盾构区间测量方案.docx
《盾构区间测量方案.docx》由会员分享,可在线阅读,更多相关《盾构区间测量方案.docx(26页珍藏版)》请在冰豆网上搜索。
盾构区间测量方案
一、编制依据
1、《城市轨道交通工程测量规范》GB50308-2008
2、《全球定位系统城市测量技术规程》CJJ73-2009
3、《工程测量规范》GB50026-2007
4、《城市测量规范》CJJ8-99
5、《新建铁路工程测量技术规范》(TB10101-99)
6、《地下铁道工程施工及验收规范》(GB50299-1999)
7、《地下铁道设计规范》(GB50299-1999)
8、《国家一、二等水准测量规范》(GB12897-91)
9、经批准的《XX市轨道交通1、2号线工程控制网测量技术方案》
10、XX轨道交通2号线线路设计相关图纸文件
11、XX轨道交通2号线控制测量工程控制点成果表
12、甲方的有关技术要求
二、工程概况
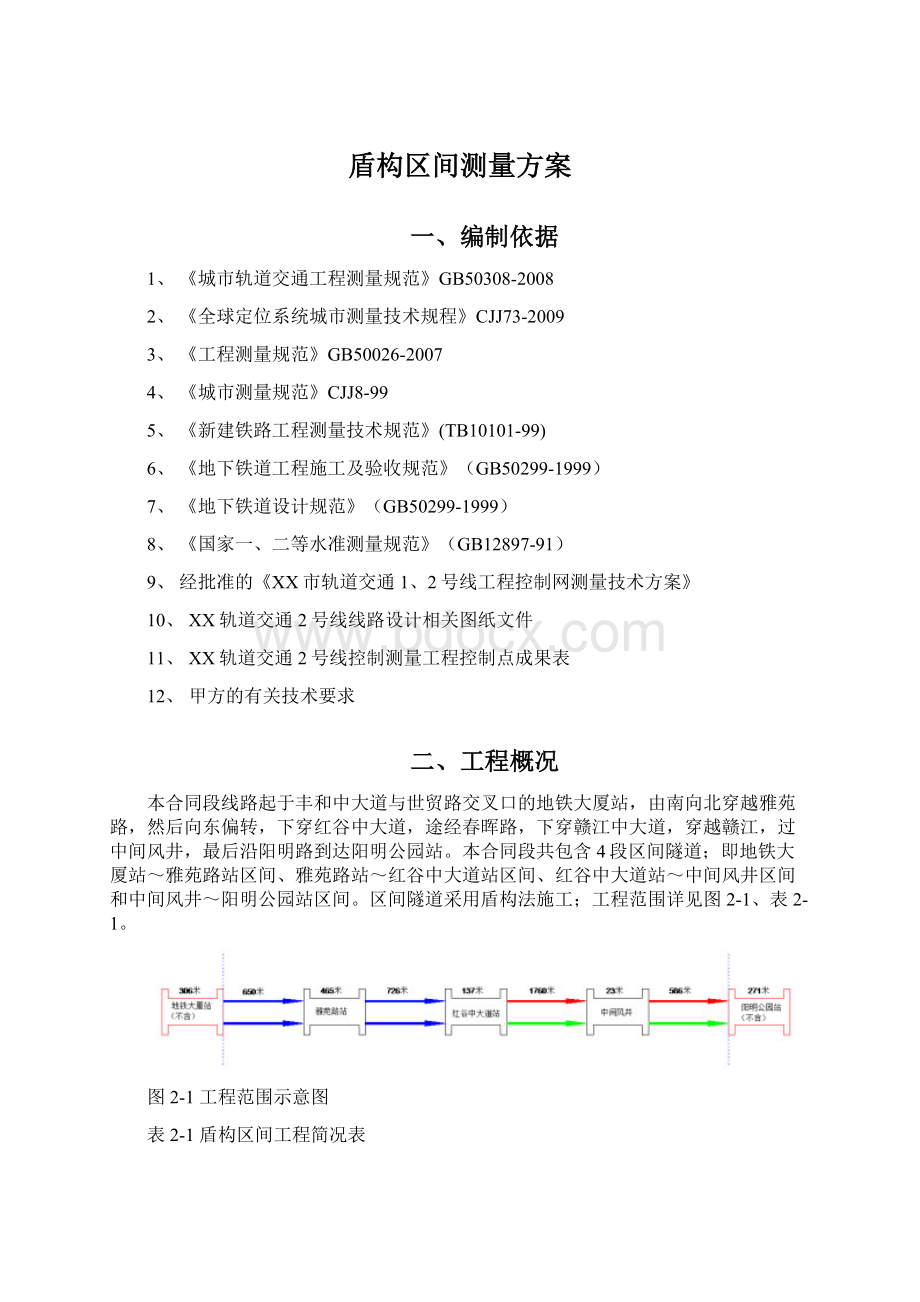
本合同段线路起于丰和中大道与世贸路交叉口的地铁大厦站,由南向北穿越雅苑路,然后向东偏转,下穿红谷中大道,途经春晖路,下穿赣江中大道,穿越赣江,过中间风井,最后沿阳明路到达阳明公园站。
本合同段共包含4段区间隧道;即地铁大厦站~雅苑路站区间、雅苑路站~红谷中大道站区间、红谷中大道站~中间风井区间和中间风井~阳明公园站区间。
区间隧道采用盾构法施工;工程范围详见图2-1、表2-1。
图2-1工程范围示意图
表2-1盾构区间工程简况表
区间名
建筑形态
施工方法
长度
(m)
备注
地铁大厦站~雅苑路站
单洞单线
盾构法
655
雅苑路站~红谷中大道站
单洞单线
盾构法
726
红谷中大道站~中间风井
单洞单线
盾构法
1703
中间风井~阳明公园站
单洞单线
盾构法
531
2.1地铁大厦站~雅苑路站区间
地铁大厦站~雅苑路站区间全长655米,线路平面呈“S”形延伸;隧道最深埋深约21米。
其中含两条平曲线、两条竖曲线;平曲线最小曲线半径R=400m,竖曲线最大坡度+5.1‰。
隧道为单圆盾构区间隧道以及联络通道、泵站等附属结构,采用土压平衡盾构法施工。
盾构导向系统采用英国ZED极光导向系统。
区间隧道线路如图2-2所示。
图2-2:
地铁大厦站~雅苑路站区间平面示意图
2.2雅苑路站~红谷中大道站区间
雅苑路站~红谷中大道站区间全长726米,线路平面呈“C”字形延伸;隧道最深埋深约22米。
其中含一条平曲线、两条竖曲线;平曲线最小曲线半径R=400m,曲线长度约602米;竖曲线最大坡度-8.3‰。
隧道为单圆盾构区间隧道以及联络通道、泵站等附属结构,隧道施工和地~雅区间采用同一台土压平衡盾构机施工。
区间隧道线路如图2-3所示。
图2-3:
雅苑路站~红谷中大道站区间平面示意图
2.3红谷中大道站~中间风井区间
红谷中大道站~中间风井区间全长1703米,隧道穿越赣江,过江段最浅覆土7.9米,最深埋深约26米。
其中含两条平曲线、五条竖曲线;平曲线最小曲线半径R=600m,竖曲线最大坡度-25‰。
隧道为单圆盾构区间隧道以及联络通道、泵站等附属结构,隧道施工采用两台泥水平衡盾构机施工。
区间隧道线路如图2-4所示。
图2-4:
红谷中大道站~中间风井区间平面示意图
2.4中间风井~阳明公园站区间
中间风井~阳明公园站区间全长531米,隧道穿越八一大桥南引桥桥桩群,线路曲线较多,地形复杂。
线路左线含三条平曲线、两条竖曲线;线路右线含两条平曲线、两条竖曲线。
平曲线最小曲线半径R=650m,最短夹直线长度36.265米;竖曲线最大坡度+24.2‰。
隧道为单圆盾构区间隧道以及联络通道、泵站等附属结构,隧道施工采用两台泥水平衡盾构机施工。
区间隧道线路如图2-5所示。
图2-5:
中间风井~阳明公园站区间平面示意图
本标段4区间具体情况见下表:
表2-2:
区间隧道详表
区间
线别
起讫里程/m
隧道长度/
延米
联络通道(泵
房)/座
联络通道/座
地铁大厦站~雅苑路站区间
左线
ZDK31+587.523~ZDK32+242.763长链6.309m
661.549
右线
YDK31+587.523~YDK32+242.763
655.24
雅苑路站~红谷中大道站区间
左线
ZDK32+705.694~ZDK33+422.286
716.592
1
1
右线
YDK32+701.608~YDK33+422.286
720.678
红谷中大道站~中间风井
左线
ZDK33+566.186~ZDK35+276.360短链15.107m
1695.067
1
1
右线
YDK33+566.186~YDK35+276.360
1710.174
区间
线别
起讫里程/m
隧道长度/
延米
联络通道(泵
房)/座
联络通道/座
中间风井~阳公园站
左线
ZDK35+289.160~ZDK35+925.021
635.861
1
三、施工测量技术要求
1.施工测量按招标文件和设计图纸、《城市轨道交通工程测量规范》GB50308-2008、《工程测量规范》GB50026-2007、《城市测量规范》CJJ8-99及《盾构法隧道施工与验收规范》(GB50446-2008)的有关规定执行。
2.对建设管理方提供的控制点(GPS网及精密导线网)进行复测,符合精度要求后方可作为工程施工测量的依据。
3.对整个工程施工区内按施工需要布设精密导线平面控制网,并应采用精密导线测量的技术要求施测,测角中误差为2.5〞测距相对中误差为洞外1/60000,洞内1/60000。
4、施工区内按施工需要布设高程控制网,并应采用四等水准测量的技术要求施测,测量结果满足高程闭合差应为±8
mm(L为线路长度,以km计),每千米高差中误差的偶然中误差为±2mm。
5.隧道开挖贯通测量中误差规定为:
横向±50mm、竖向±25mm,极限误差为中误差的2倍。
四、施工测量仪器管理及组织机构管理
4.1测量仪器的管理
(1)项目经理部对测量仪器严格管理,实行专人使用专人负责制,建立保管、使用、维修制度。
每次测量开始、结束时,指定专人对所使用测量仪器进行清点、整理,擦拭污浊物。
(2)各种测量仪器、量具按计量部门有关规定定期进行检定,做好日常保养工作,保证状态良好,建立测量设备台帐,准确记载检定维修情况。
(3)使用仪器设备如下表:
表4-1:
盾构工区仪器设备一览表
仪器设备名称
仪器等级
数量
仪器状态
标定情况
备注
莱卡全站仪
2秒
1套
良好
已标定
苏光水准仪
DSZ2
1套
良好
已标定
塔尺
0.1mm
2把
良好
已标定
铟钢尺
1对
良好
已标定
(4)测量仪器鉴定证明
凡涉及本工程均需使用的测量仪器鉴定书见附表。
4.2测量组织机构管理
4.2.1施工测量的组织管理机构
我项目经理部成立由项目总工为总指挥、测量工程师为组长的施工测量组。
测量组成员如下:
表4-2:
盾构工区测量人员配置一览表
序号
姓名
学历
职称
职务
备注
1
XXX
专科
工程师
测量主管
2
XXX
专科
测量员
组长
3
XXX
专科
测量员
组员
4
XX
专科
测量员
组员
测量过程由测量主管总体负责,组长工点负责,组员认真配合。
4.2.2施工测量的管理
(1)现场监理工程师对日常测量工作进行监督和复测。
测量监理负责提供工程范围内有关三角网点、水准网点及中级控制桩点等基本数据。
我们进行复核验算,放样后报监理工程师复测确认,并提前7天向监理部报送施工测量报审表。
工程范围内全部三角网点、水准网点和自己布设的控制点由我们负责保护。
(2)成立由专职测量工程师为组长的精测组和施工测量组。
(3)执行分级测量复核制度。
①精测组负责标段内全部土建工程的控制测量、分阶段性控制和复核检查工作。
负责复核和指导施工测量组完成施工测量任务;负责向施工测量组现场交点、交桩、交测量资料和成果;负责控制护桩的测量。
②施工测量组,负责作业区的日常施工测量、施工放样及控制桩点的埋设及防护。
(4)控制测量和施工测量的测量精度符合国家或省、部颁发有关《测规》的标准和要求。
(5)测量原始记录、资料、计算、图表必须真实完整,不得涂改,并由专人妥善保管。
(6)工程施工中,按设计图纸进行中线、高程测量,确保中线、水平准确无误;工程完工后,及时与相邻标段进行贯通测量,顺接闭合。
(7)认真贯彻执行测量复核制度,外业测量资料必须经过第二人复核,内业测量成果必须二人独立计算,相互核对才能交付使用,未经第二人计算复核并确认无误的资料严禁使用。
五、地面控制测量
地面控制测量的主要目的是建立的测量控制系统,提供可靠的平面和高程控制点。
工程地面控制网包括平面控制网、高程控制网,其中平面控制包括GPS网、精密导线网,系统采用XX轨道交通坐标系统,高程控制网采用1956年黄海高程系统。
控制网由“XX地铁二号线测量中心”提供,施工过程中按要求进行复核测量。
5.1平面控制网
考虑到工程作业区位于XX市新区繁华市区,导线选点及观测难度非常大,精密导线测量作为GPS控制网施工作业中的补充测量方式。
精密导线测量采用LeicaTCA2003型0.5秒全站仪进行导线施测,测距标称精度1mm+1ppm;水平角观测采用方向观测法,每测站观测4测回,个别短边观测6测回,测角中误差为±2.5″。
复测结果进行严密平差,精度达到精密导线的技术要求。
5.2精密水准网
精密水准控制测量采用苏一光精密光学水准仪器,2米铟瓦水准尺,每公里往返高差中数误差为±0.3mm,往返较差、附合闭合差应≤±8
mm。
六、联系测量
隧道施工初期隧道联系测量通过车站盾构始发竖井采用竖井联系测量指导盾构掘进,并根据各车站具体施工情况可采用两井定向方法进行对控制点坐标约束控制,克服一井竖井定向精度较低的缺点。
6.1地铁大厦站始发井联系测量
6.1.1地面趋近导线测量
由于地铁大厦站南北两个端头井分别为3标和我标段的盾构始发井,且车站主体已经施工完毕;故考虑联系测量主要采用两井定向法进行导线传递。
首先在地铁大厦站端头盾构始发竖井(北端头井)旁布设2个地面导线点,与地面控制桩点形成附合导线施测,且布设的导线点必须保证至少和附近两个地面控制桩点通视;同时该导线与3标始发井导线点链接,保证线路的连续性。
具体点位如图6-1所示。
图6-1:
地铁大厦站盾构始发井地面控制网
6.1.2竖井联系测量
两井定向测量采用“吊锤线与全站仪联合定向法”定向施测。
外业作业如图6-2所示,两竖井中分别悬挂一根锤线,锤线采用0.4mm钢丝,下端悬挂10Kg圆柱形重锤至油桶中,以保证锤线稳定竖直;钢丝上下端粘贴莱卡标配反射片以供观测。
观测采用全站仪在地面近井点Ⅱ4DM2和“3标近井点”精确测定O1、O2锤线点坐标。
在井下站台层将已布设的导线点与竖井吊锤线连测,通过站台层构成一个没有连接角的无定向导线。
对此进行数据处理,求得地下定向边的方位角和定向点的坐标。
图6-2:
地铁大厦站竖井定向测量(两井定向)
6.2雅苑路站接收井及始发井联系测量
6.2.1地面趋近导线测量
雅苑路站南端头井为“地铁大厦站~雅苑路站”区间盾构接收竖井,北端头井为“雅苑路站~红谷中大道站”区间始发井。
该站内精密导线点有Y3、Y2、Y1、JMⅡ404、JMⅡ405两对控制点。
考虑到方便进行联系测量,在南端头井加设地面近井点Ⅱ4DM3,在北端头井加设Ⅱ4DM4、Ⅱ4DM5两个地面近井点,与地面控制点形成附合、闭合导线施测,且布设的导线点必须保证至少和附近两个地面控制桩点通视;具体点位如图6-3所示。
图6-3:
雅苑路站盾构始发及接收井地面控制网
6.2.2竖井联系测量
由于雅苑路站首先施工车站南段,且南端头井为盾构接收井,故考虑到在隧道贯通前,该段车站已经施工完毕,因此为保证测量精度及施测方便,该竖井联系测量采用两井定向法施测;具体方法同地铁大厦站联系测量施测方法。
由于雅苑路站北段受管线迁改影响,施工进度较慢;“雅~红”区间盾构始发前该始发井可能不具备两井定向测量条件,故该始发井拟采用“一井定向”进行导线传递。
后期车站具备进行两井定向测量条件时,及时进行两井定向测量进行对原定向边进行约束控制。
联系三角形定向是用三根钢丝来传递坐标和方位的,在具体实施时悬挂三根钢丝,在平面上钢丝绳与井上、井下的观测台组成两个直伸三角形。
侧面示意图如图6-4所示。
图6-4:
雅苑路站盾构始井联系三角形法略图
在布设时使三角形长短边之比值应至少大于1.5倍,同时
点也不宜离仪器过近。
三角形中锐角应小于1°,同时,钢丝末端悬挂10Kg垂球,为防止钢丝晃动影响观测,将垂球浸在盛满油的油桶内,并且垂球不得与油桶接触。
测量要求:
(1)每次定向独立测量三次,取三次平均值为定向成果;
(2)角度观测应采用不低于Ⅱ级全站仪,用方向观测法测6测回,测角中误差≤2.5’’;
(3)联系三角形测量采用光电测距,并用钢尺复核,每次独立测量3测回,每测回3次读数,测回间距≤1mm;地下、地上钢丝间距较差≤2mm;
(4)联系三角形定向推算的地下起始边方位角的较差应≤12’’,点位较差≤20mm,方位角平均值中误差为±8’’。
每次几何定向的同时应该对于井下控制导线进行复核。
井下控制导线是作为施工首级控制,用来准确指导掘进方向的边长较长、精度较高的导线,每次几何定向配合同步进行井下导线复测,重新计算导线点,并将定向所得的方位传至隧道内最新设置的测量台,修正施工导线的偏差。
观测时仪器应采取强制对中,其测量规范采用与井上放样测量相同的规定。
6.3红谷中大道站接收井及始发井联系测量
6.3.1地面趋近导线测量
红谷中大道站西端头井为“雅苑路站~红谷中大道站”区间盾构接收竖井,东端头井为“红谷中大道站~中间风井”区间始发井。
该站内精密导线点有JMⅡ405、JMⅡ406、JMⅡ407三个控制点。
考虑到方便进行联系测量,在东端头井加设地面近井点Ⅱ4DM6,与地面控制点形成附合导线施测,且布设的导线点必须保证至少和附近两个地面控制桩点通视;具体点位如图6-5所示。
图6-5:
红谷中大道站盾构始发及接收井地面控制网
6.3.2竖井联系测量
由于红谷中大道站车站已经开始施工,该站两端区间盾构施工较晚;因此在盾构接收及始发时,车站已具备两井定向施测条件;故该站联系测量采用两井定向法施测。
具体施测方法及观测要求参照地铁大厦站“两井定向”采用的“吊锤线与全站仪联合定向法”。
6.4中间风井联系测量
6.4.1地面趋近导线测量
中间风井为地下五层结构,围护结构长23米、宽28.5米、基坑开挖深度28.34米;盾构在中间风井拟采用直接过站。
站内控制点有F4、F5,施工围挡外较近控制点有F2;进行联系测量时,在近井处加设近井点F6,与控制点F2、F4、F5构成闭合导线进行施测。
点位布设如图6-6所示。
图6-6:
中间风井盾构通过井地面控制网
6.4.2竖井联系测量
由于中间风井为盾构直接过站;在盾构贯通风井前该竖井内空间狭小(23m×28.5m),考虑采用一井定向联系测量在底板上导入控制点的控制边太短,且无法满足底板施工放样及盾构钢环安装放样测量。
因此拟采用在地连墙中部位置安装3个莱卡360º小棱镜,在近井点支导线一站直接测出三个棱镜坐标,测量精度要求同等精密导线精度要求;施工放样时首先对棱镜坐标进行检核,合格后在基坑底部自由设站后视三个已知点定向测量;如图6-7所示。
根据竖井深度及平面尺寸分析(详见下图6-8所示),该测量方法井上测量竖直角约25º,井下定向测量竖直角约26º;均小于30º,满足规范要求。
图6-7:
中间风井导线直接传递法示意图图6-8:
竖直角分析图
6.5地面趋近水准测量
依据地面二等水准点,在端头井边设置2个加密水准点,布设成附合路线。
主要技术要求与地面精密水准测量相同。
6.6高程传递
采用钢尺导入法将高程引入盾构井下。
具体方法如下:
①钢尺悬挂在支架上,尺的零端垂于井下,并在该端挂一10kg的重垂。
②井上安置一台水准仪读取已知水准点的水准尺读数和钢尺的读数,井下安置一台水准仪读取未知水准点的水准尺读数和钢尺的读数,计算得未知水准点的高程。
③为避免钢尺上下移动对测量结果的影响,井上、井下读取钢尺读数必须在同一时刻进行。
④变更仪器高,并将钢尺升高或降低,重新观测一次。
⑤测定的高程必须进行温度、尺长改正,两次高程较差小于l/8000mm(l为井上、井下水准仪视线间的钢尺长度)时取其平均值作为洞内高程传递的依据。
图6-9:
竖井高程传递
七、地下控制测量
地下控制测量主要包括地下控制导线测量及地下控制水准测量。
考虑到本项目工程过江区间盾构独头掘进长度超过2km,洞内要求测量方向控制精度很高,施工期间应要求处、工区测量队(组)严格依照中铁隧道集团测量管理办法要求并考虑本工程具体特点,进行相互间多级完全复测,并将每次导线复测成果报送测量中心审核。
7.1洞内导线测量
以竖井联系测量导入的井下导线定向边为洞内施工控制导线起始边,沿隧道设计方向布设导线,导线点全部采用强制对中(如图13所示),以降低点位对中误差的影响。
在直线段上导线平均边长宜为200m,曲线地段导线平均边长宜为70m,依现场实际情况尽量采用长边。
同时保证前后视距差不超过1∶2的关系,角度测量中误差达到±2.5″,测距相对中误差达到1/60000。
洞内导线点布置如图7-1所示。
图7-1:
隧道内导线点布设示意图
7.2洞内水准测量
以竖井传递的水准点为基准点,沿隧道直线段每200m左右布设一固定水准点,曲线段每150m左右布设一个水准点、按国家四等水准测量施测,复测频率以复测洞内控制导线点复测频率一致。
地下控制水准测量采用和地面精密水准点同等精度施测;地下施工水准测量可采用DS3自动安平水准仪和5m塔尺进行往返观测,其闭合差应满足±8
mm(L以km计)。
隧道开挖至全长的1/3处、2/3处、贯通前100~200m时需要对地下水准点按精密水准测量技术要求进行复核,确保高程贯通精度。
7.3隧道内控制测量成果的多级复核
根据隧道掘进的延伸定期或不定期对洞内的导线控制点进行三级完全复核测量,具体复测频率、复测方法根据以下情况决定:
(1)、项目测量组,掘进每200m左右时需重新对洞内的导线控制点进行复测,尤其是距离盾构较近部分的导线边角关系应严格按照精密导线精度控制标准进行,整体导线复测按照主副导线闭合环进行复测,检查隧道内控制点稳定性。
(2)、处精测队应在盾构连续推进400米左右时进行隧道控制导线及控制水准网进行复测,并针对精度较低区段加密测量频率,分析原因确保测量结果可靠性。
(3)、测量中心应在盾构始发100米、连续推进600米及贯通前100米时进行隧道控制导线及控制水准网进行复测,并针对精度较低区段加密测量频率,分析原因确保测量结果可靠性,并结合三级复核结果确定工程测量控制网使用结果。
(4)、项目测量组负责人员应对每次测量结果进行全面分析,及时反馈与分析测量结果中存在的问题,并采取主动措施确保测量测量系统满足规范要求。
7.4地下控制导线测量引起的横向贯通误差分析
由于我标段区间隧道较多,长短不一,故贯通误差分析按照最长区间隧道,最不利条件分析计算。
我标段最长区间隧道长1703m,根据实际导线布局及误差分析理论估算隧道内控制测量引起的隧道贯通面上的横向贯通误差如下:
(1)地面导线测量误差对横向贯通精度的影响:
①由地面控制测量测角误差引起的横向贯通误差
---测角的各导线点至贯通面的垂距的平方和。
②由地面控制测量侧边误差引起的横向贯通误差
③由地面导线测量误差引起的横向贯通误差
(2)联系测量定向误差引起的横向贯通误差:
该计算依据一井定向测量误差进行分析。
一井定向的误差主要由边长测量、角度测量和吊锤投点三部分作业产生;当边长和角度均满足三角形定向要求时,测角误差为主要影响因素测距误差可忽略不计。
取b/a=1.5,得:
(3)地下控制测量误差引起的横向贯通误差:
地下导线随着盾构的掘进而不断延长,对于等边延伸的地下导线,测边误差对横向贯通误差的影响可忽略不计,横向贯通误差主要有角度测量误差引起。
则按照最不利导线(等边支导线)计算横向贯通中误差:
(4)贯通精度分析结果:
根据上述的各项测量误差估算,本标段区间的最大横向贯通误差为:
满足测量规范要求。
八、掘进施工测量
8.1盾构始发姿态控制测量
①洞门的复核测量
以导入的地下平面和高程控制点为基准,检查洞门里程、中线、高程、预埋钢环的位置。
合格后放样洞门,作为洞门端墙凿除的依据。
②盾构始发高程控制
安装盾构导轨(始发架)时,测设其坡度和高程,确保基座坡度与隧道设计坡度一致,高程与设计值较差小于2mm。
③盾构始发方向控制
沿隧道方向测设中线点,通过隧道中线点确定出盾构始发基座轴线,始发基座轴线要与隧道中线及盾构机轴线一致。
8.2盾构推进测量
我标段土压盾构区间测量导向系统为英国的ZED激光系统;泥水盾构区间测量导向系统拟采用德国的VMT系统。
盾构推进测量以激光导向系统为主,辅以人工测量校核。
8.2.1ZED激光系统简介
(1)ZED导向系统工作原理
由激光全站仪发射出一束可见红色激光束,激光束照射到激光接收靶,激光靶相对于掘进机的位置已精确测定,水平角是由激光束照射到激光靶的入射角决定的。
在激光靶内部安装有一个检测激光靶倾角和转角的双轴传感器,可以分别测激光靶的上下倾角、左右倾角和入射点相对于激光靶的中心线的旋转角。
激光发射站到激光靶的距离由激光全站仪的EMD测定。
这样,当设站坐标和后视坐标确定后,激光靶的坐标和方位就确定下来了。
根据激光靶中心和盾构机主机轴线的几何关系,就可以确定盾构机的轴线。
再把隧道设计中心线的坐标预先输入隧道掘进软件,就可以全天候的动态显示盾构机掘进轴线和隧道设计中心线之间的关系。
当掘进一段距离后,全站仪发出的激光受距离、环境中灰尘、水汽、盾构机结构等因素影响,导致测量精度下降。
因此、测站必须随着盾构机定期前移(全站仪的搬站)。
搬站时平面坐标由已复核过的洞内控制导线边作为起始边,引至设站支架上(支架上设强制对中点)。
高程采用往返测,往返测高差不超过8
mm。
直线段每100~150米,曲线段每40~80米搬站一次。
盾构推进时,主司机可根据显示的偏差及时调整盾构机的掘进姿态,使得盾构机能够沿着正确的方向掘进。
(2)ZED导向系统包括下列硬件
①集成光靶单元
②处理器显示单元
③链接盒
④全站仪(LeicaTCA1203+)
⑤附件(测量棱镜、基座、工具箱、手册等)
图8-1:
ZED激光导向系统硬件图
(3)VMT导向系统包括下列软件
①采集系统中各种相关组件的测量数据(激光靶、倾斜仪、PLC)
②将指挥全站仪的各种命令发向全站仪
③计算并对全站仪的定位自动进行设置
④记录油缸的行程
⑤对各种显示的姿态结果进行处理并存档
图8-2:
ZED激光导向系统导向界面
8.2.2VMT系统简介
(1)VMT导向系统工作原理
VMT导向系统采用VMT公司最新的TUnIS激光导向系统,该系统基于架设在盾构机内部的全站仪和激光靶,可精确测量盾构机的三维姿态。
图8-3:
TUnIS激光导向系统简图
本系统的主要部
 升级会员
升级会员 