完整版MPC184总结.docx
《完整版MPC184总结.docx》由会员分享,可在线阅读,更多相关《完整版MPC184总结.docx(21页珍藏版)》请在冰豆网上搜索。
完整版MPC184总结
滞后摩擦行为:
沿着未约束相对运动分量的摩擦行为影响链接的整个力学行为。
链接单元的滞后摩擦行为可以用TB,JOIN和适当的TBOPT选项来设定。
相对位移(或转动)与力(力矩)曲线可以通过TBDATA命令设定。
力的值必须为正。
参见图184.5:
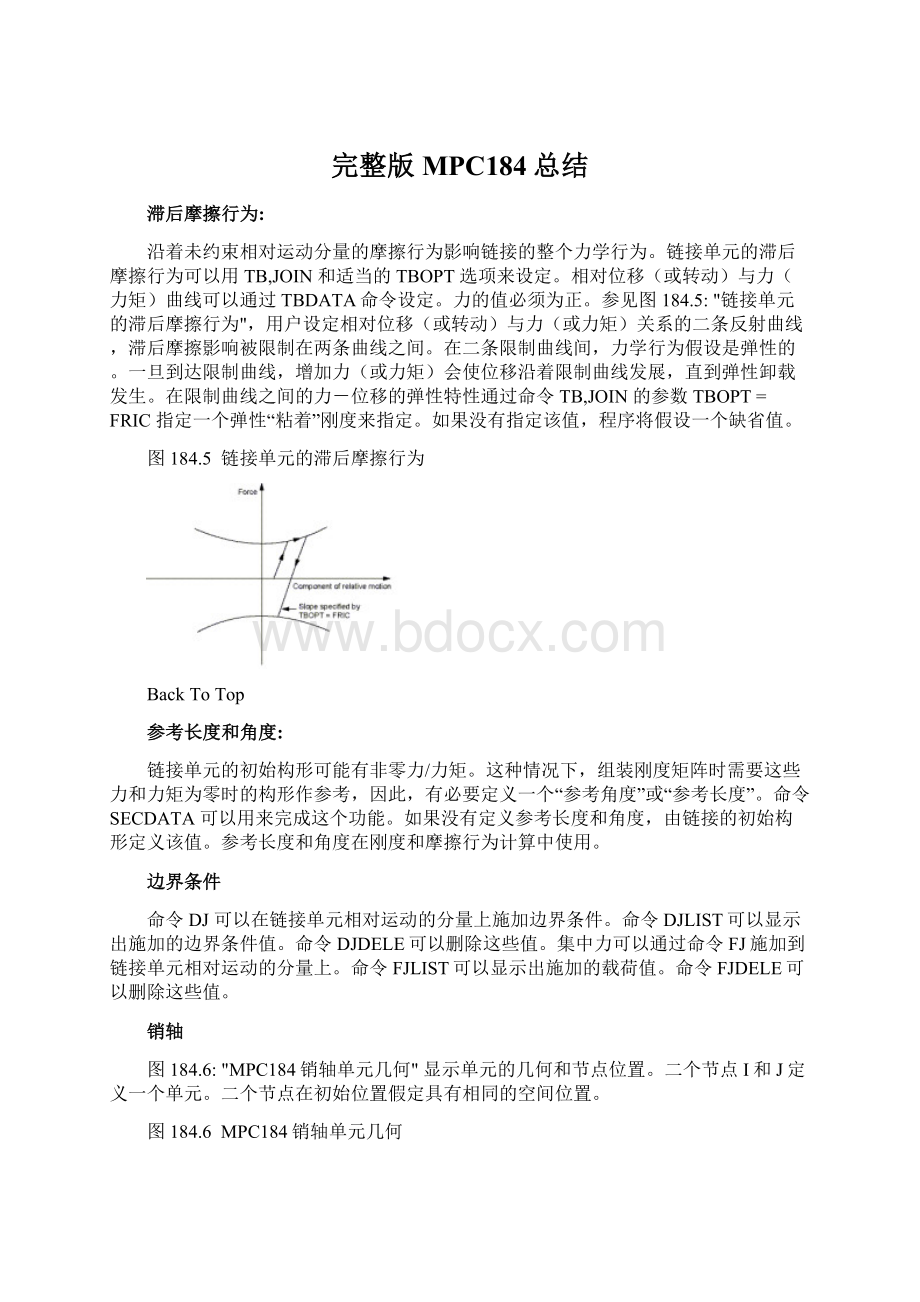
"链接单元的滞后摩擦行为",用户设定相对位移(或转动)与力(或力矩)关系的二条反射曲线,滞后摩擦影响被限制在两条曲线之间。
在二条限制曲线间,力学行为假设是弹性的。
一旦到达限制曲线,增加力(或力矩)会使位移沿着限制曲线发展,直到弹性卸载发生。
在限制曲线之间的力-位移的弹性特性通过命令TB,JOIN的参数TBOPT=FRIC指定一个弹性“粘着”刚度来指定。
如果没有指定该值,程序将假设一个缺省值。
图184.5 链接单元的滞后摩擦行为
BackToTop
参考长度和角度:
链接单元的初始构形可能有非零力/力矩。
这种情况下,组装刚度矩阵时需要这些力和力矩为零时的构形作参考,因此,有必要定义一个“参考角度”或“参考长度”。
命令SECDATA可以用来完成这个功能。
如果没有定义参考长度和角度,由链接的初始构形定义该值。
参考长度和角度在刚度和摩擦行为计算中使用。
边界条件
命令DJ可以在链接单元相对运动的分量上施加边界条件。
命令DJLIST可以显示出施加的边界条件值。
命令DJDELE可以删除这些值。
集中力可以通过命令FJ施加到链接单元相对运动的分量上。
命令FJLIST可以显示出施加的载荷值。
命令FJDELE可以删除这些值。
销轴
图184.6:
"MPC184销轴单元几何"显示单元的几何和节点位置。
二个节点I和J定义一个单元。
二个节点在初始位置假定具有相同的空间位置。
图184.6 MPC184销轴单元几何
必须在单元的第一个节点I上指定一个局部坐标系,可以在节点J上指定另一个局部坐标系。
如果没有在节点J上指定局部坐标系,它的坐标系假定与节点I的相同。
局部坐标的1方向通常指定沿着节点的旋转轴线上,局部坐标的2和3方向指定不是很严格。
但是在变形过程中,它们将用来决定二个节点的相对旋转。
局部坐标的方向符合图184.6:
"MPC184销轴单元几何"中定义的惯例。
局部坐标系随着相应的节点一起旋转(如果可能)。
使用命令SECJOINT定义局部坐标系的标识。
施加在销轴链接单元的约束很容易由附着在节点I和J上的二个坐标系(笛卡尔)描述。
(见图184.6:
"MPC184销轴单元几何")。
在任何时刻,施加在销轴单元上的约束如下(图184.6:
"MPC184销轴单元几何"):
位移约束:
uI=uJ
其中,uI是节点I的位移矢量,uJ是节点J的位移矢量。
转动约束:
如果销轴
和
在分析开始时不一致,二者的角度始终固定在初始值上。
节点I与节点J的局部坐标系相对位置用第一Bryant(或Cardan)角表示,公式如下:
二个局部坐标系间相对角度变化由下式表示:
ur=φ-φ0+mπ
其中,φ0为二个局部坐标系初始偏移角(在参考构形中测量的第一Bryant角(或Cardan角)),m为一个整数,为绕旋转轴转动的圈数。
本构矩阵计算中使用如下的链接转动定义:
其中:
是参考角度“angle1”,由命令SECDATA定义。
如果没有定义,由φ0代替
。
该单元目前不支持生死选项。
MPC184销轴单元输入数据概述总结了单元输入。
MPC184销轴单元输出数据提供单元输出的总体描述。
万向联轴器单元
图184.7:
"MPC184万向联轴器几何"显示单元的几何和节点位置。
二个节点I和J定义一个单元。
二个节点在初始位置假定具有相同的空间位置。
图184.7 MPC184万向联轴器几何
必须在单元的第一个节点I上指定一个局部坐标系,可以在节点J上指定另一个局部坐标系。
如果没有在节点J上指定局部坐标系,它的坐标系假定与节点I的相同。
局部坐标的2方向通常指定沿着节点的旋转轴线上。
局部坐标的方向符合图184.7:
"MPC184万向联轴器几何"中定义的惯例。
局部坐标系随着相应的节点一起旋转(如果可能)。
使用命令SECJOINT定义局部坐标系的标识。
施加在万向联轴器单元的约束很容易由附着在节点I和J上的二个坐标系(笛卡尔)描述(图184.7:
"MPC184万向联轴器几何")。
在任何时刻,施加在万向联轴器单元上的约束如下:
位移约束:
uI=uJ
其中,uI是节点I的位移矢量,uJ是节点J的位移矢量。
转动约束:
和
在分析开始时不一致,二者的角度始终固定在初始值上。
节点I与节点J的局部坐标系相对位置用第一Bryant(或Cardan)角表示,公式如下:
如果轴
和
在分析开始时不一致,二者的角度始终固定在初始值上。
节点I与节点J的局部坐标系相对位置用第三Bryant(或Cardan)角表示,公式如下:
二个局部坐标系间相对角度变化由下式表示:
ur4=φ-φ0
ur6=ψ-ψ0
其中,φ0和ψ0为二个局部坐标系初始偏移角(在参考构形中测量的第一和第三Bryant角(或Cardan角))。
本构矩阵计算中使用如下的链接转动定义:
其中,
和
为参考角“angle1”和“angle3”,在命令SECDATA作相应的定义。
如果没有指定该值,
和
由φ0和ψ0值代替。
该单元目前不支持生死选项。
MPC184万向联轴器单元输入数据概述总结了单元输入。
MPC184万向联轴器单元输出数据提供单元输出的总体描述。
MPC184输入数据概述
节点
I,J当KEYOPT
(1)=0,1,5,6,7(刚性杆,刚性梁,球铰,销轴和万向联轴器)
I,J,K当KEYOPT
(1)=3(滑块)
自由度
2-D:
UX,UY,如果KEYOPT
(1)=3,5且KEYOPT
(2)=1
3-D:
UX,UY,UZ如果KEYOPT
(1)=0,3,5
UX,UY,UZ,ROTX,ROTY,ROTZ如果KEYOPT
(1)=1,6,7
实常数
无
材料特性
DAMP,ALPX(orCTEXorTHSX),DENS当刚性杆、刚性梁(KEYOPT
(1)=0或1)
无,当KEYOPT
(1)=3,5
当KEYOPT
(1)=6或7:
使用命令TB中的JOIN标识。
(定义链接单元材料的详细信息见MPC184链接材料)
线性刚度和阻尼:
输入一个6x6矩阵(Dij)的值。
对命令TBOPT,使用下述方法之一:
STIF-
线性刚度
销轴单元仅输入D44。
万向联轴器输入D44,D64和D66。
DAMP-
线性阻尼
销轴单元仅输入D44。
万向联轴器输入D44,D64和D66的任何或全部值。
命令TB可以使用同一材料号同时定义刚度和阻尼行为。
非线性刚度行为:
销轴链接单元(KEYOPT
(1)=6)
TBOPT设置使用如下选项之一:
JNSA或JNS4–为销轴旋转指定非线性刚度特性。
万向联轴器链接单元(KEYOPT
(1)=7)
TBOPT设置使用如下选项之一:
JNSA–为相对运动的所有未约束分量指定非线性刚度特性。
JNS4–仅为相对运动的ROTX分量指定非线性刚度特性。
JNS6–仅为相对运动的ROTZ分量指定非线性刚度特性。
非线性阻尼行为:
销轴单元(KEYOPT
(1)=6)
TBOPT设置使用如下选项之一:
JNDAorJND4-为销轴旋转指定非线性阻尼特性。
万向联轴器链接单元(KEYOPT
(1)=7)
TBOPT设置使用如下选项之一:
JNDA–为相对运动的所有未约束分量指定非线性阻尼特性。
JND4–仅为相对运动的ROTX分量指定非线性阻尼特性。
JND6–仅为相对运动的ROTZ分量指定非线性阻尼特性。
面力
无
体力
温度 --
T(I),T(J)当KEYOPT
(1)=0或1
无 --
当KEYOPT
(1)>=2
单元载荷
无 --
forKEYOPT
(1)<=5
转动自由度 --
ROTXforKEYOPT
(1)=6
ROTX,ROTZforKEYOPT
(1)=7
力矩 --
MXforKEYOPT
(1)=6
MX,MZforKEYOPT
(1)=7
特性
大变形(适用于所以KEYOPT
(1)设置)
单元生死(仅适用于KEYOPT
(1)=0或1)
KEYOPT
(1)
单元行为:
0 --
刚性杆(缺省值)
1 --
刚性梁
3 --
滑块单元
5 --
球铰单元
6 --
销轴单元
7 --
万向联轴器单元
KEYOPT
(2)
指定3-D或2-D模型(当KEYOPT
(1)=3或5时有效):
0 --
3-D单元(缺省值)
1 --
2-D单元
Re:
ANSYS中,刚性连接应该选择哪一种单元类型?
MPC184
多点约束单元:
刚性杆,刚性梁,滑块,球铰,销轴和万向联轴器
MP ME ST <> <> PR <> <> <> PP ED
MPC184单元描述
MPC184包括使用拉格朗日乘子法实现运动约束的一类常用的多点约束单元。
这些单元可以简单地分为“约束单元”或“连接单元”。
用户可以在一些需要施加运动约束的场合中使用这些单元。
这些约束可以简单到铰链上的具有相同的位移值,也可以复杂到包括模型的刚性部分,或者在柔性体之间以某一特定方式传递运动的运动约束。
例如,结构中可能包含一些刚性部件或者通过转动或滑块约束连接在一起的运动部件。
结构的刚性部分可以使用MPC184的刚性杆或刚性梁单元来模拟,运动部分可以使用MPC184的滑块,球铰,销轴和万向联轴器单元模拟。
因为这些单元使用拉格朗日乘子法实现,ANSYS能够输出约束反力和力矩。
使用的约束类型取决于实际的应用场合。
约束单元
如果没有其它说明,使用这些单元时,三维单元选项(KEYOPT
(2) = 0)为默认值。
刚性杆/梁
图184.1 MPC184几何
MPC184可以用来模拟两个变形体之间的刚性约束,或者在工程模型中模拟传递力和力矩的刚性部件。
这个单元也可以应用在由其它刚性结构热膨胀引起的变形分析中。
如果KEYOPT
(1) = 0 (默认值),单元为刚性杆,有二个节点,每个节点有三个自由度(仅有平移)。
如果KEYOPT
(1) = 1,单元为刚性梁,有二个节点,每个节点有六个自由度(X,Y,Z三个方向的平移和转动)。
该单元适合线性,大转动,大应变非线性情况。
滑块
设置KEYOPT
(1) = 3来定义三节点的滑块单元。
3维滑块单元(KEYOPT
(2) = 0)每个节点有三个自由度(x,y和z方向平移)。
2维滑块单元(KEYOPT
(2) = 1)每个节点有二个自由度(x,y方向平移)。
滑块单元的运动约束施加方式:
节点K被定义为从节点,该节点的运动轨迹始终在两个主节点(I和J)的连线上。
K节点只允许在I和J节点连线上滑动。
球铰
设置KEYOPT
(1) = 5来定义二节点的球铰。
两个节点必须重合。
3维球铰每个节点有三个自由度(x,y和z方向平移)。
2维球铰单元(KEYOPT
(2) = 1)每个节点有二个自由度(x,y方向平移)。
球铰单元的运动约束施加方式:
组成单元的两个节点平移位移保持一致;不约束转动自由度(如果存在)。
说明
也可以使用CE或CP命令指定二个节点具有相同的位移值,在那种情况下,约束自由度被删除。
然后,对球铰单元而言,约束通过拉格朗日乘子法施加,可以得到约束反力。
使用CE或CP命令施加位移约束通常更有效率,如果可能,尽量使用CE或CP命令代替MPC184球铰单元。
链接单元
数值模拟中经常涉及两个零件连接的问题。
这些链接所承受的运动约束可以简单到两个零件连接处的具有相同的位移值,也可以复杂到模型中两个变形体之间运动的传递。
复杂的链接也可以包括一些控制机构,如限制器或挡块,两个物体相对运动分量的锁定器。
在许多情况下,这些链接还可以包括在两个物体相对运动的未约束分量之间的刚度,阻尼或摩擦行为特性。
销轴链接和万向联轴器广泛应用于汽车,机器人,生物工程和其它行业。
这些链接单元有二个节点。
根据链接的不同定义,在二个节点上施加不同的运动约束。
约束通过拉格朗日乘子法施加。
链接单元在每个节点上有六个自由度,定义六个相对运动分量:
三个相对平移和三个相对转动。
这六个相对运动分量主要用于模拟链接单元运动行为。
对于链接单元,一些分量可能被运动约束限制住了,而另一些分量是“自由的”或者“无约束的”。
万向联轴器和销轴链接单元中,二个节点假设为重合,相对位移为零。
销轴链接单元只有一个相对旋转运动分量-绕着销轴旋转-是没有约束住的,而万向联轴器有两个旋转分量是自由的。
这些单元包括一些控制特性,如挡块,锁定器。
一些激励载荷或边界条件也可以施加到单元的二个节点的相对运动分量上去。
例如,在销轴链接中,可以在销轴旋转方向上设置挡块,限制旋转角度在一个特定范围内。
也可以在二个节点旋转分量上施加位移或力边界条件模拟链接的驱动特性。
驱动力或位移由实际机构―电动或液压系统―提供。
链接单元的未约束相对运动分量上可以施加线性刚度和阻尼特性。
如果需要,可以施加与温度相关的刚度和阻尼特性。
除了ANSYS中已经存在的输出选项,链接单元的相对运动分量也可以输出。
该单元适合线性,大转动,大应变非线性情况。
销轴链接
设置KEYOPT
(1) = 6定义二节点销轴链接。
销轴单元的二个节点必须有相同的空间坐标。
MPC184销轴链接单元只有一个基本自由度-绕着轴或销相对旋转。
单元能够包括控制特性,如未约束自由度上的挡块,锁定器。
旋转边界条件也可以施加到相对运动分量上。
另外,相对旋转方向可以施加线性刚度和阻尼特性。
ANSYS单元库中另一种旋转链接单元是COMBIN7。
COMBIN7单元允许用户控制连接柔度,摩擦,阻尼和其它控制特性。
局部坐标系固定在链接上,并与之一起运动,所以,该单元可以应用于大变形分析中,(更多详细内容参见COMBIN7 - 销轴链接单元)。
MPC184销轴链接单元的节点上施加了运动约束确保节点有相同的位移,另外,只有一个相对旋转轴的转动自由度未被约束,另外二个转动被固定。
万向联轴器
设置KEYOPT
(1) = 7来定义二节点方向联轴器单元。
单元的二个节点必须有相同的空间坐标。
MPC184万向联轴器单元有两个自由的相对转动自由度。
该单元包括控制特性:
相对运动旋转分量上的挡块和锁定器。
也可以在单元两个相对旋转分量上施加旋转边界条件。
另外,可以在单元相对旋转分量上指定线性刚度和阻尼特性。
MPC184输入数据
输入数据因为MPC184约束和链接的不同而不同。
约束输入数据
刚性杆/刚性梁
图184.1 MPC184几何显示了该单元的几何,节点位置和单元坐标系。
单元需定义二个节点。
单元的x轴从节点I指向节点J。
单元截面面积假设为一个单位。
ANSYS自动选择截面坐标系;选择方法参见BEAM4中的描述。
当单元作为刚性梁使用时,截面坐标系仅仅与弯矩输出有关。
因为单元模拟一个刚性约束或刚性部件,材料刚度特性不必输入。
如果要考虑热膨胀效应,热膨胀系数必须指定。
如果分析中要考虑刚性单元的质量,密度必须指定。
如果密度指定,ANSYS在单元使用集中质量矩阵。
该单元支持单元生死特性,使用EALIVE和EKILL实现该功能。
节点和单元载荷描述单元载荷。
可以在节点上输入温度作为单元体载荷。
节点I温度T(I),默认值为TUNIF。
节点J温度默认值为T(I)。
"MPC184输入概述" 总结了单元的输入数据。
"MPC184输出数据" 提供了单元输出的一般描述。
滑块
图184.2:
"MPC184滑块约束几何" 显示单元的几何形状和节点位置。
单元由三个节点(I,J和K)定义。
假设节点I在节点J和K的连线上。
图184.2:
"MPC184滑块约束几何
该单元不需要定义材料刚度特性。
目前不支持单元生死选项。
MPC184滑块单元输入概要总结了单元输入参数。
MPC184滑块单元输出数据提供单元输出的常用描述。
球铰
图184.2:
"MPC184球铰约束几何"显示单元的几何形状和节点位置。
单元由二个节点(I,J和K)定义。
假设节点二个节点(I和J)具有相同的空间坐标。
图184.2:
MPC184球铰约束几何
该单元不必输入材料刚度特性,目前不支持单元生死。
MPC184球铰单元输入概要总结了单元输入参数。
MPC184球铰单元输出数据提供单元输出的常用描述。
链接输入数据
所有MPC184链接单元有一些通用的输入要求。
每个链接单元的特殊要求将在相应章节着重显示。
截面定义
每一个链接单元必须有相应的截面定义。
使用SECTYPE定义截面类型和子类型。
局部坐标系说明
经常在每个节点的局部坐标系定义链接单元的运动约束。
使用命令完成。
局部坐标系和方向对每种链接单元来说可能会不一样。
相应的每个链接单元的输入数据中会注明要求。
典型的局部坐标系总是定义在链接单元的第一个节点上。
第二个节点的局部坐标系是可选的,如果没有定义它,假定和第一节点的坐标系一致。
链接单元二个节点相对运动的旋转分量用Bryant角(或Cardan角)表示,且在局部坐标系下表示。
挡块和限制器
挡块和限制器可以作用在链接单元二个节点之间的相对运动分量上。
挡块和限制器将未约束的自由度的变化值限制在一个范围内。
可以使用命令SECSTOP指定最大最小值。
锁定器
锁定器也可以作用在链接单元二个节点之间的相对运动分量上。
在变形过程中,使用锁定器将链接机构“冻结”在一个希望的构形上。
一旦锁定器在相对运动的某个分量上激活,在以下的分析中,该分量将始终保持锁定。
使用命令SECLOCK 定义锁定器。
材料特性
刚度和阻尼系数:
线性和非线性刚度和阻尼特性可以添加到链接单元相对运动的未约束的自由度上。
线性刚度和线性阻尼值可以使用命令TB,JOIN,并指定TBOPT = STIF 或 TBOPT = DAMP来定义一个6x6的弹性矩阵的系数来设定。
刚度和阻尼值可以是温度相关的。
根据使用的链接单元的不同,刚度和阻尼系数中只有那些正确的系数才参与组装链接单元的单元矩阵。
非线性刚度和阻尼特性使用命令TB,JOIN 和适当的TBOPT 选项来设定。
在非线性刚度中,相对位移(旋转)和力(力矩)的关系由命令TBDATA来设定。
非线性阻尼特性,速度和力的关系用TBDATA 命令了设定。
(代表性的非线性刚度和阻尼曲线见 图184.4:
"链接单元的非线性刚度和阻尼特性")。
在两个例子中,值可以是温度相关的,用TBTEMP 命令单元数据表中的温度。
图184.4 链接单元的非线性刚度和阻尼特性
线性和非线性刚度和阻尼特性可以在每个相对运动分量上单独定义。
然而如果线性刚度系数已经在一个相对运动的未约束自由度上指定了,非线性刚度系数就不能在同样的相对运动分量上指定了。
阻尼系数也有同样的限制。
如果链接单元有一个以上的未约束相对运动自由度(例如,万向联轴器有二个未约束相对运动自由度),每个未约束相对运动自由度分量可以独立地被指定为线性或者非线性刚度和阻尼特性。
________________________________________
Back To Top
滞后摩擦行为
BR>沿着未约束相对运动分量的摩擦行为影响链接的整个力学行为。
链接单元的滞后摩擦行为可以用TB,JOIN 和适当的TBOPT 选项来设定。
相对位移(或转动)与力(力矩)曲线可以通过TBDATA命令设定。
力的值必须为正。
参见图184.5:
"链接单元的滞后摩擦行为"
滞后摩擦行为
BR>沿着未约束相对运动分量的摩擦行为影响链接的整个力学行为。
链接单元的滞后摩擦行为可以用TB,JOIN 和适当的TBOPT 选项来设定。
相对位移(或转动)与力(力矩)曲线可以通过TBDATA命令设定。
力的值必须为正。
参见图184.5:
"链接单元的滞后摩擦行为",用户设定相对位移(或转动)与力(或力矩)关系的二条反射曲线,滞后摩擦影响被限制在两条曲线之间。
在二条限制曲线间,力学行为假设是弹性的。
一旦到达限制曲线,增加力(或力矩)会使位移沿着限制曲线发展,直到弹性卸载发生。
在限制曲线之间的力-位移的弹性特性通过命令TB,JOIN 的参数TBOPT = FRIC 指定一个弹性“粘着”刚度来指定。
如果没有指定该值,程序将假设一个缺省值。
图184.5 链接单元的滞后摩擦行为
Back To Top
参考长度和角度
BR>链接单元的初始构形可能有非零力/力矩。
这种情况下,组装刚度矩阵时需要这些力和力矩为零时的构形作参考,因此,有必要定义一个“参考角度”或“参考长度”。
命令SECDATA 可以用来完成这个功能。
如果没有定义参考长度和角度,由链接的初始构形定义该值。
参考长度和角度在刚度和摩擦行为计算中使用。
边界条件
命令DJ 可以在链接单元相对运动的分量上施加边界条件。
命令DJLIST可以显示出施加的边界条件值。
命令DJDELE可以删除这些值。
集中力可以通过命令FJ施加到链接单元相对运动的分量上。
命令FJLIST可以显示出施加的载荷值。
命令FJDELE可以删除这些值。
销轴
图184.6:
"MPC184销轴单元几何" 显示单元的几何和节点位置。
二个节点I和J定义一个单元。
二个节点在初始位置假定具有相同的空间位置。
图184.6 MPC184销轴单元几何
必须在单元的第一个节点I上指定一个局部坐标系,可以在节点J上指定另一个局部坐标系。
如果没有在节点J上指定局部坐标系,它的坐标系假定与节点I的相同。
局部坐标的1方向通常指定沿着节点的旋转轴线上,局部坐标的2和3方向指定不是很严格。
但是在变形过程中,它们将用来决定二个节点的相对旋转。
局部坐标的方向符合图184.6:
"MPC184销轴单元几何"中定义的惯例。
局部坐标系随着相应的节点一起旋转(如果可能)。
使用命令SECJOINT定义局部坐标系的标识。
施加在销轴链接单元的约束很容易由附着在节点I和J上的二个坐标系(笛卡尔)描述。
(见图184.6:
"MPC184销轴单元几何")。
在任何时刻,施加在销轴单元上的约束如下(图184.6:
"MPC184销轴单元几何")
BR>位移约束
BR>uI = uJ
其中,uI 是节点I的位移矢量,uJ是节点J的位移矢量。
转动约束:
如果销轴 和 在分析开始时不一致,二者的角度始终固定在初始值上。
节点I与节点J的局部坐标系相对位置用第一Bryant (或Cardan)角表示,公式如下:
二个局部坐标系间相对角度变化由下式表示:
ur = φ - φ0 + mπ
其中,φ0 为二个局部坐标系初始偏移角(在参考构形中测量的第一Bryant角(或Cardan角)) ,m 为一个整数,为绕旋转轴转动的圈数。
本构矩阵计算中使用如下的链接转动定义:
其中:
是参考角度“angle1”,由命令SECDATA定义。
如果没有定义,由φ0 代替 。
该单元目前不支持生死选项。
MPC184销轴单元输入数据概述总结了单元输入。
MPC184销轴单元输出数据提供单元输出的总体描述。
万向联轴器单元
图184.7:
"
 升级会员
升级会员 