三相零式整流的直流电机调速系统设计及仿真.docx
《三相零式整流的直流电机调速系统设计及仿真.docx》由会员分享,可在线阅读,更多相关《三相零式整流的直流电机调速系统设计及仿真.docx(10页珍藏版)》请在冰豆网上搜索。
三相零式整流的直流电机调速系统设计及仿真
第一章双闭环直流调速系统的工作原理
1.1双闭环直流调速系统的介绍
双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
它具有动态响应快、抗干扰能力强的优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止负反馈环节是专门用来控制电流的。
但它只是在超过临界电流
值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
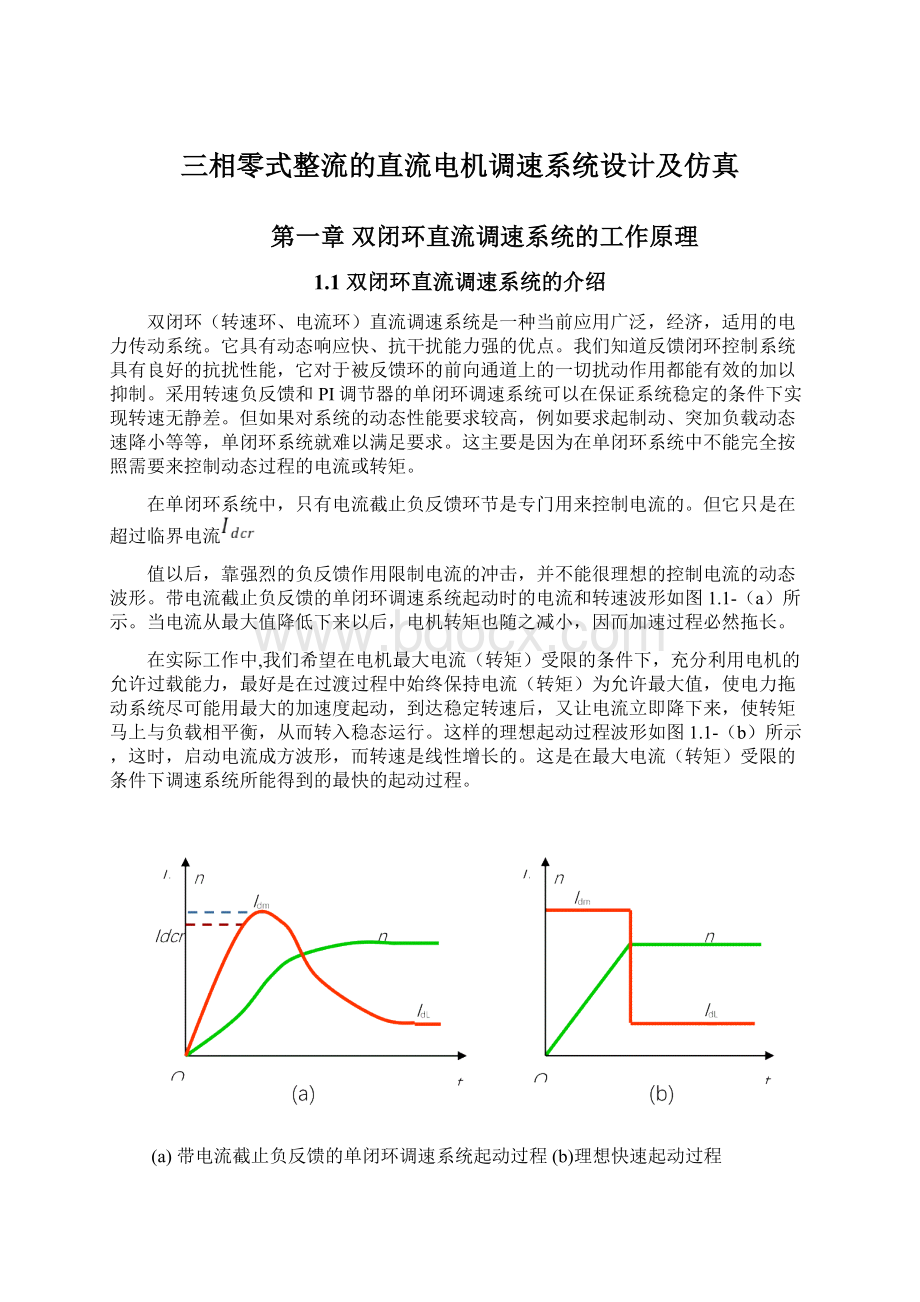
带电流截止负反馈的单闭环调速系统起动时的电流和转速波形如图1.1-(a)所示。
当电流从最大值降低下来以后,电机转矩也随之减小,因而加速过程必然拖长。
在实际工作中,我们希望在电机最大电流(转矩)受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度起动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形如图1.1-(b)所示,这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流(转矩)受限的条件下调速系统所能得到的最快的起动过程。
(a)带电流截止负反馈的单闭环调速系统起动过程(b)理想快速起动过程
图1.1调速系统起动过程的电流和转速波形
实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值
的恒流过程,按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么采用电流负反馈就能得到近似的恒流过程。
问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不再靠电流负反馈发挥主作用,因此我们采用双闭环调速系统。
这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。
1.2双闭环直流调速系统的组成
为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串级连接,如图1.2所示,即把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。
从闭环结构上看,电流调节环在里面,叫做内环;转速环在外面,叫做外环。
这样就形成了转速、电流双闭环调速系统。
该双闭环调速系统的两个调节器ASR和ACR一般都采用PI调节器。
因为PI调节器作为校正装置既可以保证系统的稳态精度,使系统在稳态运行时得到无静差调速,又能提高系统的稳定性;作为控制器时又能兼顾快速响应和消除静差两方面的要求。
一般的调速系统要求以稳和准为主,采用PI调节器便能保证系统获得良好的静态和动态性能。
图1.2转速、电流双闭环直流调速系统
图中:
U*n、Un—转速给定电压和转速反馈电压U*i、Ui—电流给定电压和电流反馈电压
ASR—转速调节器ACR—电流调节器TG—测速发电机TA—电流互感器
UPE—电力电子变换器
1.3双闭环直流调速系统的稳太结构图和静特性
首先要画出双闭环直流系统的稳态结构图如图1.3所示,分析双闭环调速系统静特性的关键是掌握PI调节器的稳太特征。
一般存在两种状况:
饱和——输出达到限幅值;不饱和——输出未达到限幅值。
当调节器饱和时,输出为恒值,输入量的变化不再影响输出,相当与使该调节环开环。
当调节器不饱和时,PI作用使输入偏差电压
在稳太时总是为零。
图1.3双闭环直流系统的稳态结构图
实际上,在正常运行时,电流调节器是不会达到饱和状态的。
因此,对静特性来说,只有转速调节器饱和与不饱和两种情况。
1.4双闭环直流调速系统的数学模型
双闭环控制系统数学模型的主要形式仍然是以传递函数或零极点模型为基础的系统动态结构图。
双闭环直流调速系统的动态结构框图如图1.4所示。
图中
和
分别表示转速调节器和电流调节器的传递函数。
为了引出电流反馈,在电动机的动态结构框图中必须把电枢电流
显露出来。
图1.4双闭环直流调速系统的动态结构框图
1.5双闭环直流调速系统两个调节器的作用
1)转速调节器的作用
使转速n跟随给定电压
变化,当偏差电压为零时,实现稳态无静差;
对负载变化起抗扰作用;
其输出限幅值决定允许的最大电流。
2)电流调节器的作用
在转速调节过程中,使电流跟随其给定电压
变化;
对电网电压波动起及时抗扰作用;
起动时保证获得允许的最大电流,使系统获得最大加速度起动;
当电机过载甚至于堵转时,限制电枢电流的最大值,从而起大快速的安全保护作用。
当故障消失时,系统能够自动恢复正常。
1.6三相零式可控整流电路
本次课程设计所用的三相零式可控整流电路又名三相半波可控整流,其电路图如图1.5所示。
为得到零线,变压器二次侧必须接成星形,而一次侧接成三角形,避免3次谐波电流流人电网。
三个晶闸管分别接入a、b、c三相电源,它们的阴极连接在一起,称为共阴极接法,这种接法触发电路有公共端,连线方便。
图1.5三相零式可控整流电路
三相半波整流带阻感负载的移相范围为0-90度,当电感很大时,整流电流
的波波形基本是平直的,流过晶阐管的电流接近矩形。
第二章转速、电流双闭环直流调速系统——调节器设计
2.1电流调节器设计
根据计算得出下图2.1所示参数数值并验证。
图2.1含给定滤波与反馈滤波的PI型电流调节器
2.2转速调节器设计
根据计算得出下图2.1所示参数数值并验证。
图2.2含给定滤波与反馈滤波的PI型转速调节器
第三章MATLAB软件仿真
3.1仿真软件介绍
利用MATLAB下的SIMULINK软件和电力系统模块库(SimPowerSystems)进行系统仿真是十分简单和直观的,用户可以用图形化的方法直接建立起仿真系统的模型,并通过SIMULINK环境中的菜单直接启动系统的仿真过程,同时将结果在示波器上显示出来。
掌握了强大的SIMULINK工具后,会大大增强用户系统仿真的能力。
在工程设计时,首先根据典型I型系统或典型Ⅱ型系统的方法计算调节器参数,然后利用MATLAB下的SIMULINK软件进行仿真,灵活修正调节器参数,直至得到满意的结果。
也可用MATLAB仿真软件包的设计工具箱设计其它各种控制规律的调节器,鉴于篇幅不一一展开。
3.2仿真设计
设计后的数学模型结构图如下图3.1:
图3.1数学模型结构图
由于本文只进行了理论性设计,故在系统安装与调试阶段只对控制电路部分进行了MATLAB仿真,以分析直流电机的启动特性。
采用MATLAB中的simulink工具箱对系统在阶跃输入和负载扰动情况下的动态响应(主要为转速和电枢电流)进行仿真。
仿真可采用面向传递函数的仿真方法或面向电气系统原理结构图的仿真方法,本文采用面向传递函数的仿真方法。
根据设计结果修改gaingain1stepstep1。
3.3仿真后波形
图3.2仿真后转速电流波形
3.4仿真结果分析
在图3.2中,图上部为电机转速曲线,下部为电机电流曲线。
加电流启动时电流环将电机速度提高,并且保持为最大电流,而此时速度环则不起作用,使转速随时间线性变化,上升到饱和状态。
进入稳态运行后,转速换起主要作用,保持转速的稳定。
1.电机转速曲线
在电流上升阶段,由于电动机机械惯性较大,不能立即启动。
此时转速调节器ASR饱和,电流调节器ACR起主要作用。
转速一直上升。
当到达恒流升速阶段时,ASR一直处于饱和状态,转速负反馈不起调节作用,转速环相当于开环状态,系统为恒值电流调节系统,因此,系统的加速度为恒值,电动机转速呈线性增长直至给定转速。
使系统在最短时间内完成启动。
当转速上升到额定转速时,ASR的输入偏差为0,但其输出由于积分作用仍然保持限幅值,这时电流也保持为最大值,导致转速继续上升,出现转速超调。
转速超调后,
极性发生了变化,
,则ASR推出饱和。
其输出电压立即从限幅值下降,主电流也随之下降。
此后,电动机在负载的阻力作用下减速,转速在出现一些小的振荡后很快趋于稳定。
当突加给定负载时,由于负载加大,因此转速有所下降,此时经过ASR和ACR的调节作用后,转速又恢复为先前的给定值,反映了系统的抗负载能力很强。
2.电机电流曲线
直流电机刚启动时,由于电动机机械惯性较大,不能立即启动。
此时转速调节器ASR饱和,达到限幅值,迫使电流急速上升。
当电流值达到限幅电流时,由于电流调节器ACR的作用使电流不再增加。
当负载突然增大时,由于转速下降,此时转速调节器ASR起主要的调节作用,因此,电流调节器ACR电流有所下降,同启动时一样,当转速调节器ASR饱和,达到限幅值,使电流急速上升。
但是由于电流值达到限幅电流时,电流调节器ACR的作用使电流不再增加。
当扰动取电以后,电流调节器ACR电流又有所增加,此后,电动机在负载的阻力作用下减速,电流也在出现一些小的振荡后很快趋于稳定。
第四章心得体会
通过本次课程设计,我对电力拖动自动控制系统在工业中的运用有了更多的认识,对三相零式整流的直流电机双闭环调速系统的电路的原理及组成有了一定的了解,并运用工程设计方法对电流环和转速环进行结构和参数的设计。
在设计完成后进行仿真,我们利用MATLAB仿真,把电路连好设定好参数就可以进入参数调试,仿真。
调试的主要任务是排除系统的故障和错误。
调试阶段,找出硬件、参数间不相匹配和有错的地方,反复修改,直到符合设计要求。
本次设计的时间比较仓促,但我在朱群峰老师的指导下和同学们得帮助下,克服了很多困难圆满完成这次设计。
通过这个设计我同时也体会到了团队合作的乐趣。
但是,通过设计我也明白一点,我们上课所学到的知识在做本设计时是远远的不够的,只是设计的一点皮毛而已。
平常我们应该扩大自己得知识面。
参考文献
[1]王兆安,等.电力电子技术[M].北京:
机械工业出版社,2000.
[2]张广溢,等.电机学[M].重庆:
重庆大学出版社,2002.
[3]王军.自动控制原理[M].重庆:
重庆大学出版社,2008.
[4]导向科技.ProtelDXP电子电路设计培训教程[M].北京:
人民邮电大学出版社,2003.
[5]周渊深.交直流调速系统与Matlab仿真[M].北京:
中国电力出版社,2004.
[6]陈伯时.电力拖动自动控制系统—运动控制系统(第3版)[M].北京:
机械工业出版社,
2005.
本文来自网络,版权归原作者所有,请下载后,尽快删除。
 升级会员
升级会员 