ROBOGUIDE视觉操作汇总.docx
《ROBOGUIDE视觉操作汇总.docx》由会员分享,可在线阅读,更多相关《ROBOGUIDE视觉操作汇总.docx(18页珍藏版)》请在冰豆网上搜索。
ROBOGUIDE视觉操作汇总
2D视觉系统设置
ROBOGUIDE视觉设置步骤
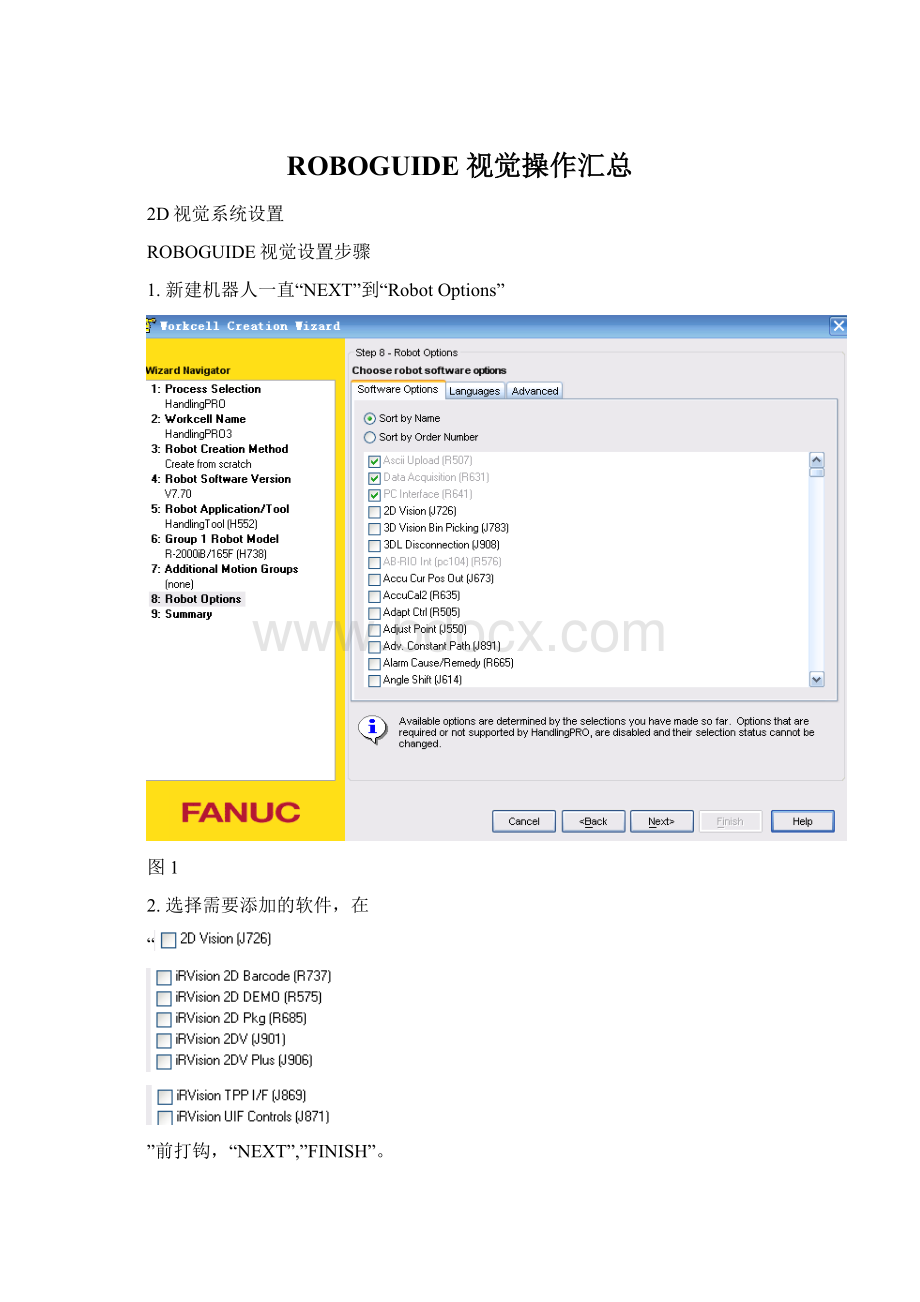
1.新建机器人一直“NEXT”到“RobotOptions”
图1
2.选择需要添加的软件,在
“
”前打钩,“NEXT”,”FINISH”。
3.添加一个“Fixture”作为工作台。
图2
4.设置“TCP”,先给机器人安装一个手抓,
图3
把TCP移动到手抓顶部。
图4
5.在“Fixture”中添加“视觉校正板”,选用“
”。
并调整合适的位置。
图5
6.接下来安装相机,在“CellBrowser”中右击“
”添加“2Dcamera”,选择“
”,双击相机,单击“Calibration,UserFrame”选UF2,在“View”中单击“CameraView”,并调整相机的位置,使视觉校正板占满整个相机视域,这样视觉精度较高。
如图所示。
图6
7.相机与机器人进行连接,在“CellBrowser”中双击“
”,把相机连接在“Port1”上,“UserFrame”选UF1,“OK”。
图7
8.接下来设置两个用户坐标,打开TP,点击“Menu---SETUP---TYPE---Frames”,“OTHER---UserFrame---DETAIL”,Uframe1采用三点法,Uframe2采用四点法。
开始示教坐标。
图8
视觉校正板中心三个大点的方向是X方向,两个大点的方向是Y方向。
那么两个用户坐标的原点在如图视觉校正板左下角小圆的圆心上。
放大左下角的小圆如图
图9
继续放大中心突起的部分,使其占满整个屏幕。
图10
按住“Ctrl+Alt”单击上图中圆心,机器人的TCP就到达点击的位置。
在Uframe1和Uframe2中把这点record成原点。
同样的方法record“x,y方向”和“Uframe2中的systemorigin”,x方向示教的点位于图8所示的右下角小圆的圆心上,y方向示教的点位于图8所示的左上角小圆的圆心上,“systemorigin”位于图8所示的四个大圆中的左下角大圆的圆心上。
坐标设置完后,机器人回到初始位置,并且禁止移动视觉校正板。
9.视觉设置
1)“Robot——WebBrowser——VisionSetup——CameraSetupTools——新建”,
图11
2)单击下图中的拍照,显示出视觉校正板,“Save——Close”。
图12
3)单击“CameraCalibrationTools”,新建如下图。
图13
4)如图14,“Camera”选图11新建的“CA”,“Gridspacing”改为30mm,“ApplicationFrame”选1,“CalibrationGridFrame”选2,“OverrideFocalDistance”改为yes,“FocalDist”为12mm。
单击“SetFrame”和“Find”,出现下图,
图14
5)点击OK,出现下图,如果中间四个大圆中出现红线,调整相机位置重复上一步,直到大圆没有红线为止。
完之后禁止调整相机。
图15
6)单击“points,Err”使坏的点从大到小排列,把偏差大的点delete,如下图中0.8以上的点,“Save——Close”。
图16
7)单击“VisionProcessTools”,新建如下图。
图17
10)单击“CameraCalibration”选步骤3)新建的“CA1”。
移走视觉校正板,添加一个方块在工作台上来示教,使方块在相机的视域内。
图18
8)为了增加视觉的精度,添加一个light。
并且打开光源。
图19
9)单击“VisionProcessTools”。
图17
10)单击“GPMLocatedTool1,Orientation”分别改为-90和90,单击“TeachPattern”,OK。
出现下图。
“SnapandFind——Save”。
图20
11)单击“2-DSingal-ViewVisionProcess”,“PartZHeight”设置为90mm。
“SnapandFind,
,Save,Close”。
图21
10.编程
1)新建程序来示教点。
分别示教方块的四个角,并记录为四个点P[1]P[2]P[3]P[4]。
在这四个点之前插入以下程序。
同时为这四个点添加偏移量。
2)在整个程序的首位加个机器人初始位置的点,使机器人没有挡住相机的视线,初始位置没有偏移量,编程结束。
随意改变方块的位置,只要方块不出相机的视域区,不改变方块Z的大小,机器人都能找到这四个点。
 升级会员
升级会员 