驾驶员特性总结.docx
《驾驶员特性总结.docx》由会员分享,可在线阅读,更多相关《驾驶员特性总结.docx(14页珍藏版)》请在冰豆网上搜索。
驾驶员特性总结
1.驾驶员行为简介
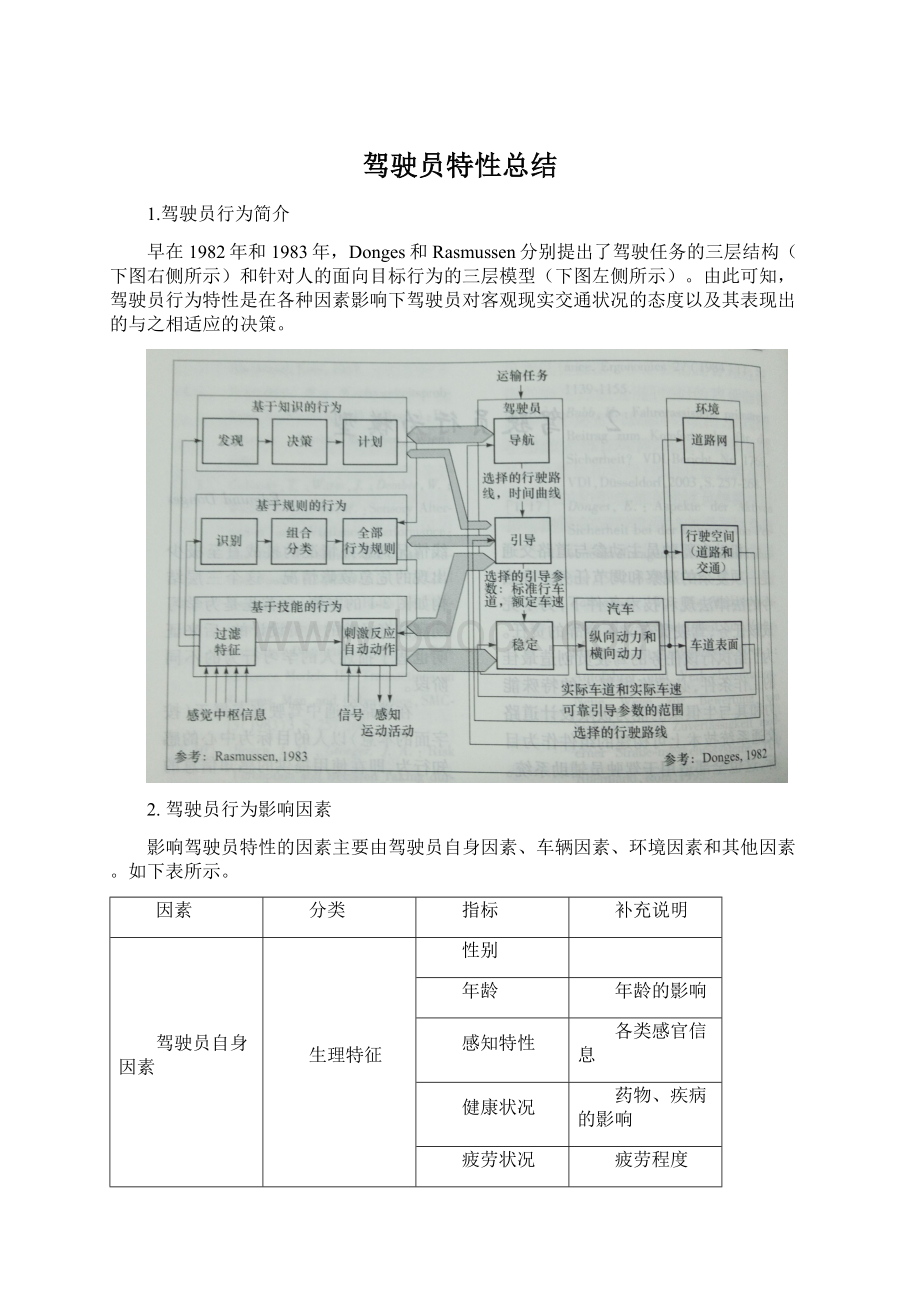
早在1982年和1983年,Donges和Rasmussen分别提出了驾驶任务的三层结构(下图右侧所示)和针对人的面向目标行为的三层模型(下图左侧所示)。
由此可知,驾驶员行为特性是在各种因素影响下驾驶员对客观现实交通状况的态度以及其表现出的与之相适应的决策。
2.驾驶员行为影响因素
影响驾驶员特性的因素主要由驾驶员自身因素、车辆因素、环境因素和其他因素。
如下表所示。
因素
分类
指标
补充说明
驾驶员自身因素
生理特征
性别
年龄
年龄的影响
感知特性
各类感官信息
健康状况
药物、疾病的影响
疲劳状况
疲劳程度
心理特征
能力
感知、注意力、对距离速度判断能力、风险认知能力、驾驶动作反应能力、灵活性、协调性等
气质
即人的脾气、秉性。
影响心理活动的速度、强度和指向性
性格
影响反应决策和动机即对道路情况的判断和处理
情绪
影响认知操作的效果
意志
驾驶员积极的意志品质包括自觉性、果断性、坚持性和自制性
车辆因素
车辆属性
种类、长度、宽度等
车辆性能
动力性、舒适性、经济性、通过性安全性等
车辆设施
操作杆、仪表盘、转向盘、后视镜、脚踏板等
环境因素
车内环境
热环境
温度、湿度、气流速等
声环境
声压、频率、声强等
光环境
色度、照度等
空气品质
二氧化碳含量、新风量等
车外环境
道路状况
道路等级及类别、路段特征、道路线型、交通设施、交通标志等
天气状况
晴朗、雾天、雨天、雪天等
交通干扰
信号灯、交通标志、侧向净空、街道化程度等
交通密度
交通态势
其他因素
出行任务
任务缓急
3.驾驶员行为表征
这些因素导致的驾驶员特性主要表现在以下几个方面。
特征类别
具体特征
驾驶员
心理期望特征
期望速度
期望加速度
期望间距
生理信号特征
血压
汗液
皮肤电压
肌电
生理反应特征
表情
姿态
手势
眼睛闭合
操作特性
油门踏板开度及变化率
刹车踏板力度
方向盘握力及转角
车
行车状态特征
速度、加速度
行车间距
插车间隙
4.测试要素
从实车测试角度对驾驶员特性进行分析需要考虑以下几个方面的问题。
4.1交通场景
场景
分类及路段特征
道路
高速场景
高速直道、弯道、高速匝道(高速入口)、高速隧道等
城市场景
城市郊区
直道、弯道、坡道以及相应的组合道路;
不同的车道数:
双车道、三车道等;
不同类型弯道:
不同半径、不同弯道转角、不同朝向等;
不同道路路面:
沥青、水泥、破损等;
交叉路口:
有信号灯的交叉路口、无信号交叉路口等;
城市市区
居民区;
交叉路口:
有信号灯和无信号灯、丁字路口和十字路口;
不同交通流情景:
畅通、轻微拥堵、拥堵;
不同道路类型:
直道、弯道;
乡村
直道、弯道、坡道以及相应的组合道路;
不同弯道半径、弯道转角、朝向;
交叉路口:
十字交叉路口、丁字交叉路口等;
天气及日照
日间、夜间驾驶
天气状况
晴天、雨天、雾天等
4.2驾驶场景
驾驶情景
情景分类
驾驶操作行为
跟车驾驶情景
同道跟车场景
邻道跟车场景
加速行为、制动行为、车速保持/跟驰行为
换道驾驶情景
超车场景
变道场景
切入场景
正常换道
紧急换道
左换道
右换道
车道保持情景
自由行驶场景
加速行为、制动行为、速度保持行为
4.3驾驶员类型
驾驶员类型
表现
激进/外向
活泼、好动、敏感、易产生冒险动机、反应比较迅速、动作敏捷、精力充沛、注意力容易转移、易于高速行车和超车、会车时不减速、交叉路口不瞭望、有时浮躁、不细心观察、对复杂情况可能轻率处理等
稳健/中等
机敏、经历丰富、性情安静、感情不外露、严守交通规则、起步与刹车平稳、观察周到、紧跟前车不轻易超车、不爱开快车、遇复杂交通情况深思熟虑、比较镇静、自制力强、不易违章
谨慎/内向
沉稳、慎重、注意力稳定且不易转移、善于忍耐、反应较迟钝、情绪不易外漏、行动迟缓、对外界刺激敏感体验不深、不易产生冒险动机、易低速行车且较少超车、处理紧急情况谨慎小心、优柔寡断、一旦发生交通事故易惊慌失措
4.4评价指标
4.4.1从驾驶行为方面分类的评价指标
驾驶行为
评价指标
速度控制行为
加速行为(猛加速、缓加速、加速次数)、车速离散程度、超速、制动行为(急制动、缓制动)、换档频率、空档滑行比率(坡道)等
换道行为
换道频繁状况、换道时方向盘使用、换道时车间距、换道时间长短等
跟车行为
跟车时距、跟车间距、引导车对视野的遮挡情况、车速离散程度、车距变化率等
4.4.2从操作行为方面分类的评价指标
驾驶行为
评价指标
加速行为
油门踏板开度、油门踏板速度和行驶车速
制动行为
制动踏板开度及其变化率、最大制动踏板开度、制动踏板速度、与前车的相对距离、相对速度、纵向车速、TTC、TTC等
变道(转向)
行为
转向盘转角、侧向速度、侧向加速度、横摆角速度、横向偏距、方向盘角速度、方向盘转角标准差、平均车速、转向灯使用频率、转向灯合理性指标(转向灯使用次数/变更车道次数)、变道时间等
4.4.3从指标特性方面分类
分类
指标
速度类
瞬时速度、速度均值、速度标准差、行程平均速度、速度极值、加速度均值、加速度标准差、平均加速度、加速度极值、油门踏板角度均值、标准差、极值等
方向类
车头方位、车头偏离角度和方向盘转角等
时间类
事件检测时间、认知反应时间、事件响应时间、操作执行时间、任务持续时长等
距离类
车道偏距标准差、与黄线偏距标准差、车头/车尾间距均值、标准差和极值、车头/车尾时距均值、标准差和极值、任务总路程、与障碍物的距离最小值、驶出车道距离最大值等
决策类
可接受间隙、转弯半径、信号灯决策、避撞方式选择等
结果类
碰撞次数、压线次数、驶出车道次数、换道次数、超车次数等
5.文献综述
5.1国外驾驶员行为研究综述
5.1.1驾驶风格与驾驶员行为综述
Quintero基于BP神经网络建立了两个驾驶员行为分类模型一个模型将驾驶员分为激进型和稳健型并且识别道路的潜在危险路段,另一个用来辨识驾驶员状态(如瞌睡或酒后驾驶),通过参数:
车辆位置,纵向车速,转向盘转角,偏航角输入,并且综合分析道路/车道偏离、超速行驶、不足转向、不适当的制动或者加速,来进行驾驶员的分类。
Miyajima从油门及制动踏板的操纵信号中提取出驾驶员加速或者减速时的特征,并通过频谱分析得到每个驾驶员的频谱特征,对驾驶员行为建立了高斯混合模型。
一些学者考虑到不同的工况,指出应用三种方法建立实时的驾驶员行为辨识模型。
第一种方法:
考虑驾驶员长期的纵向驾驶行为,采用异常检测的方法,通过分析驾驶员操纵制动踏板或油门踏板的动作从而将驾驶员分为谨慎型和激进型。
第二种方法:
使用跟车工况下驾驶员的操纵动作(油门踏板信号和制动踏板信号)与前后两车的相对状态,基于模糊控制算法将驾驶员的行为分为谨慎型、比较激进型和激进型。
第三种方法:
利用本车的行驶状态与前后两车的相对状态,分析驾驶员的控制行为,从而辨识驾驶员在跟车工况下的驾驶行为特点(谨慎型和激进型)。
5.1.2心理状况和驾驶员行为综述
夏威夷大学心理学教授博士从社会心理学领域研究驾驶人情感、认知和感知运动,结果显示了驾驶行为受到驾驶人心理状况影响,包括情绪的不安,认知偏差或不合理,感知运动的不协调,感情冲动以及不适当的言语表现。
Chian等人研究了驾驶员在熟悉道路和不熟悉道路情形下驾驶员特性,通过测量驾驶速度和越过车道线次数,对比分析得出,在越过车道线次数方面,对道路熟悉状况没有影响,而在车速方面,在不熟悉的环境中,车速稍微略低。
此外,还有一些学者从驾驶任务困难程度(有无车道线、道路宽度等)、周围环境温度是否舒适等方面分析驾驶员压力对驾驶行为的影响。
通过车辆速度、车辆行驶位置、方向转角等参数,定量分析与驾驶行为内在联系。
5.1.3交通场景下的驾驶行为综述
在有信号灯的交叉路口,许多研究多集中在驾驶员的停车时间/反应上,而ThomasF.Fugger、Jr.、JesseL.Wobrock、BryanC.Randles着重研究信号灯变绿时,驾驶员起步的反应时间和加速变化率。
在无信号等交叉路口,KeiSatoandMasaoNagai重点分析了该情景下的驾驶行为,并研究分析车速与车辆距车辆停止线距离之间的联系,注视角度与车辆距车辆停止线距离之间的联系,车速、距交叉路口距离、注视角度三者之间的联系以车速与注视角度随着到停止线时间变化的状况。
最后揭示在无信号交叉路口,驾驶员趋向性操作行为。
在针对驾驶员行为分析时,AmardeepSathyanarayana、Nitish、Krishnamurthy、JohnH.L.Hansen指出应该充分利用车辆行驶距离去分析驾驶行为,不仅仅利用时间进行分析。
通过分析车辆速度随着距离变化情况、方向盘转角随距离变化情况,点明在高速情景、快速换道等情况下,利用距离进行分析驾驶行为更具有优势。
一些学者还对以下情形进行研究分析:
交叉路口,黄灯亮起期间,研究驾驶员行为特性;高速道路上,在施工区域内,车道合并时,对驾驶员行为特性进行研究。
NobuyukiKuge等人基于HMM使用两种不同但互补的方法对驾驶员行为进行建模,建立了包含三种辨识类别的HMM——紧急变道,正常变道,保持车道。
5.1.4特定情形下的驾驶行为综述
JeffK.Caird等人综合分析目前关于手机对驾驶行为影响,结果表明任何形式的手机通话都会造成反应能力的下降,与不打手机相比,反应时间的均值增加了0.25秒;而驾驶人在手机通话过程中,并没有因为其影响而降低车速和保持较大的车头间距。
美国RhodeIsland大学利用安装在头部的眼睛追踪装置HED,记录了驾驶人在完成各种驾驶任务过程中的眼动行为,分析了操作车内收音机、接电话、观看后视镜、读里程表等行为对驾驶人注意力分散的影响。
JohnD.Bullough、JohnVanDerlofske等人分析夜间驾驶时,相向而来车辆的灯光强度对驾驶员行为造成的影响。
并且对光照强度和车速随时间的变化情况进行了对比分析,对光照强度和车辆位置变化之间关系进行了相关研究。
JohnGaspar、TimothyBrown、ChrisSchwarz等人对前撞情景和弯道车道偏离情景中驾驶员行为进行相关分析,指出在前撞情形中,驾驶员的操作行为一般分为四种:
仅是制动、仅是转向、先转向后制动、先制动后转向,并通过反应时间和MATTCl参数指标分析了集中注意力驾驶和分心驾驶两种驾驶状态下不同的驾驶行为操作。
此外,针对弯道偏离情况,分析了反应时间和入弯时车速对驾驶行为的影响。
5.1.5驾驶员测试评价研究综述
HongyangZhao等人开发了一个以智能手机为基础的驾驶行为评价系统,由两部分组成:
驾驶事件检测评估部分和乘坐舒适度评估部分。
在驾驶事件的检测和评估的一部分,该系统加FIRST驱动,基于智能手机接收的加速度的数据、定位和GPS传感器数据提出了一个模型来检测驾驶员的驾驶事件。
然后乘坐舒适度评估部分通过收集车辆在行驶时智能手机传感器数据,加入驾驶员的驾驶事件、车辆的振动和定量感官分数。
GermanCastignani采用了GPS、加速度计传感器、磁力计传感器、重力传感器等设备收集了20辆装有安卓系统的汽车数据,并从总加速度、线性加速度、超速度以及转向率等4个方面对驾驶行为进行分析。
ThomasJ.Daunl等人为了研究重型车用节能辅助系统中驾驶员的行为特性和系统的节能潜力,采用驾驶模拟器,根据建议设计了四条长度约20公里的线路,其中包含大约25%的高速公路,70%的农村和5%的城镇道路。
并招募了41个持有重型商用车驾驶执照的志愿者进行四条路线的模拟驾驶测试。
K.S.Nesamania等人在前有基础上提出14个驾驶参数用来分析驾驶特征,如下:
平均车速V1(km/h);平均行驶车速V2(km/h)(除了怠速外的);最大车速Vmax(km/h);平均加速度Acc(m/s2);平均减速度Dec(m/s2);最大加速度Accmax(m/s2);最大减速度Decmax(m/s2);怠速时间占比Pi(%)(车速为0);加速工况时间占比Pa(%)(v>5km/h,a>0.1m2/s);减速工况时间占比Pd(%)(v>5km/h,a<-0.1m2/s);缓行工况时间占比Pcr(%)(v<5km/h,a<0.1m2/s);巡航工况时间占比Pc(%)(v>5km/h,|a|<0.1m2/s);正动能PKE(攻击性的指标);No.of(stops/km)(每公里的停车次)。
YaqinQIN等人采用12个参数被用于线性回归分析,和问卷调查一起评价超车过程驾驶行为:
超车时加速度;超车时速度;超车时减速度;准备换道时车速;超车持续时间;超车的平均加速度;超车过程行驶距离;超车的平均车速;超车结束时本车与超车车道前方车辆的车距;超车结束时本车与超车车道后方车辆的车距;超车开始时本车与超车车道前方车辆的车距;超车开始时本车与超车车道后方车辆的车距。
5.2国内驾驶员行为研究综述
5.2.1驾驶风格与驾驶员行为
吉林大学宗长富教授提出基于隐马尔科夫模型和人工神经网络建立联合模型,对直线行驶工况、正常转向工况和紧急转向工况下驾驶员的操作进行准确的驾驶意图辨识和较为精确的驾驶行为预测。
吉林大学王畅建立了用于驾驶员驾驶意图辨识的双层隐马尔科夫模型。
其中模型下层为三个表征短时间驾驶员行为的MGHMM模型库,辨识驾驶员操纵行为,如快速踩下制动踏板、正常松开制动踏板、踏板无动作、紧急转向、正常转向等,模型上层为表征长时间段的驾驶员意图的MDHMM,辨识驾驶员驾驶意图,包括弯道制动、紧急制动、正常制动、紧急避障和破路起步。
上层利用下层的辨识结果,选取似然度最大的模型作为当前的驾驶员驾驶意图。
其中模型输入参数类型:
加速踏板位置、制动踏板的位置;方向盘转角、方向盘角速度;速度。
同济大学陈慧教授基于高斯混合隐形马尔科夫模型(GM-HMM)对驾驶员在高速公路上的超车行为进行了辨识。
首先通过驾驶模拟器试验采集转向盘转角、侧向速度、侧向加速度、横摆角速度和横向偏距,然后训练GM-HMM模型,得到保持车道(LK)、左换道(LCL)和右换道(LCR)三个驾驶员模型,以辨识驾驶员的行为,并且对进行不安全超车行为的驾驶员给予提醒或者加以修正,提高驾驶员的超车安全。
吉林大学林娜对驾驶员的各操纵行为的特性进行分类,如针对驾驶员的转向行为、制动行为、加速行为分别进行特性研宄,并设计了相应的试验工况:
制动试验工况,接近静止前车工况、接近低速前车工况、接近减速前车工况;加速试验工况,起步加速、超车加速、跟车工况和坡路行车。
曲婷基于随机模型预测控制方法,对驾驶员操纵车辆的转向和跟车行为及技能进行数学建模。
利用利用车辆动力学仿真软件VEDYNA、红旗HQ430实车测试数据及NGSIM数据(美国高速公路管理局TheNextGenerationSimulation计划),通过多样不同工况下的仿真研究与模型预测控制方法的比较及与实车测试数据的对比,验证本论文提出的建模方法的有效性,最后对基于现场可编程门列阵(FieldProgrammableGateArray,简记FPGA)的驾驶员转向行为建模方法的实时实现进行了初步探索。
5.2.2交通场景下的驾驶行为综述
在城市道路中,交叉口处机动车、行人、非机动车最为集中。
邢岩、曲昭伟等人从交叉口处机动车驾驶员的驾驶心理角度入手,分析交叉口处客体对目标车辆驾驶员驾驶心理的影响,从而研究机动车驾驶员驾驶行为。
哈尔滨工业大学漆巍巍等人针对城市道路中不良汇入和不良变道的驾驶行为进行了分析。
依据匝道车辆不良汇入前的速度和匝道速度的变化过程将不良汇入驾驶行为分为直接型、缓冲型和等待型3种类型,并选取行为车辆(汇入角度、汇入速度和渐变距离)、被行为车辆(车辆类型、车辆速度和车头时距)、匝道(车道数、坡度和曲线半径)、主干道路(车道数、坡度和加速车道长度)、主路车流(车流量、车流速度和车头时距)、匝道车流(车流量、车流速度和车头时距)作为具体参数指标进行不良汇入行为的判定;对不同操作下不良变道驾驶行为导致的交通冲突数和交通冲突程度不同将不良变道驾驶行为分为斜插型、挤压型和并行型,并选取车辆角度分有行为车辆(车辆速度、车辆类型和加减速特性)、原始车道紧随车辆(车辆类型、车辆速度和车头时距)和目标车道紧随车辆(车辆类型、车辆速度和车头时距),从道路的角度分为车道数、车道宽度和坡度,从交通流参数角度有车流量、车流密度和车流速度做不良变道行为具体的评定指标。
同济大学贺文雅、吴兵等人将高速道路驾驶行为分成四种要素:
速度控制行为、变换车道行为、不良驾驶行为、跟车驾驶行为。
此外,将速度控制行为细分为猛加速、超速、车速离散程度高、频繁加速、急制动等驾驶行为;变换车道行为细分为换道时转向灯使用不当、换道频繁、换道时车辆间距小、换道时转向盘使用不当等驾驶操作;不良驾驶行为细分为驾驶时不专心、疲劳驾驶、酒后驾驶不使用安全带、无证驾驶等驾驶状态;跟车驾驶行为细分为引导车对视线的遮挡、跟车时距小、跟车间距小等驾驶状态。
最后选用层次分析法,得出换道频繁是高速道路中风险性最高的驾驶行为。
因此,高速道路驾驶行为分析需要关注换道次数、连续换道状况、换道时间等实际评价指标。
吉林大学任园园、李显生等人以公路弯道路段的驾驶行为为研究对象,从驾驶员行车过程和行为决策模式入手,深入分析路段的安全特性,提出路段行车危险区域概念并探究其形成机理,探讨路段行车风险的构成,从而研究弯道路段对驾驶员行为的影响。
5.2.3特定情形下的驾驶行为综述
汪澎、刘志强基于驾驶过程中多作业工况的影响以及驾驶员个体注视行为特征的多元性,提出以驾驶员2个瞳孔间的距离作为表征驾驶员左右注视的参量,以嘴巴到双眼连线中点间的距离作为表征驾驶员俯仰注视的参量,二者合成“T”特征信息。
以虹膜-巩膜比例与位置特征信息表征驾驶员的斜视行为,同时结合眼睛闭合度共同表征驾驶员不良注视特征的参量集合。
采用多分类支持向量机(SVM)技术,对驾驶员不良注视行为进行模式分类与融合评价。
王喜梅、刘辉等通过对起重机驾驶员进行量化评价,了解起重机驾驶员的安全行为能力状况,以期降低操作过程可能的事故发生概率。
根据驾驶员的职业特点和行为要求,将起重机驾驶员的行为能力分为4个一级指标,12个二级指标。
并用层次分析法确定出指标的权重,模糊综合分析法确定出指标的隶属关系,建立起重机驾驶员的安全行为能力研究模型。
戴彤焱、徐宁等人通过问卷调查数据分析突发事件下驾驶员行为特征,以及突发事件下人口统计学特征差异对驾驶员心理、生理的影响,并阐述突发事件下驾驶员操作行为特性。
经过研究分析得出,道路交通突发事件对驾驶员生理、心理及操作行为有一定影响。
可为降低突发事件下行车风险提供依据。
5.2.4驾驶员测试评价研究综述
北京交通大学的向往基于驾驶风险的层级式驾驶行为模型,将驾驶行为分为基本车辆控制技巧(低风险)、动态决策(中风险)、交通应急反应(高风险)三个风险层级,用于分析不同风险层级下驾驶行为规律和风险产生机制。
采用“驾驶模拟场景+干预因素”的方法进行实验场景设计。
如图3所示。
并列出了几个典型驾驶场景的指标如图4、5、6所示。
 升级会员
升级会员 