过程中,参考和反馈并没有重合,所以它会产生误差的累加,如果增加P值可以加快响应,减少加速过程中的误差,因此可以在电机不震荡的前提下加一些P,慢慢往上加(每次修改都要把P值写入驱动器,并保存,可以不复位),每次修改P之后都采集波形看一下效果。
若超调比参数修改前更大,则减小P,也可尝试将积分I减小。
建议每次只动一个参数,然后依据波形进行下一步的整定。
整定效果如下图所示:
图4:
黄色为速度参考,蓝色为速度反馈
速度回复慢
图5:
黄色为速度参考,蓝色为速度反馈
如图5所示,这里速度也发生了超调,但是和图3相比较,我们会发现它达到设定速度的时间要慢,这样有可能使螺杆走位不精准。
我们可以适当增加积分I,使其快速达到设定值,也就是达到图3所示的效果,然后再来解决超调过大的问题。
速度震荡
图6:
黄色为速度参考,蓝色为速度反馈,绿色是电流参考,红色是电流反馈
如图6所示,速度反馈成波浪状在速度参考附近抖动,最后达到需求速度,这种状态也是速度震荡的一种。
速度产生这种震荡是因为比例P不够大,系统响应偏慢造成的(有时候微分效果也会造成类似的波形),在系统不震荡的前提下适当的增加比例可以消除速度震荡。
效果如下图所示,你可以做的更好:
提前响应速度参考
适当的增加微分D参数可以使系统提前响应速度参考,但是也容易会使速度产生震荡,甚至可能出现一些不可预料的结果。
因此不建议客户自己修改,这里就不再多做阐述。
 升级会员
升级会员 