立体测图作业流程总结.docx
《立体测图作业流程总结.docx》由会员分享,可在线阅读,更多相关《立体测图作业流程总结.docx(16页珍藏版)》请在冰豆网上搜索。
立体测图作业流程总结
立体测图工作步骤
一、准备数据原始照片
Pos数据
像控点坐标
相机检校文件
二、利用pix4d进行空三加密
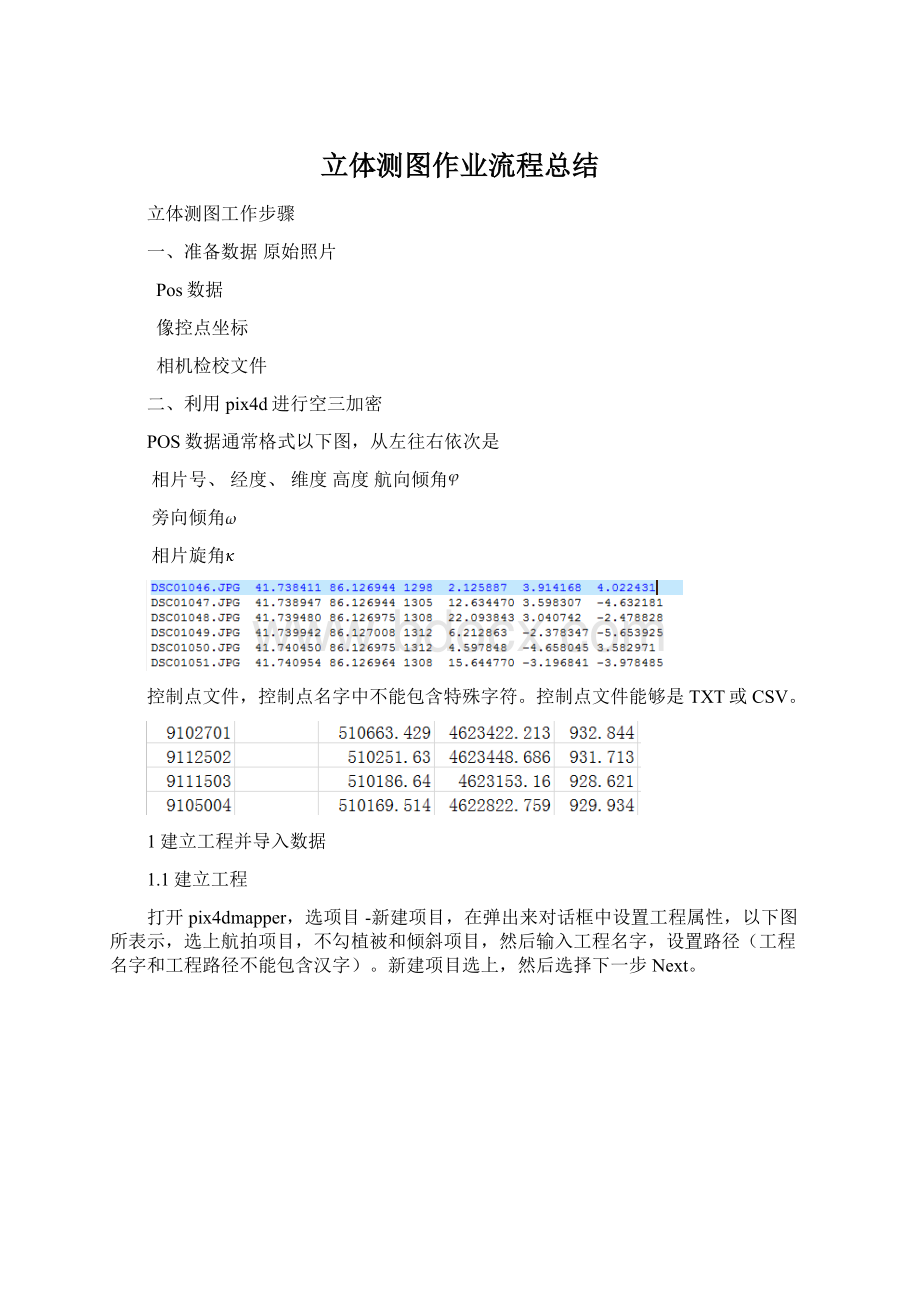
POS数据通常格式以下图,从左往右依次是
相片号、经度、维度高度航向倾角
旁向倾角
相片旋角
控制点文件,控制点名字中不能包含特殊字符。
控制点文件能够是TXT或CSV。
1建立工程并导入数据
1.1建立工程
打开pix4dmapper,选项目-新建项目,在弹出来对话框中设置工程属性,以下图所表示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字和工程路径不能包含汉字)。
新建项目选上,然后选择下一步Next。
2.1加入影像
点添加图像,选择加入影像。
影像路径能够不在工程文件夹中,路径中不要包含汉字。
点Next。
3.1.设置影像属性
✓图像坐标系
设置POS数据坐标系,默认是WGS84(经纬度)坐标。
✓地理定位和方向
设置POS数据文件,点从文件选择POS文件。
✓相机型号
设置相机文件。
通常软件能够自动识别影像相机模型。
确定各项设置后,点Next进入下一步。
然后点击Finish完成工程建立。
2快速处理检验
这一步能够不做,只是起到一个检验作用。
快速处理出来结果精度比较低,所以快速处理速度会快很多。
所以快速处理提议在飞行现场进行,发觉问题方便立即处理。
假如快速处理失败了,那么后续操作也可能出现相同结果。
点运行,选择当地处理。
设置以下图,初步处理和快速检测选上,其它不选,点开始,等候软件运行完,能够查看快速处理得到结果(一张影像拼图),检验快速处理质量汇报。
质量汇报关键检验两个问题,Dataset和Cameraoptimizationquality。
Dataset(数据集):
在快速处理过程中全部影像全部会进行匹配,这里我们需要确定大部分或全部影像全部进行了匹配。
假如没有就表明飞行时相片间重合度不够或相片质量太差。
Cameraoptimizationquality(相机参数优化质量):
最初相机焦距和计算得到相机焦距相差不能超出5%,不然就是最初选择相机模型有误,重新设置。
3加入控制点
控制点必需在测区范围内合理分布,通常在测区四面和中间全部要有控制点。
要完成模型重建最少要有3个控制点。
通常100张相片6个控制点左右,更多控制点对精度也不会有显著提升(在高程改变大地方更多控制点能够提升高程精度)。
控制点不要做在太靠近测区边缘位置,控制点最好能够在5张影像上能同时找到(最少要两张)。
3.1使用像控点编辑器加入控制点
3.1.1加入控制点文件
点项目,选择像控点编辑器。
出现以下对话框。
点击增加像控点后,图像会出现在对话框中,能够逐一刺出控制点。
选择导入像控点。
在出来对话框中设置像控点坐标系、导入像控点文件(csv格式)。
3.1.2在图像上刺出控制点
在左侧图像列表中选中图像,右侧就会显示出该图像。
在对应位置上,鼠标左键击图像中点,标出控制点位置。
一个控制点最少要在两张图像上标出来,通常提议标注在3-8张图像上。
在质量汇报中会显示是否需要在更多图像上标出控制点。
设置完成后,点OK。
控制点就加入到了工程里面。
4全自动处理
点击菜单栏运行,选择当地处理,系统出现以下对话框。
4.1初始化设置
a.特征匹配
设置处理单位像素大小,越大效果越好,花时间也越多。
越小耗时越小。
b.优化
步骤包含了数次空中三角测量、光束法局域网平差和相机自检校计算。
Internalcameraparameters、Externalcameraparameters内部参数和外部参数(能够分别了解为内方位元素和外方位元素)。
✓Optimizeexternalandallinternals通常无人机震动比较大,所以提议选这个,两个全部进行优化计算。
✓Optimizeexternalonly仅优化外部参数,假如使用相机已经进行严格检校,而且相机参数一定要被使用,我们就会选这个选项。
✓Optimizeexternalsandleadinginternals优化外部参数和关键内部参数。
对于视角相机模型关键内部参数包含相机焦距和两个径向畸变参数,对于鱼眼镜头模型是指相机参数多项式系数。
c.输出
✓Camerainternalsandexternals,AAT,BBA
生成相机内部参数和外部参数、空三文件、区域网光束平差文件。
✓未畸变影像
畸变纠正影像。
(假如提供了相机参数,在processing-saveundistortedimages中能够生成畸变纠正影像)
5质量汇报分析
关键关注区域网空三误差、自检校相机误差、控制点误差。
7.1区域网空三误差
区域网空三误差以下图,Meanreprojectionerror就是空三中误差,以像素为单位。
相机传感器上像素大小通常为6微米(μm),不一样相机可能不一样。
换算成物理长度单位就是0.166577*6μm。
7.2相机自检校误差
上下两个参数不能相差太大(比如Focallength上面33.838mm,下面是20mm,那么肯定是初始相机参数设置有问题),R1、R2、R3三个参数不能大于1,不然可能出现严重扭曲现象。
7.3控制点误差
ErrorX、ErrorY、ErrorZ为三个方向误差。
三、PIX4D空三结果导入MapMatrix软件
利用pix4d第一步处理pos数据和相机参数进行立体测图
空三处理后相机参数
空三处理后POS文件
打开MapMatrix软件,
1、新建工程:
选择新建工程按钮
,在弹出窗口中选择对应工程文件夹,或在指定路径下选择“新建文件夹”按钮新建一个文件夹用以存放工程数据,工程名称将和文件夹名一致(注意:
若已经有工程名称和该文件夹名相同,系统建立工程名会自动在工程名后面加上部分随机数字生成一个新工程名以示区分)
2、新建航带:
新建假如测区中有多条航带,选择“影像”节点,点击鼠标右键,在弹出右键菜单中选择“新建航带”菜单项,可新建航带;
添加影像:
在“strip_0”节点点击鼠标右键,在弹出右键菜单中选择“添加影像”菜单项,加载*.tif影像。
添加完成后参考测区原始影像结合图,根据由左至右(航带内)、由上而下(航带间)排列。
注意:
航带依据pos文件kappa角确定
奇数航带序号从小到大排列
偶数航带序号从大到小排列
3、修改扫描分辨率(像元大小),新建相机文件
焦距和扫描分辨率大小来自于mission_internalsj.cam文件
扫描分辨率=6.169/4608=4.62750/3456=0.001339,扫描分辨率修改需要在选中影像节点时,即确保全部影像全部修改过来了。
畸变参数和主点偏移参数输入:
相机参数输入完成后,以下图:
注意:
焦距位数不要过长
K1对应K3
K2对应K5
K3对应K7
影像节点右键,数码量测相机内定向。
4、编辑外方位元素文件,导入外方位元素
1)外方位元素来自于pos文件,开头文件去掉,修改为MapMatrix能识别格式。
2)选择影像节点,在右键菜单中选择编辑外方位元素菜单,即进入外方位元素编辑界面。
选择打开文件图标
,设置需要打开文件格式,本数据转角格式为默认角度-360。
选择需要打开外方位元素文件,选择一栏特征文件,选择“开始”,在编辑框中,一一指定相关参数。
注意:
转角系统是OmegaPhiKappa
在参数根据“XYZOmegaPhiKappa”次序指定后,将转角系统修改为“OmegaPhiKappa”
3)确定后,开始关联原始影像
可自动关联也可手动指定关联。
关联完成后,即完成外方位元素导入。
在编辑外方位元素窗口中显示以下:
5.创建立体相对,新建DLG,实时核线测图
工程节点右键,创建立体相对,即可对全区影像创建立体相对。
DLG节点右键,新建DLG,
新建DLG右键,加入立体像对
新建DLG右键,数字化
进入feature软件进行立体测图
心得体会
精度分析:
1.空三精度影响整个结果精度。
因为无人机飞行姿态较差,
相机畸变较大,直接影响了空三加密精度,使用单一
空三加密软件,极难使空三精度确保在误差范围内,所
以要使用多个空三软件结合处理方法进行,才能满足空三加密精度要求。
空三精度满足条件是立体像正确上下视差为0,上下视差过大,空三精度不够,要重新进行空三加密。
2.立体模型数据采集精度受约于人工作业,直接影响数字线划图精度,对立体采集人员技术能力要求比较高,要达成立体采集数据能力,必需对立体采集人员进行培训,只有对立体采集熟练以后,才能满足数字线划图精度要求。
立测优势:
立体测图熟练以后,高程精度能达成20-30公分,最高能满足1:
1000测图要求。
估计每人天天成图在0.5平方公里以上,大大提升了成图速度,降低了外业工作量,工程周期缩短,现在被广大测绘单位所采取,逐步替换了传统人工外业测图模式。
工作模式:
因为早期立体采集熟练程度不够,且立体采集对建筑物多地方,成图速度较慢,不如用正射影像进行成图速度。
所以估计工作模式是用正射影像图描绘建筑物,道路等线状面状地物;用立测软件采集高程点,描绘等高线。
这么才能在确保精度前提下,提升工作效率。
 升级会员
升级会员 