机械能经典习题带答案解析.docx
《机械能经典习题带答案解析.docx》由会员分享,可在线阅读,更多相关《机械能经典习题带答案解析.docx(19页珍藏版)》请在冰豆网上搜索。
机械能经典习题带答案解析
/
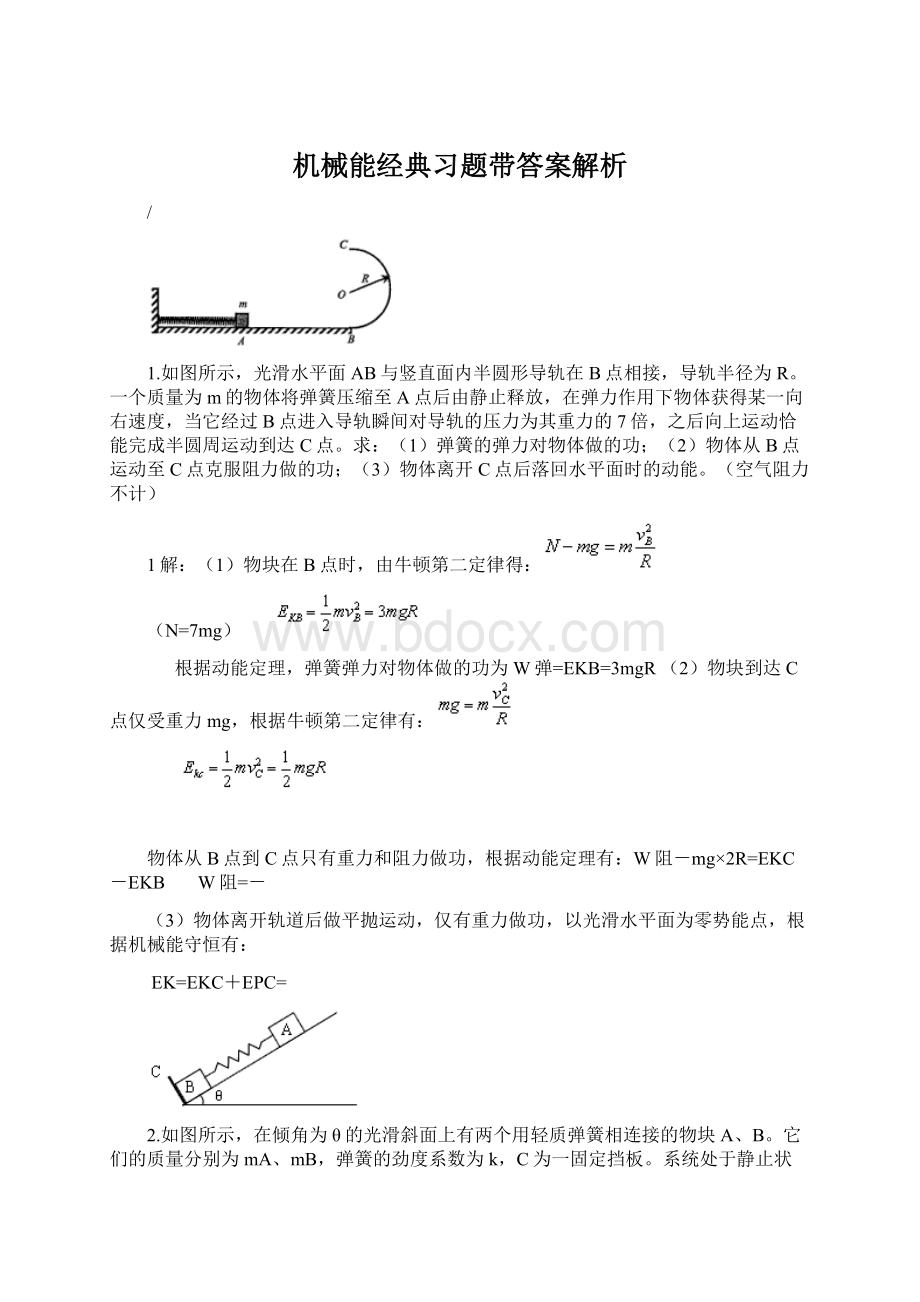
1.如图所示,光滑水平面AB与竖直面内半圆形导轨在B点相接,导轨半径为R。
一个质量为m的物体将弹簧压缩至A点后由静止释放,在弹力作用下物体获得某一向右速度,当它经过B点进入导轨瞬间对导轨的压力为其重力的7倍,之后向上运动恰能完成半圆周运动到达C点。
求:
(1)弹簧的弹力对物体做的功;
(2)物体从B点运动至C点克服阻力做的功;(3)物体离开C点后落回水平面时的动能。
(空气阻力不计)
1解:
(1)物块在B点时,由牛顿第二定律得:
(N=7mg)
根据动能定理,弹簧弹力对物体做的功为W弹=EKB=3mgR
(2)物块到达C点仅受重力mg,根据牛顿第二定律有:
物体从B点到C点只有重力和阻力做功,根据动能定理有:
W阻-mg×2R=EKC-EKB W阻=-
(3)物体离开轨道后做平抛运动,仅有重力做功,以光滑水平面为零势能点,根据机械能守恒有:
EK=EKC+EPC=
2.如图所示,在倾角为θ的光滑斜面上有两个用轻质弹簧相连接的物块A、B。
它们的质量分别为mA、mB,弹簧的劲度系数为k,C为一固定挡板。
系统处于静止状态。
现开始用一恒力F沿斜面方向拉物块A使之向上运动,求物块B刚要离开C时物块A的加速度a和从开始到此时物块A的位移d。
重力加速度为g。
2.解:
令x1表示未加F时弹簧的压缩量,由胡克定律和牛顿定律可知 mAgsinθ=kx1 ① 令x2表示B刚要离开C时弹簧的伸长量,a表示此时A的加速度,由胡克定律和牛顿定律可知 kx2=mBgsinθ② F-mAgsinθ-kx2=mAa③ 由②③式可得a=
④ 由题意d=x1+x2 ⑤ 由①②⑤式可得d=
《
3.如图所示装置由AB、BC、CD三段轨道组成,轨道交接处均由很小的圆弧平滑连接,其中轨道AB、CD段是光滑的,水平轨道BC的长度s=5m,轨道CD足够长且倾角θ=37°,A、D两点离轨道BC的高度分别为h1=、h2=.现让质量为m的小滑块自A点由静止释放.已知小滑块与轨道BC间的动摩擦因数μ=,重力加速度g取10m/s2,sin37°=、cos37°=.求:
(1)小滑块第一次到达D点时的速度大小;
(2)小滑块第一次与第二次通过C点的时间间隔;(3)小滑块最终停止的位置距B点的距离.
3.解:
(1)小物块从A→B→C→D过程中,由动能定理得
将
、
、s、μ、g代入得:
=3m/s
(2)小物块从A→B→C过程中,由动能定理得
将
、s、μ、g代入得:
=6m/s 小物块沿CD段上滑的加速度大小
=g
=6m/s2 小物块沿CD段上滑到最高点的时间
=1s 由于对称性可知小物块从最高点滑回C点的时间
=1s 故小物块第一次与第二次通过C点的时间间隔
=2s (3)对小物块运动全过程利用动能定理,设小滑块在水平轨道上运动的总路程为
,有:
将
、μ、g代入得:
= 故小物块最终停止的位置距B点的距离为2s-
=
4.如图所示,小球从h高的光滑斜面滚下,经有摩擦的水平地面再滚上另一光滑斜面,当它达到
高时,速度变为零,求小球最终停在何处
4.小球在斜面上受重力与斜面的弹力作用,斜面弹力与小球位移垂直,不做功,小球只有重力做功,机械能守恒.设小球在A、B点速度为
、
则有
. ①
②
在水平地面上,摩擦力f做的功等于小球动能的变化
.
③
联立解①②③式得:
. ④
小球最后停下,由动能定理有:
⑤
联立解②⑤式得:
⑥
联立解④⑥式得:
故小球最终停止A、B的中点处.
小球在光滑斜面上运动时,只有重力做功,机械能守恒;小球在粗糙水平面上运动,要克服摩擦力,机械能不守恒.
-
5:
如图3所示,一固定的斜面,
另一边与地面垂直,顶上有一定滑轮,一软弱的细线跨过定滑轮,两边分别与A\B连接,A的质量为4m,B的质量为m,开始时将B按在地面上不动,然后放开手,让A沿斜面下滑而B上升,物块A与斜面间无摩擦,设当A沿斜面下滑s距离后,细线突然断了,求物块B上升的最大距离H。
析与解:
取A、B及地球为系统:
①
对B:
②
③
由①②③得:
…
滑块
O
6图中滑块和小球的质量分别为2m、m,滑块可在水平放置的光滑固定导轨上自由滑动,小球与滑块上的悬点O由一不可伸长的轻绳相连,绳长为L,开始时轻绳处于水平拉直状态,小球和滑块均静止。
现将小球由静止释放,当小球到达最低点时,滑块刚好被一表面涂有粘住物质的固定挡板粘住,在极短的时间内速度减为零,小球继续向左摆动,当轻绳与竖直方向的夹角θ=60°时小球达到最高点。
求小球第一次刚到达最低点时,滑块的速率υ1和小球速率υ2。
解:
设小球第一次到达最低点时,滑块和小球速度的大小分别为υ1、υ2,由机械能守恒定律得
·2mυ12+
mυ22=mgL小球由最低点向左摆到最点时,由机械能守恒定律得
mυ22=mgL(1–cos60°)由以上两式解得υ1=
υ2=
7.如图甲所示,质量m=1kg的物体静止在倾角α=30°的粗糙斜面体上,两者一起向右做匀速直线运动,则在通过水平位移s=1m的过程中,
(1)物体所受的重力、弹力、摩擦力对物体各做了多少功(取g=10m/s2)
(2)斜面对物体做了多少功
】
解析:
(1)物体的受力情况如图乙所示,由平衡条件得:
FN=mgcosα,f=mgsinα
f与s的夹角为α,FN与s的夹角为(90°+α)
由W=Fscosα得:
重力对物体做的功W1=mgscos90°=0
弹力FN对物体做的功为:
W2=mgcosα·scos(90°+α)=-
摩擦力f对物体做的功W3=mgsinα·scosα=
<
(2)解法一 斜面对物体的作用力即FN与f的合力,由平衡条件可知,其方向竖直向上,大小等于mg,其做的功为:
W面=F合·scos90°=0
解法二 斜面对物体做的功等于斜面对物体各力做功的代数和,即W面=W2+W3=
答案:
(1)0 -
(2)0
8.如图所示,绷紧的传送带与水平面的夹角θ=300,皮带在电动机的带动下,始终保持V0=2m/s的速度运行。
现把一质量为m=10kg的工件(可视为质点)轻轻放在皮带的底端,经时间,工件被传送到h=的高处,取g=10m/s2。
求
(1) 工件与皮带间的动摩擦因数
(2) 电动机由于传送工件多消耗的电能
:
(1)设工件先匀加速再匀速
=
t1+v0(t-t1)匀加速时间t1=" " 匀加速加速度a=
=s2μmgcosθ-mgsinθ=ma∴μ=
(2)皮带在匀加速时间内位移s皮=v0 t1=工件匀加速位移s1=
t1=工件相对皮带位移s相=s皮-s1=摩擦生热Q=μmgcosθs相=60J工件获得动能Ek=
mv02=20J工件增加势能Ep=mgh=150J电动机多消耗的电能E=Q+Ek+Ep=230J
9.如图所示,质量分别为2m和3m的两个小球固定在一根直角尺的两端A、B,直角尺的顶点O处有光滑的固定转动轴。
AO、BO的长分别为2L和L。
开始时直角尺的AO部分处于水平位置而B在O的正下方。
让该系统由静止开始自由转动,
求:
⑴当A到达最低点时,A小球的速度大小v;
直角尺和两个小球组成的系统机械能守恒
(1)由
10质量不计的直角形支架两端分别连接质量为m和2m的小球A和B.支架的两直角边长度分别为2l和l,支架可绕固定轴O在竖直平面内无摩擦转动,如图所示.开始时OA边处于水平位置,由静止释放,则(ac )
A.A球的最大速度为
B.A球的速度最大时,两小球的总重力势能为零
/
C.AB两球的最大速度之比v1:
v2=2:
1
B
A
O
D.A球的速度最大时A球在竖直位置
:
11.一根质量不计的细杆长为2L,一端固定在光滑的水平转轴O上,在杆的另一端和杆的中点各固定一个质量为m的小球,然后使杆从水平位置由静止开始,在竖直平面内自由下摆,如图所示,试求:
⑴杆向下摆至竖直位置时,两球的速度.
⑵杆从水平位置向下摆至竖直位置的过程中,杆对球B所做的功.
⑶摆至竖直位置时,杆OA和AB的张力T1、T2之比.
解:
(1)vB=2vAmgL+2mgL=
mvA2+
mvB2
vA=
vB=
(2)对小球B,由动能定理可得:
2mgL+W=
mvB2W=
mgL
(3)T2-mg=
T2=
mg
|
T1-T2-mg=
T1=
mgT1:
T2=28:
17
12.如图所示,倾角为θ光滑斜面上放有两个质量均为m的小球A和B,两球之间用一根长为L的轻杆相连,下面的小球B离斜面底端的高度为h,两球从静止开始下滑,不计球与地面碰撞时的机械能损失,且地面光滑,
求:
(1)两球在光滑水平面上运动时的速度大小;
(2)此过程中杆对A球所做的功;
解:
(1)两球系统机械能守恒,在水平面运动时速度相等,由机械能守恒定律:
(2)因两球在光滑水平面运动的速度v比B球从h处自由下落的速度
大,增加的动能就是杆对B做正功的结果,B增加的动能为
,因系统机械能守恒,杆对A做负功,且
,
、
θ
h
A
B
13.如图所示,跨过同一高度处的光滑滑轮的细线连接着质量相同的物体A和B。
A套在光滑水平杆上,细线与水平杆的夹角θ=53°。
定滑轮离水平杆的高度为h=m,当B由静止释放后,A所能获得的最大速度为多少(cos53°=,sin53°=
?
解:
物体A在绳的拉力作用下向右做加速运动,B向下加速运动,vB=vAcosθ,当A运动到滑轮的正下方时,速度达最大值,此时A沿绳方向速度为零,故B的速度为零.对A、B组成的系统,由机械能守恒定律有:
,vA=1m/s
F
β
B
A
—
α
H
图5-1-3
14.如图5-1-3在光滑的水平面上,物块在恒力F=100N的作用下从A点运动到B点,不计滑轮的大小,不计绳与滑轮的质量及绳、滑轮间的摩擦,H=m,α=37°,β=53°,求绳的拉力对物体所做的功.
【解析】绳的拉力对物体来说是个变力(大小不变,方向改变),但分析发现,人拉绳却是恒力,于是转换研究对象,用人对绳子做的功来求绳对物体所做的功W=F·l=F(
)=100J
【答案】W=F·l=F(
)=100J
图5-1-4
15.物块从光滑曲面上的P点自由滑下,通过粗糙的静止水平传送带以后落到地面上的Q点,若传送带的皮带轮沿逆时针方向转动起来,使传送带随之运动,如图5-1-4所示,再把物块放到P点自由滑下则( )
<
A.物块将仍落在Q点
B.物块将会落在Q点的左边
C.物块将会落在Q点的右边
D.物块有可能落不到地面上
【错解】因为皮带轮转动起来以后,物块在皮带轮上的时间长,相对皮带位移量大,摩擦力做功将比皮带轮不转动时多,物块在皮带右端的速度将小于皮带轮不动时,所以落在Q点左边,应选B选项.【错因】学生的错误主要是对物体的运动过程中的受力分析不准确.实质上当皮带轮逆时针转动时,无论物块以多大的速度滑下来,传送带给物块施的摩擦力都是相同的,且与传送带静止时一样,由运动学公式知位移相同.从传送带上做平抛运动的初速度相同,水平位移相同,落点相同.
【正解】物块从斜面滑下来,当传送带静止时,在水平方向受到与运动方向相反的摩擦力,物块将做匀减速运动.离开传送带时做平抛运动.当传送带逆时针转动时物体相对传送带都是向前运动,受到滑动摩擦力方向与运动方向相反.物体做匀减速运动,离开传送带时,也做平抛运动,且与传送带不动时的抛出速度相同,故落在Q点,所以A选项正确.
F
;
图5-1-8
16..如图5-1-8所示,滑轮和绳的质量及摩擦不计,用力F开始提升原来静止的质量为m=10kg的物体,以大小为a=2m/s2的加速度匀加速上升,求头3s内力F做的功.(取g=10m/s2)(1080)
:
m
M
A
B
%
C
图5-5-15
17.如图5-5-15所示,一轻绳的两端各系一小球(可视为质点),质量分别为M和m(M>m),跨放在一个光滑的半圆柱体上.两球由水平直径AB的两端由静止释放,当m刚好到达圆柱体的最高点C时,恰好脱离圆柱体.则两小球的质量之比为多少
【解析】经分析可知,A、B运动时系统内只有动能和重力势能的相互转化,所以系统的机械能守恒,由机械能守恒有
又m在最高点C时作圆周运动,恰好脱离圆柱体,由牛顿第二定律有
由可解得
^
C
A
B
D
图5-6-1
18.一质量均匀不可伸长的绳索,重为G,A、B两端固定在天花板上,如图5-6-1所示,今在最低点C施加一竖直向下的力,将绳索拉至D点,在此过程中,绳索AB的重心位置将( )
。
A.升高B.降低C.先降低后升高
D.始终不变
B
L
L
A
C
'
D
图5-6-3
【解析】物体的重心不一定在物体上,对于一些不规则的物体要确定重心是比较困难的,本题绳子的重心是不容易标出的,因此,要确定重心的变化,只有通过别的途径确定.当用力将物体缓慢地从C点拉到D点,外力在不断的做功,而物体(试题分析:
将绳缓慢拉至D点的过程中外力对绳索做功,绳索机械能增加,重力势能增加,重心会逐渐升高,A选项正确,BCD选项错误故选A)
19.(2005年江苏卷)如图5-9-1所示,固定的光滑竖直杆上套着一个滑块,用轻绳系着滑块绕过光滑的定滑轮,以大小恒定的拉力F拉绳,使滑块从A点起由静止开始上升.若从A点上升至B点和从B点上升至C点的过程中拉力F做的功分别为W1、W2,滑块经B、C两点的动能分别为EKB、EKC,图中AB=BC,则一定有()
>W2<W2
>EKC<EKC
【解析】一般在讨论某一力做功情况的时候,就要看这个力在位移方向的累积情况.此题中力F大小恒定.滑块从A到B再到C的过程中,力F与竖直杆之间的夹角逐渐变大,所以力F在竖直杆方向的分力不断减小.这样,在位移大小相同的情况下,力F在AB段累积的功当然多.关于滑块在B、C两点的动能大小的判断,应由合外力在对应过程所做的功来确定.由于此题中力F在AB、BC两段沿竖直杆方向的分力大小与重力大小关系不能确定,所以合外力在AB、BC两段做功正、负情况不能确定.当然也就不能确定滑块在AB、BC两段动能的变化情况,也就不能判断滑块在B、C两点动能的大小.
【答案】A
【点拨】对功、动能定理要深层次从本质理解,不能想当然地套公式.
(
20.如图所示是一个横截面为半圆、半径为R的光滑柱面,一根不可伸长的细线两端分别系着物体A、B,且mA=2mB,由图示位置从静止开始释放A物体,当物体B达到圆柱顶点时,求绳的张力对物体B所做的功
解:
本题要求出绳的张力对物体B做的功,关键是求出物体B到达圆柱顶点时的动能,由于柱面是光滑的,故系统的机械能守恒,系统重力势能的减少量等于系统动能的增加量. 系统重力势能的减少量为
系统动能的增加量为
由△Ep=△Ek得
绳的张力对物体B做的功
21.如图,可视为质点的小球A、B用不可伸长的细软轻线连接,跨过固定在地面上半径为R有光滑圆柱,A的质量为B的两倍.当B位于地面时,A恰与圆柱轴心等高.将A由静止释放,B上升的最大高度是( )
A)2R(B)5R/3(C)4R/3(D)2R/3.
设B的质量为m,则A的质量为2m,以A、B组成的系统为研究对象,在A落地前,由动能定理可得:
-mgR+2mgR=(m+2m)v2-0,
以B为研究对象,在B上升过程中,由动能定理可得:
-mgh=0-1/2mv2,
%
则B上升的最大高度H=R+h,解得:
H=4R/3
22.总质量为M的列车,沿平直轨道匀速前进.末节车厢质量为m,在行驶中途脱钩,司机发现后关闭发动机时,机车已经驶了L,设运动阻力与质量成正比,机车发动机关闭前牵引力是恒定的,则两部分停止运动时,它们之间的距离是多少
【解析】本题有两个研究对象,可分别对它们应用动能定理.
对列车部分有:
.①
对脱钩车厢有:
②
列车匀速行驶有:
③
由①②③可解得:
另解:
从整体角度出发,把两部分作为一个系统来分析:
若脱钩时立即关闭发动机,则车头部分和脱钩车厢应前进同样距离,现在之所以在停止时拉开一定距离,是因为牵引力F在L的路程上做了功,机车的动能多了一些,能够克服阻力多走一段距离,可见F在L路程上做的功应等于阻力在ΔS距离上做的功.即
又
解之得
23.如图所示,一辆玩具小车静止在光滑的水平导轨上,一个小球用细绳悬挂在车上,由图中位置无初速释放,则小球在下摆过程中,下列说法正确的是( )
A
.绳对车的拉力对车做正功
B.绳的拉力对小球做正功
C.小球所受的合力对小球不做功
D.绳的拉力对小球做负功
由于车和球这个系统水平方向上动量守恒,所以当小球下摆时,车子也会随之反方向移动.根据动能定理可知:
△EK=WF,动能增加,绳对车的拉力对车做正功,故A正确;由于车和球这个系统水平方向上动量守恒,所以当小球下摆时,车子也会随之反方向移动.这时小球运动的轨迹将与绳子不垂直,夹角大于90°,做负功,故D正确,B错误;对小球运用动能定理得:
△EK=W合,小球动能增加,合力对小球做正功,故C错误.故选AD.
年在加拿大城市温哥华举办的冬奥会上,瑞典女队又一次获得冰壶比赛世界冠军.运动员以一定的初速度将冰壶沿水平面抛出,由于摩擦阻力的作用,其动能随位移变化图线如图所示,已知冰壶质量为19kgg取10m/s2,则以下说法正确的是( D )
A.μ=B.μ=
C.滑行时间t=5sD.滑行时间t=10s
25.将三个木板1、2、3固定在墙角,木板与墙壁和地面构成了三个不同的三角形,如图所示,其中1与2底边相同,2和3高度相同.现将一个可以视为质点的物块分别从三个木板的顶端由静止释放,并沿木板下滑到底端,物块与木板之间的动摩擦因数μ均相同.在这三个过程中,下列说法不正确的是( A )
A.沿着1和2下滑到底端时,物块的速度大小不相等;沿着2和3下滑到底端时,物块的速度大小相等
B.沿着1下滑到底端时,物块的速率最大
C.物块沿着3下滑到底端的过程中,产生的热量是最多的
D.物块沿着1和2下滑到底端的过程中,产生的热量是一样多的
 升级会员
升级会员 