相控阵天线的基础理论.docx
《相控阵天线的基础理论.docx》由会员分享,可在线阅读,更多相关《相控阵天线的基础理论.docx(13页珍藏版)》请在冰豆网上搜索。
相控阵天线的基础理论
第二章相控阵天线的基础理论
相控阵天线是从阵列天线发展起来的,主要依靠相位变化实现天线波束指向在空间的移动或扫描,亦称电子扫描阵列(ESA)天线。
虽然用于相控阵雷达的相控阵天线有多种,但相控阵天线均是由多个天线单元,亦称辐射器构成的。
天线单元可以是单个的波导喇叭天线、偶极子天线、贴片天线等。
在每个天线单元后端都设置有移相器,用来改变单元之间信号的相位关系,信号的幅度变化则通过功率分配/相加网络或者衰减器来实现。
在扫描过程中,整个雷达不需要像采用普通阵列天线或者剖物面天线的雷达那样进行机械运动,因此波束指向迅速灵活,且可以实现多波束并行工作,使得雷达具有很强的自适应能力。
在相控阵天线的实际使用过程中,线性相控阵天线平面相控阵天线是较为常见的两种形式。
下面分别以这两种形式为例,阐述相控阵天线扫描的基本原理。
2.1相控阵天线扫描的基本原理
2.1.1线性相控阵天线扫描的基本原理
线性相控阵天线广泛应用于一维相控扫描的相控阵雷达中。
根据基本的阵列类型,线性相控阵天线可以划分为垂射阵列和端射阵列。
垂射阵列最大辐射方向垂直于阵列轴向,天线波束在线阵法线方向左右两侧进行扫描。
相反,端射阵列主瓣方向沿着阵列轴向。
由于垂射阵应用最为广泛,因此主要讨论垂射阵。
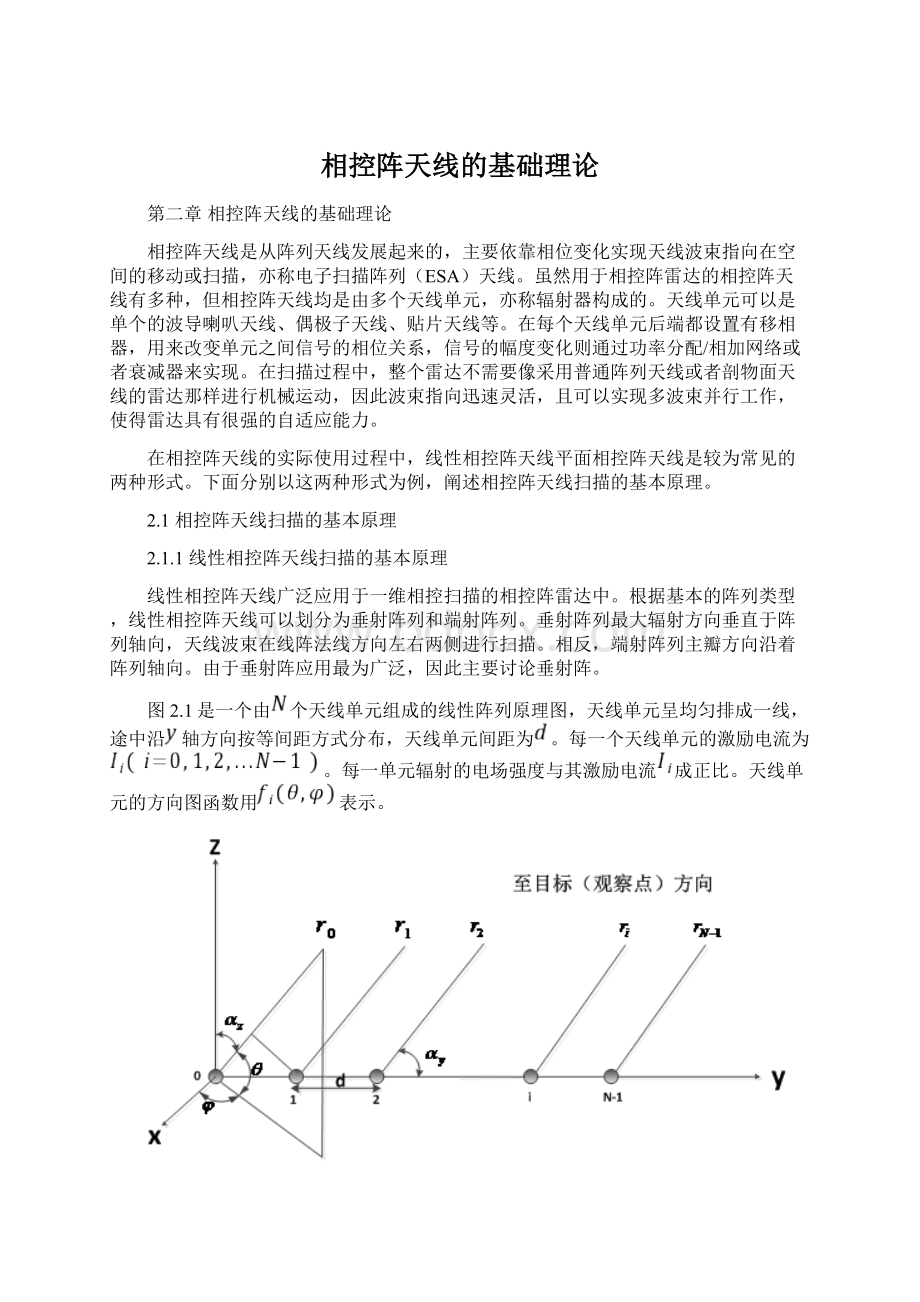
图2.1是一个由个天线单元组成的线性阵列原理图,天线单元呈均匀排成一线,途中沿轴方向按等间距方式分布,天线单元间距为。
每一个天线单元的激励电流为。
每一单元辐射的电场强度与其激励电流成正比。
天线单元的方向图函数用表示。
图2.1单元线性相控天线阵原理图
阵中第个天线单元在远区产生的电场强度为:
(2.1)
式中,为第个天线单元辐射场强的比例常数,为第个天线单元至观察点的距离,为第个天线单元的方向图函数,为第个天线单元的激励电流,可以表示成为:
(2.2)
式中,为幅度加权系数,为等间距线阵中,相邻单元之间的馈电相位差,亦称阵内相移值。
在线性传播媒质中,电磁场方程是线性方程,满足叠加定理的条件。
因此,在远区观察点处的总场强可以认为是线阵中个辐射单元在处辐射场强之和,因此有:
(2.3)
若各单元比例常数,各天线单元方向图相同,则总场强表示为:
(2.4)
假设观察点距离天线阵足够远,则可认为各天线单元到该点的射线互相平行。
根据远场近似:
(2.5)
因为(2.6)
将(2.5)、(2.6)式带入(2.4)式,总场强可进一步简化为:
((2.7)
定义式(2.7)中为阵列因子,则该式说明了天线方向图的一个重要定理——乘法定理。
即阵列天线方向图函数等于天线单元方向图函数与阵列因子的乘积。
为了便于讨论和易于理解线性相控阵天线扫描原理,通常将图2.1简化为图2.2所示情况。
假定天线单元方向图足够宽,满足全向性,在线阵天线波束扫描范围内,可忽略其影响时,线阵天线方向图函数可表示为:
(2.8)
式中,为幅度加权系数,为相邻单元之间的馈电相位差,亦称阵内相移值,且,为天线波束最大指向。
图2.2单元线性相控天线阵简化图
令,它表示相邻单元接收到来自方向信号的相位差,可称为相邻单元之间的空间相位差。
若令,对均匀分布照射函数,,可得:
,由欧拉公式化简得到:
(2.9)
对式(2.9)取绝对值,考虑到实际线阵中单元数目较大,在天线波束指向最大值附近较小。
根据等价无穷小替换,,故得到线阵的幅度方向图函数为:
(2.10)
可见,线性相控阵天线方向图函数是以辛格函数表示的。
由此,可以得到线阵天线的基本性能。
当时,有最大值,。
此时波束指向的表达式为:
(2.11)
由式(2.11)可知,通过改变阵内相邻单元之间的阵内相移值,即可改变天线波束最大值指向。
而是通过每个天线单元后端设置的移相器实现的。
2.1.2平面相控阵天线扫描的基本原理
平面相控阵天线是指天线单元分布在平面上,天线波束在方位与仰角两个方向上均可以进行相控扫描的阵列天线。
目前,大多数远程、超远程相控阵雷达以及新的三坐标相控阵雷达均采用平面相控阵天线。
一个平面相控阵天线可以分解为多个子平面相控阵天线或者分解成多个线阵。
相应的,由发射机至各天线单元的信号功率分配网络与由天线单元到接收机之间的功率相加网络也会随之变化。
平面相控阵天线单元的排列方式主要有两种:
矩形格阵排列和三角形格阵排列,后者可以看成是由两个单元间距较大的按照矩形格阵排列的平面相控阵天线所构成。
图2.3所示为平面相控阵天线示意图,天线阵列位于平面上,共有个天线单元,沿方向的个阵元以间距均匀排列,沿方向的个阵元以间距均匀排列,从而形成矩形栅格阵的平面阵。
图2.3等间距排列的平面相控阵天线示意图
设目标所在方向以方向余弦表示为,则由各天线单元到目标方向之间存在的路程差决定了信号传输过程中的相位差。
因此,沿轴和轴相邻天线单元之间的空间相位差可分别表示为:
(2.12)
第个单元与第个参考单元之间的空间相位差为。
若天线阵内由移相器提供的相邻天线单元之间的阵内相位差,沿轴与轴刻分别表示为:
((2.13)
式中,与分别表示波束最大值指向的方向余弦。
当以球坐标表示时,根据图2.3可知:
(2.14)
第个单元与第个参考单元之间的阵内相位差为。
记,,则,、在此处表示简化的阵内相移值。
设第个天线单元的幅度加权系数为,类似于线阵天线方向图函数的求解过程,在忽略天线单元方向图的影响条件下,平面相控阵天线的方向图函数
可表示为:
(2.15)
考虑到
(2.16)
将(2.16)带入(2.15)中,得到:
(2.17)
通常情况下,天线照射口径函数为等幅分布,即不进行幅度加权,幅度加权系数,满足均匀分布。
此时平面相控阵天线的方向图函数可表示为:
((2.18)
式(2.18)表明,在等幅分布条件下,平面相控阵天线方向图可以看成是两个线阵天线方向图函数的乘积。
其中表示水平方向线阵的天线方向图,是垂直方向线阵的天线方向图。
与线阵方向图的推导类似,这里有:
((2.19)
由(2.19)可以看出,分别改变相邻天线单元之间的相位差、值,即可实现平面相控阵天线波束的扫描,而、值的改变仍然是通过每个天线单元后端设置的移相器实现的。
2.2相控阵天线的基本构成
相控阵天线理论和技术的蓬勃发展,使得相控阵天线在电路设计、结构形式和微波元件及控制方法等方面千差万别[29]。
通常情况下,相控阵天线是由天线阵面、移相器、馈线网络以及相应的控制电路等几部分组成。
如果相控阵天线的馈电网络中不含有源电路,则称此天线为无源相控阵天线。
如果天线的各个单元通道中含有有源器件,例如信号功率放大器、低噪声放大器、混频器等,则称此天线为有源相控阵天线。
2.2.1天线阵面
相控阵天线阵面通常是由几百个到几万个不等的通过相位进行控制的通道激励辐射单元构成。
这些辐射单元可以是单个的波导喇叭天线、偶极子天线、贴片天线等。
当这些辐射单元分布于平面上,称为平面相控阵天线;分布于曲面上,称为曲面相控阵天线;如果该曲面与雷达安装平台外形相一致,则成为共形相控阵天线(conformalphasedarrayantenna)。
相控阵天线单元的排列方式主要有矩形格阵排列、三角形格阵排列以及六角形格阵排列等。
2.2.2馈线网络
相控阵天线是一个多通道系统,一般均包含大量天线单元,在发射机、接收机与天线阵各单元之间必须有一个多路馈线网络。
通过发射机输出端将信号送至天线阵面中各个辐射单元或将天线阵面中各个辐射单元接收到的信号送至接收机输入端的过程,称为馈电,而将为阵列中各个天线单元通道提供实现波束扫描或改变波束形状所要求的相位分布称为馈相。
其中的馈电方式主要包括强制馈电与空间馈电两种,改变波束形状所要求的各通道激励相位是通过微波器件—移相器实现的。
强制馈电(constrainedfeeding)亦成为约束馈电。
该系统采用波导、同轴线、板线、微带线等微波传输线实现功率分配与相加网络。
由于发射激励信号发射机输出信号以及接收机输入信号均只在传输线中传播,辐射泄漏很小,馈电网络的电磁兼容性容易得到保证。
空间馈电亦称光学馈电,主要分为透镜式与反射式两种。
与强制馈电相比较,信号场强在传输过程中不是约束在波导、同轴线或者微带传输线中,而是在自由空间传播,因此空间馈电网络实际上是采用空馈的功率分配/相加网络。
采用空间馈电具有许多优点。
例如,可以省掉许多加工要求严格的高频微波器件,在雷达信号波长较短时,可利用空间馈电形成单脉冲测角所需的和、差多波束,与强制馈电相比具有更为明显的优点。
2.2.3移相器
各种不同类型的移相器是相控阵天线馈线网络实现馈相的关键器件,对它的要求是:
移相的数值精确、性能稳定;宽频带、大功率容量;便于快速控制等[30]。
移相器主要分为以采用压控变容二极管的场效应晶体管(FET)模拟型移相器和以采用PIN二极管作开关器件的通过式数字型移相器两大类。
但是,为了便于计算机对天线波束扫描进行可编程控制,控制电压或者电流信号均是按照二进制方式产生的,移相器的每一位受二进制数字信号中的一位控制。
因此,无论模拟型移相器还是数字型移相器,它们提供的相移量均是按照二进制方式变化的,即仍然是离散的,因而在实际使用中,多采用数字式移相器。
设数字式移相器位数为,为正整数,则移相器的最小相移值为:
(2.20)
故位数字移相器共有种不同移相值,以四位数字移相器为例,如图2.4所示。
最小相移值为,且高一位移相器的相移量是低一位移相器相移量的2倍。
因此,四位数字移相器可以看成是四个相移数值分别为的子移相器串联而成。
每一位子移相器均受到一位二进制数字信号的控制。
其中0对应不移相,1对应移相。
图2.4四位数字式移相器示意图
例如,当控制信号编码为0101时,四位数字式移相器产生的相移量为:
即控制信号编码为0101时,代表移相器提供的相移量。
从理论上讲,当移相器正常工作,不存在故障情况下,四位数字式移相器可提供从0到337.5°范围内,每间隔最小相移值22.5°取一个值,总共可提供种相移值。
为了节省无线电元件和电路、为了简化结构和提高可靠性,大多数现代相控阵天线的移相器控制都是以行—列原理为基础。
移相器的控制电路可分为两种主要类别。
第一类允许独立控制移相器的所有电路,即此种电路内的每一个移相器可以处于任何一种状态而与其余移相器的状态无关。
第二类不允许在个别移相器组内(有时甚至是全部)实现独立控制的电路。
在此种情况下,移相器控制码由行和列二进制码的和组成(带进位),移相器位于行和列的交点上。
有种状态的移相器,在通常情况下,它的状态按沿行和列传送的数之和(按模)计算,也就是。
这样的电路确保同时控制所有的移相器和形成使相控阵天线波束指向任意方向所必需的相位波前。
第二类电路比第一类电路速度快,但控制的灵活性较小。
2.3相控阵天线可能的故障类型及影响分析
2.3.1故障类型
相控阵天线经常产生的故障是指移相器控制电路的故障[30],由于该故障使得移相器或者移相器组的一位或者几位未接通。
此外,在有源相控阵天线中,由于通道放大器工作异常,导致辐射器没有激励也是典型故障形式之一。
以常见的二进制原理构成的移相器情况为例,来讨论相控阵天线可能的故障类型及其对天线性能的影响。
位二进制数字式移相器通常是由个移相数值不同的离散位(亦称子移相器)串联构成。
每一个离散位都包含两种状态,选通和未选通,对应的传输系数有两个值:
以及,其中。
设相控阵天线含有个移相器,移相器状态总数为。
常见的故障类型有两类:
一是无激励故障,此时通道激励复振幅。
二是离散位失效故障,此时。
以三位二进制数字移相器为例,此时移相器可能的故障类型见图2.5所示。
图2.5三位二进制数字移相器的可能故障类型
2.3.2影响分析
故障模式的差异性对相控阵天线的特性参数影响不同。
研究故障模式对
 升级会员
升级会员 