曲柄滑块在PROE中仿真.docx
《曲柄滑块在PROE中仿真.docx》由会员分享,可在线阅读,更多相关《曲柄滑块在PROE中仿真.docx(12页珍藏版)》请在冰豆网上搜索。
曲柄滑块在PROE中仿真
曲柄滑块在PRO/E中的仿真
一、建立曲柄滑块机构所需构件
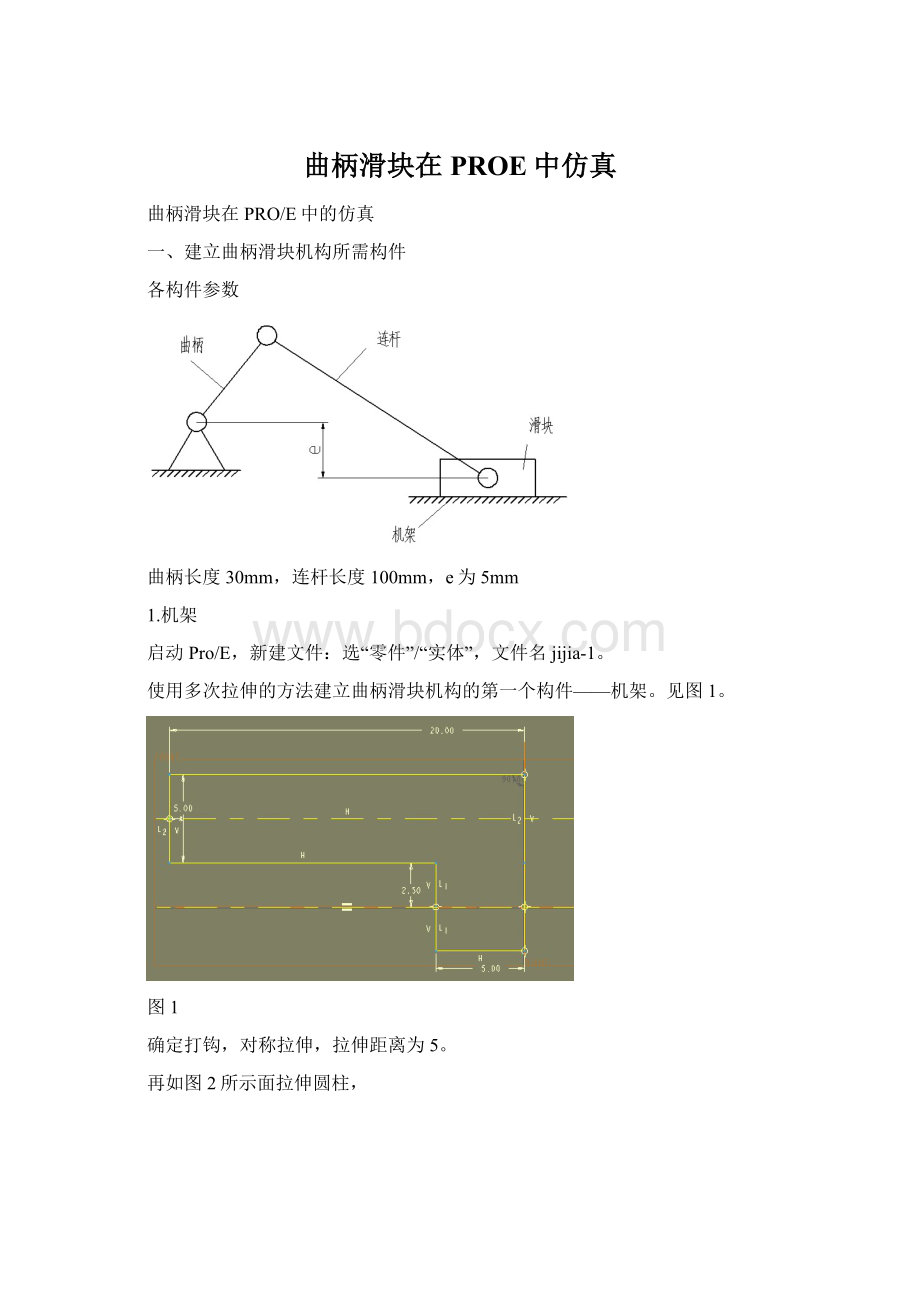
各构件参数
曲柄长度30mm,连杆长度100mm,e为5mm
1.机架
启动Pro/E,新建文件:
选“零件”/“实体”,文件名jijia-1。
使用多次拉伸的方法建立曲柄滑块机构的第一个构件——机架。
见图1。
图1
确定打钩,对称拉伸,拉伸距离为5。
再如图2所示面拉伸圆柱,
图2
圆直径为5,拉伸距离为140。
然后照图3所示拉出两圆柱凸台,大圆柱凸台与方形三边相切,即保证偏心距e=5,小圆柱凸台直径3,长度3。
画完见图4。
图3
图4
2、曲柄
画曲柄,新建零件,名称为qubing-1,如图5拉伸草绘
图5
拉伸距离为3,画完如图6
图6
3连杆
画连杆,新建零件,名称liangan-1.如图7拉伸草绘,只在一边画圆拉伸孔。
图7
再在另一边拉伸凸台,如图8所示,凸台与R2.5同心,高度3。
图8
4滑块
最后画滑块,文件名huakuai-1,如图9拉伸。
图9
对称拉伸,拉伸长度为10。
然后在图10所示平面拉伸一圆柱,直径3,长度10。
图10
二、装配
1.新建名称为zhuangpei的组件,如图11所示。
图11
2、插入机架
位置缺省,然后插入曲柄,约束类型选销钉如图12所示
图12
装配完如图13
图13
3、插入连杆
同样选销钉,如图14把凸台插入曲柄孔中
图14
4、插入滑块
首先选销钉,把滑块凸台插入连杆孔中,销钉的平移不能选重合,选偏距,距离计算好后再输入,要使滑块孔轴线与机架圆柱轴线在同一基准平面内,如图15
图15
然后选放置里面的新设置,如图16
图16
注意这里集类型选圆柱,如图17
图17
然后选择滑块孔和机架轴。
装配完毕如图18所示
图18
三、运动仿真
1、选择应用程序下面的机构,如图19
图19
进入机构运动仿真环境,窗口左侧出现运动仿真特征树,右侧显示运动分析工具栏。
2、设置主动件。
单击工具按钮“伺服电机”,在弹出的窗口中,选择曲柄与机架的铰接轴作为运动轴,即指定曲柄为主动件,来产生回转运动。
如图20,21
图20
图21
然后点轮廓,把位置改为速度,A处输入10,意思为10度/秒,确定。
如图22
图22
3、点机构分析,出现如图23所示对话框
图23
位置改为运动学,终止时间为72.即曲柄运动两圈,点运行,机构开始运动。
4、单击工具按钮“回放”,用播放控制按钮对运动仿真进行回放。
单击“捕获”,在弹出的窗口中,可以将动画输出为.mpeg和.avi视频等格式。
如图24
图24
四、生成滑块速度与时间关系的运动分析图
1、单击工具按钮“生成分析”,弹出如图25所示对话框
图25
在弹出的对话框单击新建按钮,
弹出“测量定义”对话框,如图26所示
图26
位置改为速度,选择滑块移动的运动学移动轴,点确定,在弹出的对话框中把分别绘制测量图形打钩,如图27
图27
2、在结果集选择一结果,点绘制图形,即得到滑块的速度图,如图28
图28
 升级会员
升级会员 